Решение:
Анализируем графическое условие задачи:
заданная плоскость занимает общее положение в пространстве. Следовательно, для определения натуральной величины плоскости треугольника необходимо осуществить два преобразования:
1. Преобразовываем заданную плоскость в проецирующую.
2. Преобразовываем заданную плоскость в плоскоть уровня.
Порядок выполнения графической части задачи (рис. 108):
1. Так как по условию задачи необходимо найти угол наклона плоскости треугольника к горизонтальной плоскости проекций, заданную плоскость преобразуем во фронтально проецирующую. Условия ввода плоскости V1: V1 ⊥ H, V1 ⊥ ∆DВ A.
1.1. Анализируем положение отрезков прямых, которыми задана плоскость треугольника: все они занимают общее положение.
1.2. Проводим в заданной плоскости горизонталь А N .
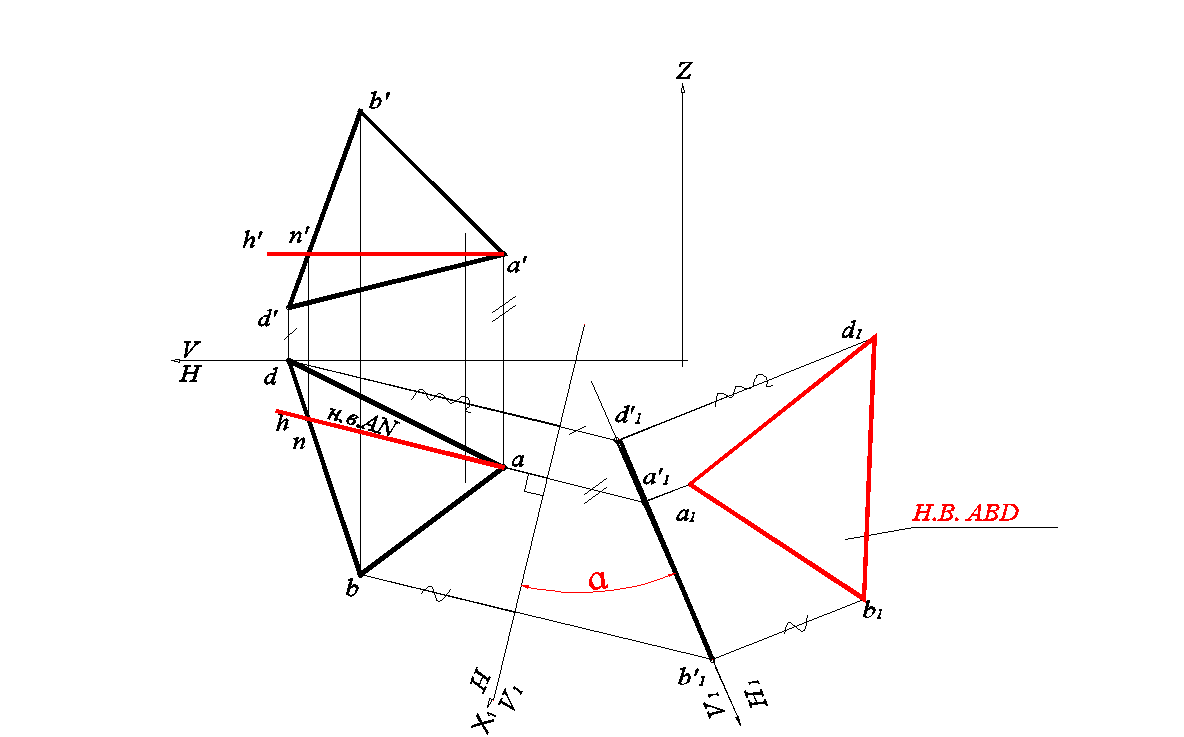
Рис. 108. Определение натуральной величины плоскости ∆АВ D
1.3. Перпендикулярно горизонтальной проекции горизонтали проводим новую ось проекций Х1 на любом расстоянии от точки А.
1.4. Откладываем от оси Х1 координаты ZD, ZB, ZC вдоль линии связи точек В, С и D.
1.5. Получаем проекцию плоскости ∆DВ A в виде прямой линии.
1.6. На новую плоскость проекций V1 плоскость ∆DВ A отобразилась в впрямую линию, т. е. стала фронтально проецирующей плоскостью. На новой плоскости проекций V1 угол наклона плоскости треугольника DВ A к горизонтальной плоскости проекций α отображен без искажения.
2. Для построения натуральной величины плоскости треугольника преобразовываем ее в горизонтальную плоскость уровня.
2.1. Вводим новую плоскость проекции Н1: V1 ⊥ H1, Н1 || ∆DВ A.
2.2. Ось проекции X2 – горизонтальный след плоскости Н1. Проводим параллельно прямой b1′d1′a1′ ось X2 на любом расстоянии от нее.
2.3. Проводим из точек b1′, d1′, a1′ линии связи (перпендикуляры к оси X2).
2.4. Откладываем расстояния от точек а, b и d до оси Х1 по линиям связи этих точек от X2 соответственно точкам A, B, D.
2.5. Получаем точки a1, b1, d1. Соединяя полученные точки, получим новую проекцию плоскости ∆DВ A равную натуральной величине ∆DВ A .
Следовательно, в новой системе плоскостей плоскость занимает положение горизонтальной плоскости уровня.
Метод вращения
Суть метода заключается в том, что геометрический элемент вращается (перемещается) относительно неподвижных плоскостей проекций, занимая необходимое частное положение. Каждая точка вращаемого элемента перемещается в плоскости (плоскость вращения) перпендикулярной к некоторой неподвижной прямой (оси вращения) по окружности, центр которой находится в точке пересечения оси с плоскостью вращения (центр вращения), а радиус окружности равняется расстоянию от вращаемой точки до центра (радиус вращения).
Итак, для применения способа вращения в целях преобразования чертежа отметим следующие четыре элемента (рис. 109): ось вращения MN; плоскость вращения точки S ┴ MN; центр вращения S ∩ MN = О; радиус вращения R = | OA |.
|
|
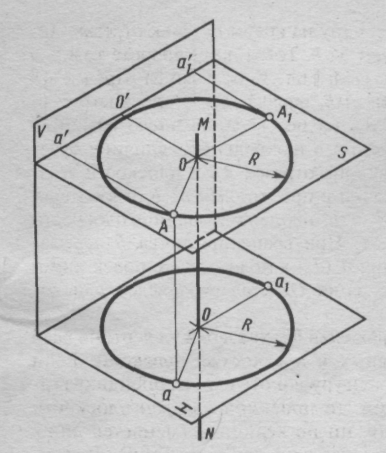
Рис. 109. Вращение точки вокруг оси
В качестве оси вращения обычно используют прямые, перпендикулярные или параллельные плоскостям проекций. Кроме того, ось может быть задана или выбрана, указана или нет. В зависимости от этого рассматривают различные способы:
– вращение вокруг оси, перпендикулярной к плоскости проекций;
– вращение без указания осей вращения или плоскопараллельное перемещение;
– вращение вокруг прямых, параллельных плоскости проекций;
– вращение плоскости вокруг следа (метод совмещения).
Дата: 2018-11-18, просмотров: 1276.