В электрогидравлических рулевых приводах гидравлические машины, при помощи которых осуществляется перекладка руля, бывают с насосами постоянной и переменной производительности. При наличии насоса постоянной производительности руль перекладывается только во время работы насоса. Изменение направления и скорости перекладки руля обеспечивается изменением направления вращения и регулированием скорости исполнительного приводного электродвигателя насоса. Такие насосы обычно применяются для рулевых приводов небольшой мощности, при этом исполнительные приводные двигатели насосов управляются по контакторной системе управления.
При наличии насоса переменной производительности производительность насоса, от которой зависит скорость перекладки руля и направление нагнетания жидкости, определяющее направление перекладки руля, изменяется специальным регулирующим устройством насоса, при этом скорость вращения исполнительного приводного двигателя остается неизменной. Управление исполнительным приводным двигателем насоса, в качестве которого используется асинхронный короткозамкнутый двигатель, осуществляется в этом случае обычно по контакторной схеме. Регулирующее устройство насоса имеет дистанционный привод, который выполняется при помощи электродвигателей, называемых двигателями управления. Управление этими двигателями производится при помощи поста управления командоконтроллерного типа. На рис.2.5 приведены кинематическая и электрическая схемы электрогидравлического рулевого привода. Привод имеет два насоса 7 переменной производительности, один из которых резервный. Насосы механически связаны с исполнительными приводными асинхронными короткозамкнутыми электродвигателями 8. Регулирующее устройство насосов приводится в действие двумя электродвигателями управления 1 постоянного тока, которые питаются от одного из двух преобразователей, не показанных на схеме. Оба двигателя работают одновременно через дифференциальную передачу 3.
При выходе из строя одного из двигателей управления работу системы обеспечивает второй двигатель, но с половинной скоростью. Эти двигатели управляются дистанционно при помощи поста управления рулевым приводом 14 командоконтроллерного типа через магнитную станцию 9. Второй пост управления, не показанный на схеме, включается в действие переключателем 13. При повороте штурвала поста управления двигатели управления начинают работать, вращая через систему конических передач задающий валик 20, с которым связан сельсин-датчик 17, электрически связанный со стрелочным сельсином-приемником 12, установленным на посту управления. Стрелка сельсина 12 показывает величину задаваемого угла перекладки. По достижении ею нужного положения двигатели управления останавливают возвращением штурвала поста управления в нулевое положение.
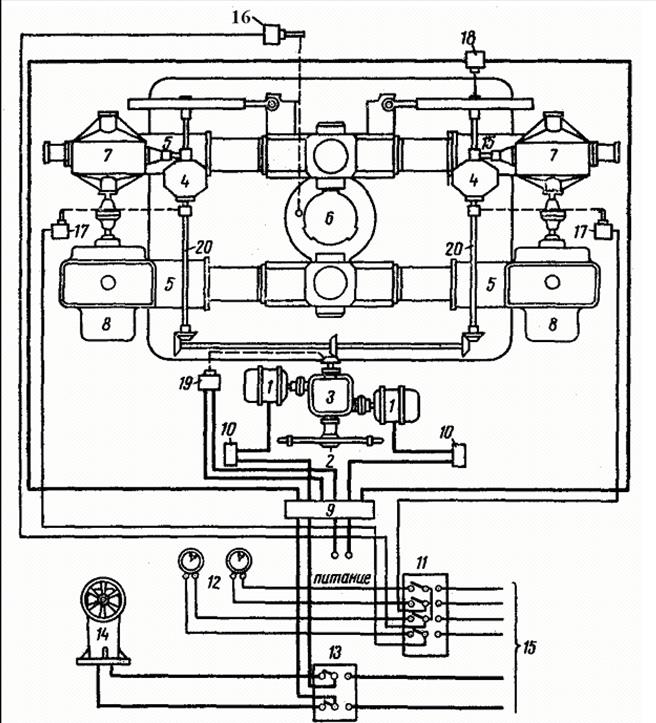
Рис.2.5. Кинематическая и электрическая схемы электрогидравлического рулевого привода
1–электродвигатель управления; 2–штурвал ручного управления; 3–дифференциальная передача; 4–передача к плунжеру насоса; 5–гидравлические прессы; 6–баллер руля; 7–насос; 8–электродвигатель насоса; 9–магнитная станция; 10–ящик сопротивлений; 11–переключатель указателей; 12– указатель угла перекладки руля; 13–переключатель постов управления; 14– пост управления; 15–цепи к другому ПУ; 16–датчик рулевых указателей; 17–датчик указателей задаваемого угла перекладки руля; 18–путевой указатель ламповой сигнализации; 19–конечный выключатель; 20–задающий валик.
Вращение задающего валика вызывает при помощи дифференциальной передачи 4 смещение регулирующего устройства насоса на максимальную величину, вследствие чего начинается перекладка руля. Одновременно приводится в движение зубчатая рейка и начинает вращаться валик обратной связи. В дифференциальной передаче имеется специальное кулачковое устройство. Поэтому регулирующее устройство насоса возвращается в исходное положение только тогда, когда перо руля приближается к заданному углу перекладки. Этот процесс заканчивается при
достижении рулем требуемого угла. Угол фактической перекладки руля контролируется с помощью сельсина-датчика 16, связанного с баллером руля и связанного электрически со вторым стрелочным сельсином-приемником 12, встроенным в тот же корпус, что и первый. Вторая стрелка прибора показывает угол перекладки руля.
Рассмотренная система является следящей, причем следящее управление обеспечивается не электрическим путем, а с помощью механической системы передач от двигателя управления и баллера руля к регулирующему устройству насоса. Достоинством такой системы является работа насоса и его электропривода с максимальной мощностью на протяжении почти всего периода перекладки, так как регулирующее устройство насоса в самом начале перекладки смещается на наибольшую величину. Недостатком системы является то, что она не позволяет регулировать скорость перекладки. Исполнительные приводные асинхронные короткозамкнутые двигатели управляются по контакторной схеме при помощи кнопок управления.
На судах флота рыбной промышленности нашли применение электрогидравлические рулевые приводы.
Схема управления насосами переменной подачи дана на рис. 2.6
Работа схемы. Для запуска двигателей 1АД и 2АД в румпельном помещении включают установочные автоматы IАУ и 2АУ. Предварительно необходимо убедиться в том, что сигнальная лампа 1ЛС, сигнализирующая о подаче питания на шины от ГРЩ работает.
Пуск двигателей можно осуществить из румпельного помещения, установив выключатели IВМ и 2ВМ в положение М — местный пуск, или с поста управления рулевым приводом с помощью выключателей 1ВД и 2ВД, но в этом случае выключатели IВМ и 2ВМ должны быть установлены в положение Д — дистанционный пуск. И в том, и в другом случае получают питание катушки линейных контакторов. Л1 и Л2 и происходит пуск в работу двигателей насосов. После пуска двигателей включаются в работу схемы сигнализации и схема авторулевого. Через замкнутые контакты тепловых реле IРТ, 2РТ, 3РТ и 4РТ получают питание катушки реле 1Р и 3Р. Последние срабатывают и контактами 1Р1 и 3Р1 обрывают цепь питания катушек реле времени 1РВ и 2РВ, а контактами 1Р2 и 3Р2—цепь питания ревуна Рв. Под напряжением находятся и катушки реле 2Р и 4Р, которые замкнут свои контакты 2Р и 4Р, подготавливая цепь катушки реле 5Р и ревуна Рв к работе. В связи с тем что реле 1РВ и 2РВ обесточены, их контакты в цепях ламп 3ЛС и 4ЛС замкнуты. Лампы работают, сигнализируя о нормальной работе двигателей. В случае возникновения небольших по величине, но длительных по времени перегрузок, например двигателя 1АД, контакты тепловых реле оборвут цепь питания реле 1Р. Контакт 1Р1 замкнется и подаст напряжение на катушку реле 1РВ. Контакт 1Р2 также замкнется, и через контакт 5Р получит питание и начнет работать ревун Рв. Для снятия звукового сигнала нажимают на кнопку КСС, подавая напряжение на катушку реле 5Р. Последнее зашунтирует КСС и отключит ревун. Размыкающие с выдержкой времени при замыкании контакты 1РВ1 и 1РВ2 обеспечат работу катушки 1РВ и лампы 3ЛС в прерывистом режиме. Мигание лампы 3ЛС будет продолжаться до тех пор, пока не исчезнет перегрузка двигателя 1АД. Сигнализация системы двигателя 2АД работает аналогично. Защиту двигателей от коротких замыканий обеспечивают установочные автоматы 1АУ и 2АУ, а цепи управления защищаются предохранителями.
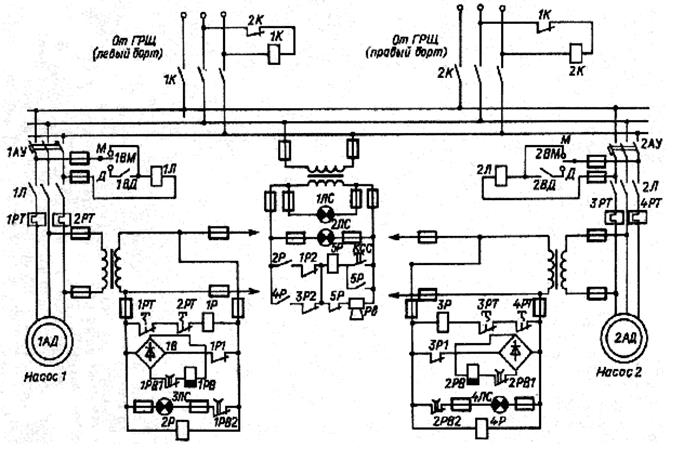
Рис 2.6. Схема управления насосами переменной подачи электрогидравлического рулевого привода
Дата: 2019-07-30, просмотров: 1220.