В рулевых приводах автоматического действия управление производится с помощью авторулевого, который автоматически удерживает судно на заданном курсе, осуществляя автоматическое управление по углу отклонения судна.
На рис.2.7 изображена принципиальная схема простейшего контактного авторулевого.
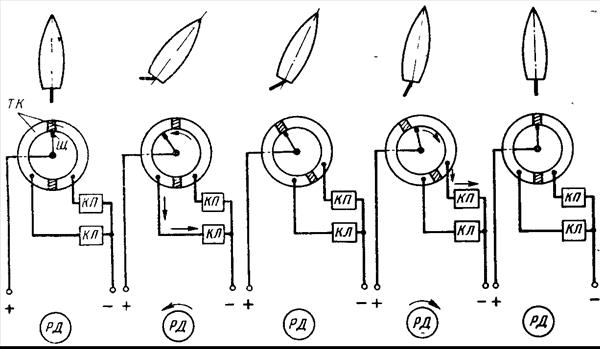
Рис.2.7 Принципиальная схема простейшего контактного авторулевого.
Контактное устройство состоит из двух концентрических токопроводящих полуколец ТК, разделенных изоляционными промежутками, каждое из которых соединено с одним из реверсивных контакторов контакторной схемы управления рулевым двигателем. Полукольца могут поворачиваться и связаны с баллером руля электрической синхронной передачей обратной связи, выполненной при помощи сельсинов. По полукольцам скользит подвижная щетка Щ, механически связанная с ротором сельсина-приемника репитера гирокомпаса, от которого поступает сигнал рассогласования.
Если судно идет заданным курсом, то щетка находится на изоляционном промежутке. В этом случае рулевой двигатель не работает.
При отклонении судна от курса ротор сельсина-приемника репитера гирокомпаса передвигает щетку на одно из токоведущих полуколец. При этом один из контакторов получает питание, срабатывает и подключает рулевой двигатель к питающей сети, вследствие чего рулевой двигатель перекладывает руль в сторону, обеспечивающую возвращение судна на заданный курс. С баллером руля механически связан сельсин-датчик синхронной передачи обратной связи, который в результате кладки руля поворачивается, что приводит к повороту сельсина-приемника обратной связи, механически связанного с токопроводящими полукольцами. Вращение сельсина-приемника обратной связи вызывает поворот полуколец в сторону устранения рассогласования между изоляционным промежуткам и щеткой. Полукольца поворачиваются и подводят изоляционный промежуток под сместившуюся щетку. Перекладка руля прекращается, как только щетка окажется на изоляционном промежутке. Руль при этом остается переложенным на определенный угол.
Одновременно с возвращением судна под действием переложенного руля на заданный курс сельсин-приемник репитера гирокомпаса перемещает щетку в обратном направлении, и она оказывается на втором полукольце. Второй контактор получает питание, срабатывает, рулевой двигатель реверсируется и перекладывает руль к диаметральной плоскости. При этом синхронная передача обратной связи возвращает полукольца в исходное положение, подводя изоляционный промежуток под щетку в тот момент, когда судно возвращается на заданный курс. Рулевой двигатель останавливается, и вся система приходит в первоначальное положение.
Рассмотренная схема простейшего контактного авторулевого не вполне решает задачу автоматического управления судном на курсе, так как величина углов начальной кладки руля получается произвольной. Автоматическое удержание судна на курсе с помощью такого авторулевого осуществлялось бы короткими и частыми перекладками руля, что создавало бы дополнительную нагрузку на рулевой привод. Кроме того, такой авторулевой не производил бы процесса удерживания.
Для устранения указанных недостатков в конструкции контактных авторулевых применяются специальные регуляторы, повышающие точность удержания судна на курсе и разгружающие рулевой привод.
Контактные авторулевые имеют довольно сложную и громоздкую конструкцию и требуют тщательного ухода за контактами. Поэтому современные авторулевые работают на бесконтактных элементах. Такие авторулевые обеспечивают автоматическое управление рулевым приводом не только по углу отклонения судна от курса, но и по скорости отклонения.
Грузоподъемные механизмы.
Предназначены для погрузки, выгрузки и перемещения грузов. На судах рыбопромыслового флота используются более интенсивно, чем на судах других отраслей, и их работа в море имеет ряд специфических особенностей. Судовые грузоподъемные механизмы должны обладать надежностью в эксплуатации, высокой производительностью, быть экономичными, иметь удобное управление, малую массу, габариты и стоимость. Режим работы – повторно – кратковременный. Наиболее распространен привод с реверсированием исполнительного эл. двигателя и регулированием его частоты вращения в широких пределах.
Системы управления судовыми грузоподъемными механизмами с электроприводом делятся на системы с непосредственным управлением – контроллерные, системы с дистанционным управлением – релейно-контакторные и выполненные по принципу Г – Д, системы с централизованными постами управления всем комплексом погрузки и разгрузки. В зависимости от рода тока грузоподъемные механизмы выполняют с эл. двигателем постоянного или переменного тока.
В качестве исполнительного двигателя применяют двигатели постоянного тока смешанного возбуждения, независимого возбуждения (схема Г – Д), короткозамкнутые асинхронные многоскоростные двигатели.
Развитие систем управления характеризуется наличием нескольких уровней автоматизации. Первый уровень – системы с непосредственным управлением (контроллерные). Второй уровень – системы дистанционного управления с обратной связью. Третий уровень предусматривает применение централизованных постов, систем управления группой взаимосвязанных судовых подъемных механизмов, использование ЭВМ с целью управления всем комплексом погрузки – разгрузки без участия оператора.
Дата: 2019-07-30, просмотров: 817.