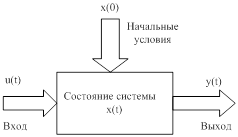
Анализ и синтез систем управления во временной области основан на понятии состоянии системы. Состояние системы – это совокупность таких переменных, знание которых, наряду со входными функциями и уравнениями, описывающими динамику системы, позволяет определить ее будущее состояние и выходную переменную. Для динамической системы ее состояние описывается набором переменных состояния  . Это такие переменные, которые определяют будущее поведение системы, если известно ее текущее состояние и внешние воздействия. Рассмотрим систему, изображенную на рис. 50, где
. Это такие переменные, которые определяют будущее поведение системы, если известно ее текущее состояние и внешние воздействия. Рассмотрим систему, изображенную на рис. 50, где  есть выходные переменные, а
есть выходные переменные, а  – входные переменные. Для этой системы переменные
– входные переменные. Для этой системы переменные  имеют следующий смысл: если в момент времени
имеют следующий смысл: если в момент времени  известны начальные значения
известны начальные значения  и входные сигналы
и входные сигналы  и
и  , то этой информации достаточно, чтобы определить будущие значения всех переменных состояния и выходных переменных.
, то этой информации достаточно, чтобы определить будущие значения всех переменных состояния и выходных переменных.

|
| Рис. 50. Структурная схема системы управления. |
Переменные состояния описывают поведение системы в будущем, если известны текущее состояние, внешние воздействия и уравнения динамики системы.
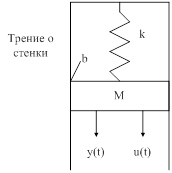
Общий вид динамической системы приведен на рис. 51.
|
| Рис. 51. Динамическая система. |
|
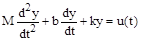
| Рис. 52. Система «масса-пружина» с затуханием. |
Простым примером переменной состояния может служить положение выключателя электролампочки. Выключатель может быть в одном из двух положений – «включено» или «выключено», поэтому его состоянию соответствует одно из двух возможных значений. Если мы знаем, в каком состоянии (положении) находится выключатель в момент времени  , и если мы прикладываем к нему воздействие, то мы всегда можем определить будущее состояние элемента.
, и если мы прикладываем к нему воздействие, то мы всегда можем определить будущее состояние элемента.
Понятие о переменных состояния, описывающих динамическую систему, можно проиллюстрировать на примере механической системы «масса – пружина» с затуханием, изображенная на рис. 52.
Число переменных состояния, выбираемых для описания системы, должно быть по возможности минимальным, чтобы среди них не было излишних. Для данной системы вполне достаточно иметь две переменные состояния – положение и скорость движения массы. Таким образом, мы примем в качестве переменных состояния совокупность  , где
, где
 и
и  .
.
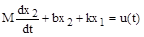
Дифференциальное уравнение, описывающее поведение системы, обычно записывается в виде
 .
.
С учетом введенных выше переменных состояния это уравнение примет вид:
Следовательно, исходное дифференциальное уравнение второго порядка мы можем представить в виде эквивалентной системы двух дифференциальных уравнений первого порядка:
 ,
,  .
.
Эти уравнения по сути описывают поведение системы в терминах скорости изменения каждой переменной состояния.
Дата: 2019-02-19, просмотров: 447.