Автоматизация тралового лова относится к наиболее важным проблемам промышленного рыболовства. Рассмотрим особенности автоматизации наведения трала на облавливаемые концентрации рыб, регулирования размеров и формы устья трала, управления облавливаемыми концентрациями рыбы.
Наведение трала на облавливаемые концентрации рыб. Решение этой задачи связано с изучением маневренных свойств трала и судна, получением и обработкой информации об объекте лова, выбором метода наведения трала на косяки рыб, способа управления тралом и промысловым судном в процессе наведения трала на косяки.
Маневренные свойства судна и особенно трала существенно ограничивают область применения систем наведения трала. Так, переход трала с одного горизонта лова на другой занимает 6— 12 мин. За это время судно проходит расстояние 1000—2000 м, т. е. обычно больше, чем отстояние по горизонтали трала от судна. Поэтому маневр следует начинать заранее.
Информацию об объекте лова получают с помощью гидроакустической аппаратуры с применением различных средств ее обработки и отображения в виде, удобном для восприятия. Для отображения информации обычно используют электронные индикаторы на электронно-лучевой трубке с записью информации символами, линиями, цифрами и текстом. Получаемая с помощью гидроакустических приборов информация служит для обнаружения и распознавания косяка или скопления, выделения их наиболее плотной части, определения глубины погружения, направления и скорости перемещения.
При выборе метода наведения трала, способа управления тралом и судном учитывают особенности перемещения объекта лова, положение трала относительно объекта лова к началу наведения, возможность и целесообразность установки на самом трале измерительных устройств для определения положения объекта лова, дальность действия и точность измерительных устройств, установленных на судне и трале, наличие на самом трале устройств для регулирования положения трала, особенности переходных процессов при изменении положения трала в процессе наведения.
Если на борту судна имеется блок обработки текущих координат объекта лова, то приемлемы дистанционные методы управления тралом. По данным о положении объекта лова относительно трала вырабатывают параметры движения трала, которые обеспечиваются маневрированием судна, длиной ваеров, регулирующими устройствами на трале с учетом принятого метода наведения.
Возможно управление тралом и по методу самонаведения, когда прием, обработка информации об объекте лова, формирование управляющих команд и непосредственно процесс наведения выполняют с помощью аппаратуры и исполнительных механизмов, расположенных на самом трале.
Перспективен комбинированный метод управления тралом, когда самонаведение осуществляется только на последнем этапе наведения, а на более ранних этапах применяют дистанционное управление. Наведение трала возможно на неподвижные концентрации рыб и на концентрации рыб, совершающие горизонтальные и вертикальные миграции, заныривающие косяки.
Каждому из этих случаев соответствуют свои методы наведения. Например, если косяк рыбы совершает горизонтальные миграции, то наиболее эффективно наведение методом погони, когда направление касательной к траектории трала в каждый момент времени проходит через точку нахождения косяка.
Первый этап автоматизации тралового лова состоит в создании систем индикации подводной обстановки в процессе лова. Рассмотрим как пример такую систему норвежской фирмы «Симрад». Система состоит из судового гидролокатора, тралового эхолота, судового лага, гирокомпаса, судового эхолота, прибора индикации. Сбор, обработку и представление информации на цветном дисплее выполняет бортовая ЭВМ. Предусмотрено 4 режима работы системы, в каждом из которых цветное изображение дополняется текстом, цифрами,, символами. Во всех режимах (рис. 36) в верхней части экрана отображается цифровая и буквенная информация о скорости и курсе судна, направлении на трал, его наполнении, температуре воды, географических координатах судна. На дисплее показаны символы судна и трала, контур дна, расстояние от судна до трала по горизонтали, глубина хода трала, вертикальное раскрытие трала, расстояние от трала до дна, глубина в месте лова.
Полная индикация подводной обстановки облегчает маневрирование судном и орудием лова, существенно повышает эффективность лова. Однако системы индикации подводной обстановки не выдают рекомендаций по оптимальному управлению процессом лова (скорости траления, длине ваеров, курсе судна и т. д.).
Второй этап в разработке систем автоматизации тралового лова заключается в создании систем с режимом рекомендаций. Одна из первых подобных систем разработана в Японии фирмой «Nichimo». В нее входят трал, траловая лебедка, главный двигатель, винт регулируемого шага, лаг, приборы контроля параметров трала и окружающей среды, малогабаритная ЭЦВМ.
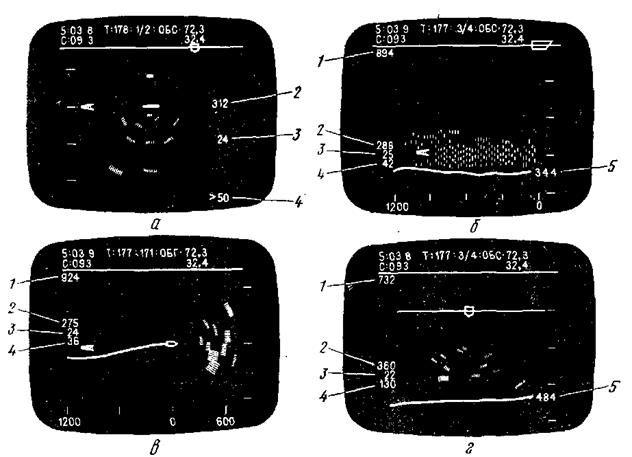
Рис. 84. Дисплей системы индикации подводной обстановки для тралового
лова:
а — поперечное сеченне трала; б — продольное сеченне трала с судном;
в — внд сверху; г — поперечное сеченне судна; 1 — расстояние от судна до трала; 2 — глубина хода трала; 3 — вертикальное раскрытие трала;
4 — расстояние от трала до дна; 5 — глубина в месте лова; с — курс судна;
Т — направление на трал; 1/2 нлн 3/4— степень наполнения трала;
0,6 °С — температура воды; 72,3 — широта места; 32,4 — долгота места
Принцип действия системы основан на том, что если с помощью гидроакустического вибратора концентрация рыб не обнаружена на горизонте хода трала, то трал поднимают или опускают для поиска рыбы на других горизонтах. Глубина хода трала корректируется автоматически по данным ЭВМ изменением длины ваеров и скоростью траления.
Регулирование размеров и формы устья трала. Различие размеров косяков и скоплений рыб, их поведения, плавательной способности, особенностей техники лова делает актуальной задачу регулирования площади устья трала F у, соотношения между F у и скоростью траления υтр, между горизонтальным и вертикальным раскрытием трала. Регулирование возможно на борту судна перед тралением или в процессе траления путем изменения размеров передней части трала, количества плава и груза, регулированием гидродинамических распорных средств и т. д. Так, площадь устья трала можно изменять, например, путем «кошелькования» устья трала. Соотношение между горизонтальным и вертикальным раскрытием регулируют изменением величины и точек приложения сил, действующих на устье трала.
Если изменение формы устья трала в процессе траления обусловлено различием формы и размеров облавливаемых косяков, то сигналом для начала регулирования служат показания гидроакустических приборов. Регулируют по показаниям приборов контроля за горизонтальным и вертикальным раскрытием трала средствами для изменения этих параметров. Конечно, такое регулирование имеет смысл, если оно существенно повышает эффективность лова.
Изменять соотношение между F у и υтр иногда целесообразно при облове редких косяков, когда, уменьшая F у, можно сократить продолжительность перемещения трала между косяками и продолжительность наведения трала. В этом случае необходим контроль за положением косяков и оценка степени регулирования
F у и υтр
Для автоматизации закрытия трала перед его подъемом используют показания приборов наполнения трала.
Частично или полностью закрыть трал можно уменьшением угла атаки траловых досок, значительным увеличением скорости выборки трала, отмеченным выше способом «кошельковаигая» устья трала и т. д. Важно, что закрытие устья трала существенно уменьшает нагрузки на элементы траловой системы, время выборки трала (особенно при глубоководном траловом лове) и сокращает уход рыбы из трала. Известны устройства для закрытия не устья, а мешка трала для уменьшения ухода рыбы.
Управление объектом лова. Наряду с автоматизацией наведения трала на концентрации рыб и изменением параметров устья трала важное значение приобретают задачи автоматизации управления объектом лова. Обычно они связаны со стабилизацией или регулированием положения, размеров и формы облавливаемых концентраций, которые не всегда оптимальны или в процессе лова изменяются в неблагоприятную сторону. Вот некоторые из них: посадка рыбы на грунт в зону облова донным тралом; уменьшение высоты донного скопления до величины вертикального раскрытия трала; остановка подвижного скопления; предотвращение ухода скопления из зоны облова при прохождении над ним судна или при приближении к нему трала; приведение в соответствие формы и размеров косяков в толще воды форме и размерам зоны облова трала; перемещение косяков рыбы в зону облова разноглубинного трала, если их относительное расположение неблагоприятно для последовательного улавливания.
В общем случае автоматизированная система управления объектом лова должна определять положение, параметры перемещения и распределения объекта лова, оценивать, насколько они соответствуют оптимальным, давать команду техническим средствам, предназначенным для оптимизации положения и поведения объекта лова, контролировать и корректировать ход процесса управления.
Автоматизация управления объектом тралового лова требует иногда применения весьма сложных схем и, в частности, управляющих вычислительных машин. Однако некоторые схемы автоматизации могут быть весьма простыми.
Известны и другие задачи автоматизации тралового лова — спуска-подъема трала, управления режимом работы источников физических полей средств интенсификации лова, автоматизации, обеспечивающей непрерывность тралового лова, регулирования угла атаки траловых досок и т. д.
Организация лова
Организация тралового лова зависит от характеристики района промысла и его удаленности от береговых баз, типа судна, вида тралового лова, особенностей поведения и распределения объекта лова. Основными элементами организации тралового лова считают форму организации промысла, годовой, рейсовый, суточный и пооперационный режимы работы судна, работы в соответствии с промысловым расписанием, мероприятия по устранению неисправностей, предупреждению аварийных ситуаций и технике безопасности.
Виды организации. Для тралового, как и некоторых других видов активного морского рыболовства, характерны два вида организации промысла — автономная и экспедиционная.
При автономной организации промысла траулеры сдают рыбу-сырец, полуфабрикат или выработанную ими готовую продукцию непосредственно на берег.
По первому варианту автономной организации лова работают крупные траулеры с мощностью главного двигателя обычно более 1500 кВт. Такие траулеры ловят далее 1000 миль до порта базирования и не только добывают, но и полностью перерабатывают, длительно хранят и транспортируют рыбу в любой порт для реализации. Вместимость трюмов таких судов позволяет им находиться в районе промысла в течение 60—90 сут.
Для наиболее удаленных районов с тяжелыми гидрометеорологическими условиями при работе по этому варианту пригодны супертраулеры с суммарной мощностью энергетических установок до 4000—5000 кВт и грузовместимостью трюмов до 3000— 4000 м3.
По второму варианту автономной работы траулер добывает рыбу и сдает сырец или полуфабрикат на береговую базу для обработки и реализации. Эту форму организации применяют в прибрежном морском рыболовстве при работе с мало- и сред- нетоннажных траулеров. Мощность их силовой энергетической установки колеблется в основном от 50 до 1000 кВт. Иногда такой вид организации автономного лова применяют и в океаническом рыболовстве, если без ущерба для качества рыбу можно перерабатывать на береговых предприятиях. Продолжительность рейса не превышает 2—3 сут при доставке в порт свежей рыбы и 10—13 сут при доставке в порт охлажденной рыбы. Продолжительность рейса посольных траулеров зависит лишь от вместимости трюмов и автономности плавания судна.
По третьему варранту автономной организации лова работают приемно-перерабатывающие суда с добывающими судами на борту. Прибыв в район промысла, приемно-перерабатывающее судно спускает на воду добывающие суда, которые занимаются ловом ярусами, ловушками или другим видом лова. Оно же принимает улов и перерабатывает его в готовую продукцию. Судно-база имеет все необходимое для ведения промысла и располагает вместительными рефрижераторными трюмами для хранения рыбной продукции.
При экспедиционной организации лова траулеры сдают в море сырец, полуфабрикаты или выработанную ими рыбную продукцию перерабатывающим или транспортным судам для последующей обработки и транспортирования на берег. Экспедиционная организация лова также предусматривает несколько вариантов работы траулеров.
По первому варианту добывающее судно после заполнения трюмов сдает рыбную продукцию на транспортное судно. Такая форма организации применяется при работе траулеров в районах промысла, которые удалены от портов базирования или баз реализации продукции на расстояние более 1000—1500 миль для морозильно-свежьевых траулеров, более 1500—2000 миль для больших морозильных траулеров и более 2000—3500 миль для рыболовных морозильных супертраулеров. При высоких устойчивых уловах этот вариант экспедиционного лова оказывается более оперативным и экономически эффективным, чем варианты автономного промысла для аналогичных типов судов.
В качестве транспортных судов обычно используют крупные быстроходные рефрижераторные суда. Такие суда не только принимают рыбную продукцию, но и обычно снабжают рыболовные траулеры топливом, водой, провизией, промысловым снаряжением, а также частично заменяют экипаж.
По второму варианту экспедиционного лова добывающее судно сдает сырье или полуфабрикат перерабатывающему судну, которое вырабатывает готовую продукцию и транспортирует ее на берег для реализации. Такой вариант экспедиционного лова наиболее пригоден для среднетоннажных траулеров. Помимо приема от добывающих судов рыбы и ее обработки, базы доставляют на рыболовные суда необходимое снабжение, обеспечивают культурно-бытовое и санитарное обслуживание экипажей добывающих судов.
По третьему варианту в отличие от второго предусматривается использование транспортных рефрижераторных судов, которые получают рыбную продукцию от перерабатывающих судов и доставляют ее на берег. На малых расстояниях от места лова до порта используют рефрижераторы небольшой грузоподъемности, а на больших расстояниях — крупнотоннажные суда. Третий вариант более удобен, чем второй, когда многочисленный персонал перерабатывающего судна простаивает во время перехода на промысел.
Обе рассмотренные формы организации тралового промысла — автономная и экспедиционная — имеют достоинства и недостатки. Применение той или иной формы организации зависит от многих причин. Ее выбирают прежде всего из экономических соображений.
Возможна также автономно-экспедиционная форма организации, когда суда работают по автономной или экспедиционной форме в зависимости от промысловой обстановки, сезона лова или хозяйственной необходимости.
Режим работы. Годовой режим работы траулеров складывается из переходов к месту лова и обратно, промыслового времени, межрейсовых стоянок, планового ремонта. Время на переходы к месту лова и обратно в течение года зависит от формы организации лова, степени удаленности района промысла от береговой базы и скорости судна. Стремление к уменьшению времени на переходы привело к широкому распространению экспедиционного лова, подмене команды в море, ремонту судов в ближайших портах, в том числе иностранных.
Промысловое время включает работу с орудием лова, переходы из одного квадрата в другой и поиски рыбы, простои из-за ремонта судна, орудия лова, штормовой погоды и др.
Межрейсовые стоянки используют для выгрузки рыбной продукции, уборки трюмов, межрейсового ремонта, погрузки топлива, воды, продуктов, промыслового снаряжения. Время межрейсовых стоянок сокращают путем улучшения организации и повышения уровня механизации погрузочно-разгрузочных работ, сокращения объема и сроков ремонта в этот период и т. д.
В среднем время межрейсовых стоянок, планового ремонта и другое внеэксплуатационное время на траловом лове составляет 25—30%, а время на лову — 50—65% календарного времени.
Рейсовый режим работы траулера включает те же элементы, что и годовой, кроме межрейсовых стоянок и планового ремонта. В среднесуточном рейсовом режиме нет также времени на переходы (т. е. расписано лишь промысловое время).
Пооперационный режим показывает распределение времени на выполнение операций лова за цикл лова. В табл. 4 приведены среднестатистические данные о распределении времени іц цикла лова при работе донными и разноглубинными тралами.
Таблица 2. Пооперационный режим траулеров
| Промысловые операции | Донные тралы | Разноглубинные тралы | ||
 , ч , ч
| 
| , ч
|
| |
| Поиск рыбы | 0,35 | 10 | 0,45 | 19 |
| Спуск трала | 0,32 | 9 | 0,10 | 4 |
| Траление | 1,15 | 43 | 1,17 | 48 |
| Выборка трала | 0,42 | 12 | 0,17 | 7 |
| Выливка улова и подготовка к новому тралению | 0,92 | 26 | 0,53 | 2.2 |
| Промысловый цикл | 3,50 | 100 | 2,42. | 100 |
Совершенствование организации тралового лова сводится к максимальному увеличению времени работы с орудием лова. Этого достигают улучшением работы промысловой разведки и разведки рыбы самим судном, повышением качества обслуживания и профилактического ремонта орудий лова, промыслового и другого оборудования на судне, сокращением времени планового ремонта, на погрузочно-разгрузочные и другие вспомогательные работы в море и на межрейсовых стоянках.
Аварийные ситуации. К аварийным ситуациям при траловом лове относятся заверт трала, обрыв ваеров или кабелей, намотка на винт сетей, попадание груза-углубителя на верхний кабель, крупные порывы сетных пластин и канатной оболочки трала.
Заверты трала или отдельных его частей возможны, когда ваер или кабель оказались наброшенными на распорную доску другого ваера, когда перекручены ваера, мешок трала задел за подборы и т. п. Такие аварийные случаи предупреждают соблюдением правил работы с тралом и своевременным контролем состояния трала во время его спуска.
Ваера и кабели рвутся в основном при задевах о грунт и сцеплении тралов. Трал задевает за грунт при попадании на подводные препятствия (скалы, камни и т. п.), врезании распорных досок в грунт, во время посадки трала на дно при тралении. Во время траления в группе судов на пересекающихся курсах возможно сцепление тралов. Подобные аварийные случаи предупреждают и устраняют в соответствии с правилами, подробно изложенными в упомянутых инструкциях и наставлениях. Задев или сцепление почти всегда сопряжены с резким увеличением нагрузок и нарушением симметричности траловой системы. Поэтому после задева или сцепления обязательно проверяют длину ваеров, лапок досок, исправность других частей трала.
Грузы-углубители разноглубинных тралов попадают на верхние кабели при неаккуратном спуске трала. Это резко снижает вертикальное раскрытие трала, и необходимо сразу после обнаружения этого явления трал поднять. Чтобы избежать аварии, верхние кабели при спуске трала следует поднимать (поддерживать) какими-либо подъемными средствами.
Крупные порывы сетного полотна и канатной оболочки трала возможны в основном при резком торможении барабанов лебедки в конце травления ваеров и при работе у грунта. Повреждения при резком торможении барабанов лебедки часто занимают большую площадь, и иногда требуется замена пластин и даже всего трала. Чтобы избежать этого, перед окончанием травления ваеров барабаны лебедки необходимо тормозить плавно. При работе у грунта размеры порыва могут быть различными. Сложность вызывает ремонт участка сетного полотна в месте соединения двух пластин с неодинаковым размером ячей. Обычно в этом случае пластины разъединяют, отдельно их чинят, а затем съячеивают.
При очень больших повреждениях сетных пластин поврежденную часть трала не ремонтируют, а вырезают и на ее место вшивают новую.
Уход за орудиями лова. В процессе лова возможны неисправности и отказы трала, которые влияют на эффективность лова. К 'ним относятся порывы сетного полотна и канатной оболочки трала, вытяжка, в том числе перекос сетного полотна, порывы сетного полотна, потеря плавучести кухтылей, перекос трала при вытяжке ваеров, переползание и порывы посадочной нитки, порывы элементов оснастки и остропки и т. д.
Небольшие порывы сетного полотна возможны в любой части трала. После подъема трала порванную часть растягивают на палубе и определяют характер повреждений. Порывы чинят путем надвязки или вставки кусков дели прямоугольной или фигурной формы.
В результате вытяжки дели под нагрузкой и при намокании образуются излишки дели. Они вызывают объячеивание рыбы, порывы сетных пластин, изменение горизонта хода трала и т. д. Для ликвидации «пузырей» удлиняют топенанты так, чтобы все топенанты имели одинаковую длину. Вытяжку дели двухрядного мешка трала устраняют, вырезая участки сетного полотна каркаса и одновременно укорачивая рубашку.
Перекосы сетного полотна возникают при циркуляции судна, неравномерности травления и выборки ваеров, поворотах с новым тралом во время траления, выливке больших уловов, задевах и сцеплении тралов, намокании посадочного троса и т. п. Для предупреждения перекосов разработаны специальные рекомендации, подробно изложенные в инструкциях и наставлениях по траловому лову. Например, циркуляцию судна при спуске и подъеме трала выполняют «а среднем и малом ходу; новым тралом рекомендуют сделать 3—4 траления на постоянных курсах; удавный строп при подъеме кутка с рыбой на палубу судна опускают до уровня воды и т. п. Все эти меры направлены на повышение равномерности распределения нагрузок по сетному полотну.
Кухтыли теряют плавучесть в основном при работе на больших глубинах. Для обнаружения заполненных водой кухтылей их регулярно проверяют, обстукивая металлическим предметом.
Перекос трала в результате вытяжки ваеров ликвидируют путем регулирования их длины в процессе лова.
Другие неисправности устраняют известными в практике тралового лова способами.
Кроме неисправностей и отказов в результате износовых явлений и неправильной эксплуатации тралов, в процессе тралового лова возникают неисправности и отказы, обусловленные дефектами конструкции и настройки элементов траловой системы. К ним относятся разность горизонтов хода и малые углы атаки траловых досок, скручивание голых концов и канатных связей в крыльях, большой угол атаки, полоскание и заверт гидродинамических распорных щитков, неполное раскрытие трала, перекос всего трала вокруг продольной оси, неправильная посадка дели, значительная слабина топенантов в мотенной части трала, слабая продуваемость мешка и чрезмерные колебания его концов, разворот мешка вокруг продольной оси или скручивание его в жгут и т. д. Обычно отмеченные неисправности и отказы можно установить лишь с помощью подводных наблюдений и устранить перенастройкой трала.
Техника безопасности. При организации тралового лова большое внимание уделяют соблюдению «Правил техники безопасности на судах флота рыбной промышленности СССР». В этих Правилах и в специальных инструкциях изложены безопасные приемы работы на траловом лове с различных типов судов с учетом особенностей способа лова, оснастки трала и промыслового оборудования.
Во время работы с тралом возможны несчастные случаи, вызванные обрывом ваера, резким колебанием распорной доски, отрывом подвесного блока и т. п. Особую осторожность соблюдают при работе на задевистых грунтах, когда обрыв ваеров наиболее вероятен.
Серьезное внимание обращают на правила техники безопасности при работе с лебедками. При подготовке лебедки к спуску трала проверяют исправность ее отдельных деталей и узлов, особенно органов управления лебедкой. У лебедок с электрическим приводом проверяют исправность автоматов защиты электропривода, выключателей электромагнитных тормозов, защитное заземление электроприводов. В процессе выборки ваеров и других тяговых органов следят за тем, чтобы вблизи тяговых органов не было людей. Лебедки останавливают не только при обнаружении явной неисправности, но и по команде «стоп», от кого бы эта команда ни исходила. К обслуживанию лебедок допускаются лица, прошедшие специальное обучение и инструктаж непосредственно у лебедки.
Дата: 2018-12-21, просмотров: 1591.