Итак, в предыдущем пункте мы получили параметры звеньев, свели их в табл. 1. Теперь, подставив эти параметры в матрицу преобразований Денавита-Хартенберга (1.33), мы можем получить матрицы однородных преобразований:  , описывающую положение и ориентацию системы координат 1-го звена относительно базовой 0-й системы;
, описывающую положение и ориентацию системы координат 1-го звена относительно базовой 0-й системы;  , описывающую положение и ориентацию системы координат, жестко связанной со 2-м звеном, в системе координат 1-го звена и так далее, вплоть до матрицы
, описывающую положение и ориентацию системы координат, жестко связанной со 2-м звеном, в системе координат 1-го звена и так далее, вплоть до матрицы  , которая описывает положение и ориентацию n-й системы координат, связанной с последним n-м звеном, где и закреплен рабочий орган МР в системе координат (n-1)-го звена. Рассмотрим пример получения этих матриц на основе данных, приведенных в табл. 2.
, которая описывает положение и ориентацию n-й системы координат, связанной с последним n-м звеном, где и закреплен рабочий орган МР в системе координат (n-1)-го звена. Рассмотрим пример получения этих матриц на основе данных, приведенных в табл. 2.
Пример 1.8. Для манипуляционного двухзвенника, рассмотренного в примерах 1.6 и 1.7, требуется получить матрицы однородных преобразований, отражающие связь между системами координат двух соседних звеньев (естественно, включая неподвижное, нулевое звено).
Решение. Подставим параметры 1-го звена из первой строки табл. 2 в матрицу преобразований Денавита-Хартенберга (1.33). Получим матрицу однородных преобразований системы координат 1-го звена в системе координат 0-го , неподвижного звена:
 .
.
Аналогичным образом, подставляя параметры 2-го звена в матрицу (1.33), имеем:
 .
.
Как уже было отмечено выше, полученные матрицы отражают связь только между соседними звеньями. А как получить матрицу преобразований, описывающую систему координат некоторого k-го звена относительно системы координат некоторого j-го звена, при j<k, т.е. матрицу  ? Естественно, мы предполагаем, что нам известны матрицы
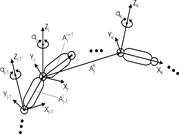
? Естественно, мы предполагаем, что нам известны матрицы  , построенные с использованием параметров из табл. 1. Возможны два варианта рассуждений, позволяющие получить искомое решение. Первый из них основан на правиле «последовательных преобразований» [3] и продемонстрирован на рис. 1.11, а.
, построенные с использованием параметров из табл. 1. Возможны два варианта рассуждений, позволяющие получить искомое решение. Первый из них основан на правиле «последовательных преобразований» [3] и продемонстрирован на рис. 1.11, а.
 а …….
а ……. 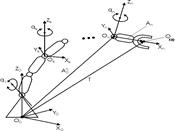 б
б
Рис. 1.11. Преобразования систем координат: а -  ; б -
; б -  и T
и T
Из рисунка следует, что для получения преобразования  необходимо последовательно перемножить матрицы преобразований, соответствующие векторам, сумма которых является вектором . В соответствии с этим правилом имеем
необходимо последовательно перемножить матрицы преобразований, соответствующие векторам, сумма которых является вектором . В соответствии с этим правилом имеем
 . (1.34)
. (1.34)
|
 есть матрица однородных преобразований для этих систем. Теперь за подвижную примем (k -1)-ю систему координат, а (k -2)-ю − за неподвижную. Очевидно, что в соответствии с правилом 2, изложенным в п. 1.4.3, предыдущий результат, т.е. матрицу , мы должны слева доумножить на матрицу
есть матрица однородных преобразований для этих систем. Теперь за подвижную примем (k -1)-ю систему координат, а (k -2)-ю − за неподвижную. Очевидно, что в соответствии с правилом 2, изложенным в п. 1.4.3, предыдущий результат, т.е. матрицу , мы должны слева доумножить на матрицу  . Последовательно выполняя композицию преобразований j-й системы координат к k-й системе, мы также получим выражение (1.34).
. Последовательно выполняя композицию преобразований j-й системы координат к k-й системе, мы также получим выражение (1.34).
Теперь очевидно, что для получения матрицы однородных преобразований n-й системы координат, жестко связанной с n-м, конечным звеном (см. рис. 1.11,б) в базовую систему координат, связанную с неподвижным, нулевым звеном манипуляционного робота, необходимо использовать следующее выражение, аналогичное выражению (1.34):
 . (1.35)
. (1.35)
Матрица (1.35) определяет положение n-й системы координат и ориентацию ее осей относительно базовой системы координат. Предположим, что центр n-й системы координат, построенной в соответствии с правилами, изложенными выше, не совпадает с рабочим органом манипулятора или какой − то его характеристической точкой Oхар (рабочая кромка резца, выходное отверстие краскопульта и т.п.). И что эта точка в n-й системе координат описывается матрицей однородных преобразований An вида
 ,
,
где  - координаты характеристической точки рабочего органа манипулятора в n-й системе координат.
- координаты характеристической точки рабочего органа манипулятора в n-й системе координат.
Тогда матрица T, определяемая выражением
 (1.36)
(1.36)
называется матрицей манипулятора. Именно эта матрица несет информацию об ориентации и положении рабочего органа МР в базовой системе координат как функции обобщенных координат qi , i=  , здесь n-число звеньев.
, здесь n-число звеньев.
Следует отметить, что если центр n-й системы координат совпадает с характеристической точкой рабочего органа МР, то матрица An является единичной и, соответственно, матрица манипулятора определяется выражением (1.35).
В матрице манипулятора T и в матрицах  подматрицы направляющих косинусов R 3 x 3 из выражения (1.22) сохраняют все свойства, изложенные в п. 3.4, что может быть использовано для проверки корректности их определения.
подматрицы направляющих косинусов R 3 x 3 из выражения (1.22) сохраняют все свойства, изложенные в п. 3.4, что может быть использовано для проверки корректности их определения.
Пример 1.9. Определить матрицу манипулятора для манипуляционного двухзвенника, рассмотренного в примере 1.6, если характеристическая точка его рабочего органа совпадает с центром системы координат O2X2Y2Z2.
Решение. В соответствии с условиями задачи используем выражение (1.35) и результаты примера 1.9. Получим:
 ,
, 
Решение ПЗК
Теперь отметим наиболее важный момент в разделе кинематики манипуляционных роботов: решение прямой задачи кинематики (1.1) определяется наддиагональными элементами матрицы манипулятора T .
То есть решение ПЗК в общем случае имеет вид
 , (1.37)
, (1.37)
где x , y , z - координаты положения характерной точки рабочего органа МР; φ, γ, ξ- углы ориентации системы координат, жестко связанной с рабочим органом МР в базовой, неподвижной системе координат.
Решение ПЗК, представленное векторами (1.1) и (1.37), имеет размерность (mx1). Поскольку мы рассматриваем кинематически безызбыточные манипуляторы, т.е. когда m=n, с кинематическими парами пятого класса, то размерность вектора решения ПЗК определяется количеством звеньев кинематической цепи. Так, для матрицы манипулятора, полученной в примере 1.9, решение прямой задачи кинематики имеет вид
 ,
,
где x, y- координаты точки O2 в базовой системе координат.
Если же пространственный манипулятор имеет три звена, то решением ПЗК являются элементы T(1,4), T(2,4), T(3,4) матрицы манипулятора T.
|
|
Следует отметить еще раз, что размерность вектора  . Это означает, что даже при числе звеньев механической системы неплоского манипулятора n>6, т.е. при кинематической избыточности МР размерность вектора p не может быть больше шести.
. Это означает, что даже при числе звеньев механической системы неплоского манипулятора n>6, т.е. при кинематической избыточности МР размерность вектора p не может быть больше шести.
1.7. Решение ПЗК на примере манипуляционного трехзвенника
В качестве примера рассмотрим манипуляционный робот (МР) с цилиндрической системой координат и состоящий из трех звеньев. Общий вид МР и направление осей вращения в сочленениях представлены на рис. 1.12, где q 1 , q 2 , q 3 – обобщенные координаты. Такой МР может применяться для выполнения многообразных операций – сборки, монтажа, сортировки, упаковки, погрузки − разгрузки и т. д.
- Построим связанные системы координат в соответствии с правилами, изложенными в п. 1.6.1 (см. рис. 1.12). Здесь
 - базовая (связанная с неподвижным основанием) система координат;
- базовая (связанная с неподвижным основанием) система координат;  - системы координат, жестко связанные с i-ми звеньями.
- системы координат, жестко связанные с i-ми звеньями.
2. В соответствии с п. 1.6.2 и рис. 1.12 заполним табл. 3 параметров МР.
Таблица 3
Параметры звеньев трехзвенника
| Звено | d | a | 
| 
| 
| 
| 
| 
|
| 1 | 0 | 0 | 
| 0 | 
|  
| 1 | 0 |
| 2 | q2+0,5l2 | -a | 0,5π | 0,5π | 0 | 1 | 0 | 1 |
| 3 | 
| 0 | 0 | 0 | 1 | 0 | 1 | 0 |
3. Для каждой кинематической пары, используя преобразование Денавита-Хартенберга (1.33), получим матрицы однородных преобразований систем координат:
 ;
;  ;
;
 .
.
4. Примем точку O4 за характеристическую точку схвата и вычислим матрицу манипулятора как произведение матриц:
 =
=  ,
,
где  , здесь l 4 - аппликата точки O4 в системе координат третьего звена.
, здесь l 4 - аппликата точки O4 в системе координат третьего звена.
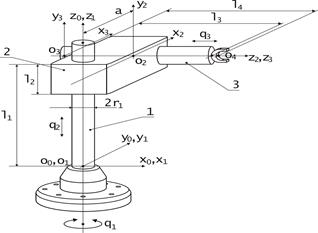
Рис. 1.12. Трехзвенный манипулятор
В соответствии с п. 1.6.4 решение ПЗК для представленного манипулятора имеет вид:
 . (1.38)
. (1.38)
Для самопроверки можно подставить фиксированные значения обобщенных координат в решение ПЗК и сравнить значения базовых координат схвата с получаемыми из геометрических соображений по рис. 1.13.
Рис. 1.13. Рабочая зона МР с цилиндрической системой координат
Дата: 2019-04-23, просмотров: 586.