Равновесие означает такое состояние объекта (системы), которое он сохраняет при отсутствии внешних воздействий.
Задачи экономической динамики включают как описание процессов выхода к состоянию равновесия, так и процессов трансформации самого этого состояния под воздействием внешних сил.
Рассмотрим простую экономическую систему в состоянии равновесия и опишем движение такой системы в непрерывном и дискретном случаях.
В первом случае динамика системы описывается с помощью дифференциального уравнения, во втором – с помощью разностного уравнения.
В непрерывном случае дифференциальное уравнение связывает изменения показателя (если наша система описывается одним показателем x(t), или просто х) со скоростью его движения  .
.
Будем считать, что скорость изменения показателя х пропорциональна величине его отклонения от равновесного значения  , т.е. чем дальше показатель отклонился от равновесного значения, тем быстрее он стремится вернуться к нему.
, т.е. чем дальше показатель отклонился от равновесного значения, тем быстрее он стремится вернуться к нему.
Если в уравнении присутствует только первая производная х по времени, а сама связь линейна, то это линейное дифференциальное уравнение.
1. Пусть линейное неоднородное дифференциальное уравнение имеет, например, следующий вид (для непрерывного времени):

где k – коэффициент пропорциональности.
В этом уравнении  – свободный член.
– свободный член.
Без него уравнение  называется однородным и его решение
называется однородным и его решение
 .
.
Исходное неоднородное уравнение имеет частное решение
(если величина х находится в состоянии равновесия), а общее решение неоднороднго уравнения есть сумма любого частного решения и общего решения однородного уравнения, то есть
Учитывая, что при t = 0 величина х равна х(0), получаем
Общее решение исходного неоднородного уравнения имеет вид

Если k < 0, то  и равновесие устойчиво, то есть при отклонении величины x(t) от значения она вновь стремится принять это значение (рис. 3.1).
и равновесие устойчиво, то есть при отклонении величины x(t) от значения она вновь стремится принять это значение (рис. 3.1).
Непрерывное время
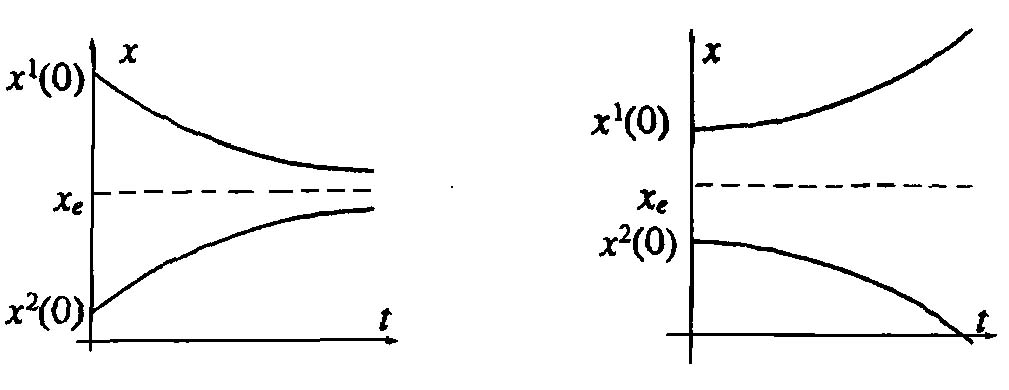
Дискретное время
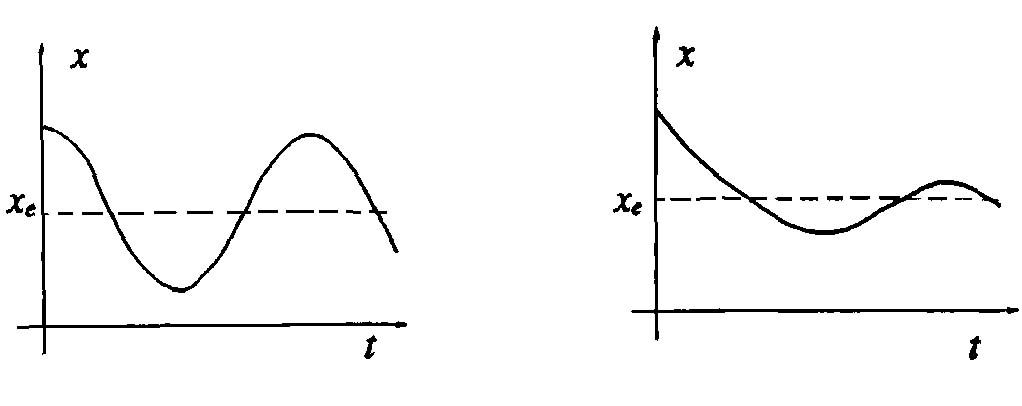
Рис. 3.1. Условия динамического равновесия системы
При k > 0 величина  и x(t) стремится к бесконечности (если начальное состояние не совпадает состоянием равновесия).
и x(t) стремится к бесконечности (если начальное состояние не совпадает состоянием равновесия).
2. Поведение в дискретном времени может быть описано с помощью разностного уравнения, связывающего величины х в соседние моменты времени, то есть  и
и  .
.
Например, в дискретной ситуации, аналогичной уже описанной, может использоваться разностное уравнение

решением которого является

Это решение найдено (аналогично непрерывному случаю) как сумма общего решения
для однородного уравнения
 ,
,
и частного решения
для исходного разностного уравнения (с учётом  при t = 0).
при t = 0).
При k < 0 система в случае уклонения от будет двигаться в направлении , при k > 0 – уходить ещё дальше от него.
Равновесие устойчиво при
– 2 < k < 0
и неустойчиво при
k > 0 или k < – 2
При k < –1 показатель х каждый раз "перескакивает" равновесное значение , причём при k < – 2 показатель х каждый раз "перескакивает" равновесное значение слишком далеко, чтобы приблизиться в конце концов к .
При –1 < k < 0 показатель х стремится к состоянию рвновесия не перескакивая через него.
Ниже приводятся некоторые примеры моделей экономической динамики: модели Вальраса, Самуэльсона, Харрода–Домара, Соллоу.
Дата: 2019-03-05, просмотров: 1021.