Итак, в параграфе 1.5 мы получили матрицу однородных преобразований Денавита-Хартенберга, которая позволяет определить связь между системами координат, жестко связанными со звеньями, образующими кинематические пары пятого класса. Рассмотрим теперь процедуру получения этих матриц для кинематической цепи манипуляционного робота, содержащей n кинематических пар пятого класса или, что в данном случае одно и то же, n звеньев механической системы.
1.6.1.Построение связанных систем координат
Следует сразу же отметить, что правильность построения систем координат определяет корректность определения параметров, входящих в матрицу преобразований Денавита-Хартенберга.
Чтобы ввести системы координат, жестко связанные с каждым из звеньев механической системы манипулятора, применим следующий алгоритм [3].
1. Первая система координат, связанная с неподвижным основанием, обозначается обычно как О0 X 0 Y 0 Z 0. Начало координат этой системы принимается за 0-е сочленение.
2. Строим ось O 0 Z0 таким образом, чтобы она совпадала с осью первого сочленения (осью вращения или осью поступательного перемещения в первом сочленении). Причем положение точки O 0 выбирается произвольным образом.
3. Направление оси О0 X 0 выбирается произвольным образом.
4. Направление оси О0 Y0 выбирается таким образом, чтобы система О0X0Y0 Z0 была правой. Напомним, что у правой системы координат, если смотреть со стороны положительного направления оси O 0 Z 0, то поворот оси О0 Y 0 в направлении оси О0X0 осуществляется по часовой стрелке.
5. Проделать следующие пункты последовательности для каждого i-го звена,  , т.е. исключая конечное звено, где расположен рабочий орган МР.
, т.е. исключая конечное звено, где расположен рабочий орган МР.
6. Построить все оси Zi, совпадающими с осями поступательного движения или вращения в (i + 1)-м сочленении.
7. Задать начало i-й системы координат либо на пересечении осей Z i и Zi -1 , либо в точке пересечения оси Z i с общей нормалью к осям Z i и Z i-l .
|
9. Задать ось OiYi для завершения правосторонней системы координат.
10. Направление оси Zn выбирается совпадающим с продольной осью n-го звена или с осью предыдущего звена Zn -1 . Оси OnXn и OnYn строятся по правилам, изложенным в пп. 8, 9 алгоритма. Следует отметить, что выбор оси Zn может не всегда оказаться удачным, что не позволит корректно определить параметры звена (некоторые параметры n-го звена невозможно определить по ниже излагаемому алгоритму). В этом случае, если первоначальное направление оси Zn совпадало с продольной осью n-го звена, следует выбрать направление оси Zn такое же, как и у оси Zn -1 и наоборот, если первоначальное направление оси Zn совпадало с направлением оси Zn -1, следует выбрать направление оси Zn совпадающим с продольной осью n-го звена.
Следует напомнить еще раз, что каждая из построенных систем координат О i XiYi Zi жестко связана с i-м звеном и совершает перемещение вместе с этим звеном. Указанное обстоятельство очень важно при определении параметров звеньев.
Пример 1.6. Для кинематической схемы манипуляционного двухзвенника, представленной на рис.1.10, необходимо построить системы координат в соответствии с изложенными правилами. Длина первого звена равна l1, второго − l2.
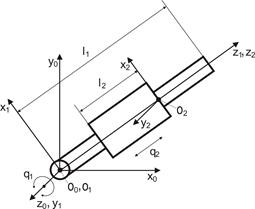
Рис. 1.10. Построение систем координат для манипуляционного двухзвенника
Решение. Ось первого сочленения является осью вращения первого звена, отрабатывающего координату q1. Ось второго сочленения совпадает с направлением поступательного перемещения второго звена, определяемого координатой q2. Построим базовую систему координат O0X0Y0Z0 в соответствии с пп.1-4 алгоритма. Причем ось O0Z0 совпадает с осью первого сочленения. Построим систему координат O1X1Y1Z1 жестко связанную с первым звеном в соответствии с пп.5-9 алгоритма. Следует обратить внимание, что ось Z1 совпадает с осью второго сочленения, а ось O1X1 перпендикулярна осям O1Z1 и O0Z0. Ось Z2 строим в соответствии с п. 10 алгоритма и она должна совпадать с осью O1Z1, а начало системы координат O2X2Y2Z2 (точка O 2) выбираем на торце второго звена. Все построения представлены на рис. 1.10.
Дата: 2019-04-23, просмотров: 393.