Предположим, что известны массы и моменты инерции двигателей и передаточных механизмов, осуществляющих перемещение звеньев манипуляционного робота, а также их параметры, позволяющие записать математическую модель исполнительного механизма в виде следующего векторно-матричного уравнения:
 ,…. (2.62)
,…. (2.62)
где  - векторы соответственно обобщенных координат, скоростей, ускорений и третьей производной по времени от
- векторы соответственно обобщенных координат, скоростей, ускорений и третьей производной по времени от  ;
;
 - диагональная матрица известных коэффициентов,
- диагональная матрица известных коэффициентов,  ;
;
 - диагональная матрица приведенных моментов и масс собственно двигателей и передаточных механизмов,
- диагональная матрица приведенных моментов и масс собственно двигателей и передаточных механизмов,  ;
;
 а
а
|
 б
б
|
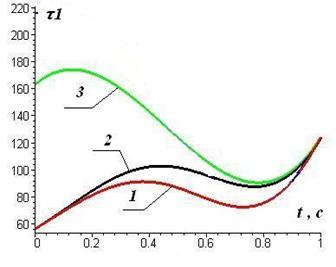
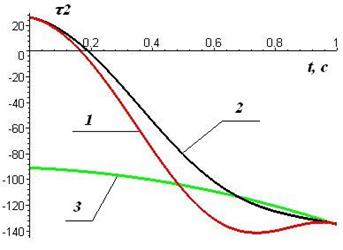
| Рис.2.8. Силыи моменты сил в сочленениях при различных методах упрощения модели: а) - в 1-м сочленении; б) - в 2-м сочленении, здесь 1- полная модель; 2- модель, упрощенная по Полу; 3- модель, линеаризованная в конечной точке |
 -
-  -вектор известных функций сил вязкого трения;
-вектор известных функций сил вязкого трения;
 -
-  -вектор известных функций сил и моментов сил демпфирования;
-вектор известных функций сил и моментов сил демпфирования;
 - диагональная матрица передаточных отношений дополнительных механизмов (редукторы, червячные передачи и т.п., для пневмо- и
- диагональная матрица передаточных отношений дополнительных механизмов (редукторы, червячные передачи и т.п., для пневмо- и
гидроприводов это, как правило, единичная матрица). Например, для  - й редукторной передачи
- й редукторной передачи  , здесь - передаточное число,
, здесь - передаточное число,  - кпд редуктора;
- кпд редуктора;
 - диагональная матрица коэффициентов управления,
- диагональная матрица коэффициентов управления,  ;
;
 - -вектор управляющих воздействий;
- -вектор управляющих воздействий;
 - -вектор обобщенных сил и моментов, приведенных к осям соответствующих сочленений и вызванных механической системой манипулятора. По существу, вектор
- -вектор обобщенных сил и моментов, приведенных к осям соответствующих сочленений и вызванных механической системой манипулятора. По существу, вектор  однозначно определяется из уравнения динамики (2.25), =
однозначно определяется из уравнения динамики (2.25), =  ;
;
 - -вектор измеряемых дополнительных возмущений (например, измеряемых силомоментными датчиками), приведенных к осям соответствующих двигателей;
- -вектор измеряемых дополнительных возмущений (например, измеряемых силомоментными датчиками), приведенных к осям соответствующих двигателей;
 - -вектор неизмеряемых возмущений (вязкое трение механической системы робота в среде, неизмеряемые нагрузки силового взаимодействия со средой и т.п.), приведенных к осям соответствующих двигателей;
- -вектор неизмеряемых возмущений (вязкое трение механической системы робота в среде, неизмеряемые нагрузки силового взаимодействия со средой и т.п.), приведенных к осям соответствующих двигателей;
здесь  - число степеней подвижности манипуляционного робота.
- число степеней подвижности манипуляционного робота.
С учетом принятых положений о динамике двигателей и полученного ранее уравнения динамики механической системы (2.25) полная динамика робота может быть представлена следующим матричным выражением:
 .(2.63)
.(2.63)
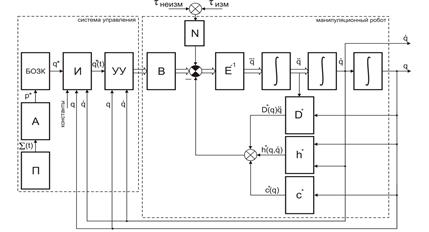
Или, сгруппировав элементы уравнения (2.63) по степени производной по времени от вектора , получим:
 (2.64)
(2.64)
Структурная схема манипуляционного робота, соответствующая уравнению (2.64), представлена на рис. 2.9.
При допустимости предположения, что  (например, для двигателей постоянного тока), справедливо следующее уравнение динамики манипуляционного робота с учетом двигателей:
(например, для двигателей постоянного тока), справедливо следующее уравнение динамики манипуляционного робота с учетом двигателей:
 (2.65)
(2.65)

При малых значениях коэффициентов передачи передаточных механизмов (до 10) влияние динамики приводов на общую динамику манипуляторов незначительно и для описания полной модели динамики робота, в левой части уравнений (2.63)-(2.65), достаточно учитывать только динамическую модель его механической системы.
Дата: 2019-04-23, просмотров: 342.