Состояние каждой системы описывается дифференциальными уравнениями первого порядка относительно каждой переменной состояния. Эти уравнения в общем случае имеют следующий вид:
 ,
,
 ,
,
.
.
 ,
,
где  . Эту же систему дифференциальных уравнений можно записать в матричной форме:
. Эту же систему дифференциальных уравнений можно записать в матричной форме:
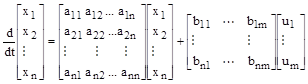
 Матрица –столбец, состоящая из переменных состояния, называется вектором состояния и имеет вид:
Матрица –столбец, состоящая из переменных состояния, называется вектором состояния и имеет вид:
Вектор входных сигналов обозначается как u. Тогда систему можно описать в компактном виде дифференциальным уравнением состояния
 (4)
(4)
Это уравнение часто называют просто уравнением состояния. Матрица  является квадратной размерности
является квадратной размерности  , а матрица
, а матрица  имеет размерность
имеет размерность  . Уравнение состояния связывает скорость изменения состояния системы с самим состоянием и входными сигналами. В общем случае выходные сигналы линейной системы связаны с переменными состояния и выходными сигналами уравнения выхода
. Уравнение состояния связывает скорость изменения состояния системы с самим состоянием и входными сигналами. В общем случае выходные сигналы линейной системы связаны с переменными состояния и выходными сигналами уравнения выхода
 ,
,
где  – совокупность выходных сигналов, представленных в виде вектора –столбца.
– совокупность выходных сигналов, представленных в виде вектора –столбца.
Решение дифференциального уравнения состояния (*) можно получить точно также, как решается скалярное дифференциальное уравнение первого порядка. Рассмотрим уравнение
 ,
,
где  и
и  – скалярные функции времени. Решение будем искать в виде экспоненты
– скалярные функции времени. Решение будем искать в виде экспоненты  . Преобразуем это уравнение по Лапласу, получим:
. Преобразуем это уравнение по Лапласу, получим:
 ,
,
откуда
 .
.
Обратное преобразование Лапласа дает искомое решение:
 .
.
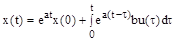
Аналогично получается и решение дифференциального уравнения состояния. Прежде всего, введем в рассмотрение матричную экспоненциальную функцию, представив ее в виде ряда

который сходится для всех конечных  и любой
и любой  .
.  – единичная матрица. Тогда решение уравнения состояния будет иметь вид:
– единичная матрица. Тогда решение уравнения состояния будет иметь вид:
 . (5)
. (5)
Решение этого уравнения можно получить, применив преобразование Лапласа к уравнению состояния (4) и сгруппировав члены. В результате получим:
 ,
,
где можно ввести обозначение  , что является преобразованием Лапласа функции
, что является преобразованием Лапласа функции  . Применив к последней формуле обратное преобразование Лапласа и учитывая, что второе слагаемое в правой части содержит произведение
. Применив к последней формуле обратное преобразование Лапласа и учитывая, что второе слагаемое в правой части содержит произведение  , мы получим решение (5). матричная экспоненциальная функция
, мы получим решение (5). матричная экспоненциальная функция  описывает свободное движение системы и называется фундаментальной матрицей или переходной матрицей состояния.
описывает свободное движение системы и называется фундаментальной матрицей или переходной матрицей состояния.
Таким образом, решение (5) можно записать в виде:
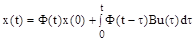 .
.
АНАЛИЗ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ СИСТЕМ УПРАВЛЕНИЯ
Анализ устойчивости
Под устойчивостью системы понимается способность ее возвращаться к состоянию установившегося равновесия после снятия возмущения, нарушившего это равновесие. Неустойчивая система непрерывно удаляется от равновесного состояния или совершает вокруг него колебания с возрастающей амплитудой. Существуют также нейтральные системы, которые после снятия возмущения приходят в состояние равновесия, отличное от исходного. Простейшие модели таких систем показаны на рис. 53.
|
| ||
| а) | б) | в) |
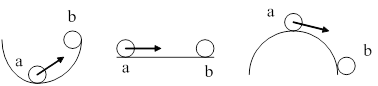
Рис. 53. Модели устойчивой (а), нейтральной (б) и неустойчивой (в) систем.
|
| |
| а) | б) |
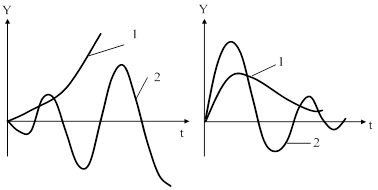
Рис. 54. Графики переходных процессов в неустойчивой (рис. а) и устойчивой (рис. б) системах.
На рис. 54 показаны типичные кривые переходных процессов. Если система неустойчива, то достаточно любого толчка, чтобы в ней начался расходящийся процесс ухода из исходного установившегося состояния. Этот процесс может быть апериодическим (рис. а – кривая 1) или колебательным (кривая 2).
Апериодический расходящийся процесс может, например, возникнуть в САУ, если в ее управляющем устройстве ошибочно переключить полярность воздействия на объект, в результате чего управляющее устройство будет осуществлять не отрицательную, а положительную обратную связь вокруг объекта. При этом управляющее устройство будет не устранять отклонение  , а действовать в обратном направлении.
, а действовать в обратном направлении.
Колебательный расходящийся процесс может наступить, например, при неограниченном увеличении коэффициента передачи системы, вследствие чего управляющее устройство станет излишне энергично воздействовать на объект, стремясь ликвидировать первоначально возникшее отклонение  . В этом случае, при каждом очередном возврате
. В этом случае, при каждом очередном возврате  к нулю под действием управляющего устройства, кривая будет пересекать ось абсцисс все с большей скоростью и процесс в целом будет расходящимся.
к нулю под действием управляющего устройства, кривая будет пересекать ось абсцисс все с большей скоростью и процесс в целом будет расходящимся.
В случае устойчивой системы (рис. б) переходный процесс, вызванный каким-либо воздействием, со временем затухает апериодически (кривая 1) или колебательно (кривая 2) и система вновь возвращается в установившееся состояние.
Т.о. устойчивую систему можно определить также как систему, переходные процессы в которой являются затухающими.
Общее условие устойчивости.
Дата: 2019-02-19, просмотров: 394.