В дальнейшем под манипуляционным роботом (МР) будем понимать многофункциональное, перепрограммируемое устройство, предназначенное для имитации двигательных и (или) рабочих функций руки человека и управляемое оператором или действующее автоматически [1, 2].
Манипуляционные роботы состоят из механической системы, исполнительных устройств, сенсорных элементов и системы управления. Вид простейшего манипуляционного робота с цилиндрической системой координат представлен на рис.1.1.
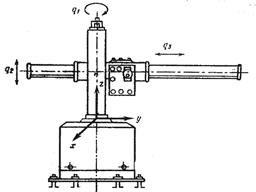
Рис. 1.1. Манипуляционный робот с цилиндрической системой координат
Кинематическая цепь механической системы робота, чаще всего разомкнутая, состоит из нескольких твердых тел (звеньев), последовательно соединенных вращательными или поступательными сочленениями, приводимыми в движение исполнительными устройствами.
|
Соединения (сочленения) звеньев бывают трех видов: поворотные (вращательные), призматические (телескопические), комбинации этих двух типов. Множество применяемых в роботах сочленений приведено в работе [3].
Сочленение, совместно с соседними двумя звеньями, образует кинематическую пару. Виды наиболее распространенных в робототехнике кинематических пар пятого класса представлены на рис. 1.2.
а б
Рис. 1.2. Кинематические пары пятого класса: а) с поворотным (вращательным) сочленением; б) с призматическим (поступательным) сочленением
В дальнейшем при рассмотрении МР будем предполагать, что звенья робота образованы кинематическими парами именно этого класса.
Схематичное представление кинематической цепи МР называется кинематической схемой МР. Кинематическая схема робота, представленного на рис.1.1, приведена на рис. 1.3.
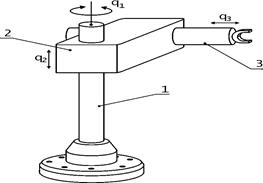
Рис. 1.3. Кинематическая схема МР с цилиндрической системой координат
Механическая система робота может состоять из n звеньев. Нумерация звеньев на схеме осуществляется по следующему правилу: неподвижному звену присваивается нулевой номер (на рисунке не отражено), нумерация последующих звеньев осуществляется, начиная с первого, до n-го, на котором закреплен рабочий орган (схват, лазер, краскопульт и т.п.).
В некоторой литературе используется символьная форма записи кинематики МР, с использованием следующих обозначений: В - вращательное (поворотное) сочленение; П – поступательное (призматическое) сочленение; ║- ось сочленения параллельна оси предыдущего сочленения; ⊥- ось сочленения перпендикулярна оси предыдущего сочленения. Так, например, кинематическая схема, представленная на рис. 1.3, может быть записана в следующей символьной форме: В║П⊥П.
Рассмотрим более детально системы координат МР и образуемые ими пространства.
Дата: 2019-04-23, просмотров: 498.