4.10.1. Преимущество графического метода заключается в наглядности и простоте. Он хорош для кинематического анализа звеньев, совершающих возвратно-поступательное движение. Недостаток метода – невысокая точность, которая зависит от точности графических построений.
4.10.2. Графоаналитический метод называют методом планов скоростей и ускорений. Особенности этого метода по сравнению с графическим: он менее трудоемок, так как позволяет определять скорости и ускорения (их величину и направление) на одном плане скоростей или плане ускорений для множества точек механизма. Однако, если необходимо определять скорость и ускорение при различных положениях механизма, то требуется построить планы скоростей и ускорений для нескольких положений механизма.
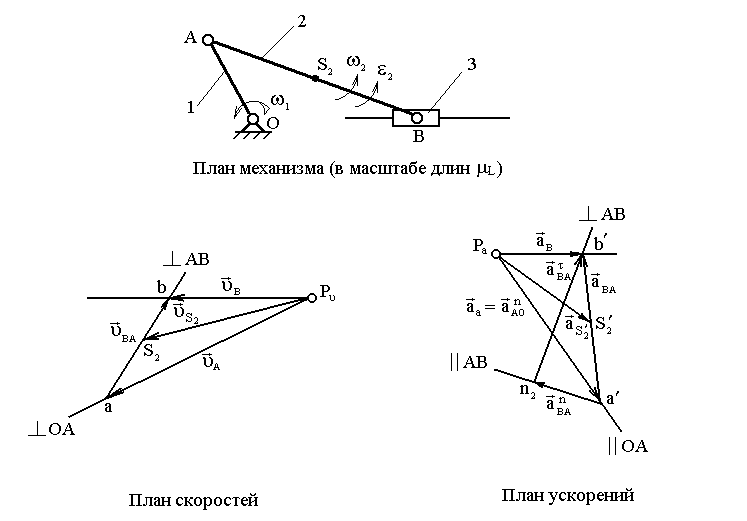
Рис.94. Пример графоаналитического метода кинематического анализа
Кривошипно-шатунного механизма
4.10.3. Аналитический метод по сравнению с графическим и графоаналитическим методами кинематического анализа механизмов является более точным и менее трудоемким. Но при этом необходимо составлять достаточно сложные аналитические зависимости (формулы) и иметь возможность решать их с использованием компьютерных техники и технологии.
Методы аналитического исследования: метод замкнутых векторных контуров (метод Зиновьева) удобен для кинематического анализа практически всех используемых в технике несложных рычажных механизмов; метод преобразования координат (метод Морошкина) удобен для кинематического анализа многозвенных механизмов типа манипуляторов промышленных роботов.
Коротко рассмотрим суть аналитического метода. Положение любого звена механизма может определяться параметрами: углом  относительно какой-либо координатной оси или координатами ХК и Y К.
относительно какой-либо координатной оси или координатами ХК и Y К.
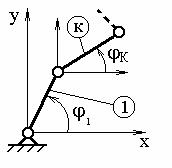
Рис.95. Схема механизма
Функция положения - это аналитическая зависимость положения или координаты К-го звена ( , ХК или YК ) от положения ведущего звена  , т.е.
, т.е.  или
или  и
и  , где
, где  , XK и YK – координаты, определяющие положение К-го звена (ведомого), а угол – угол, характеризующий положение ведущего звена.
, XK и YK – координаты, определяющие положение К-го звена (ведомого), а угол – угол, характеризующий положение ведущего звена.
Аналог скорости. Угловая скорость К-го звена определяется зависимостью
 ,
,
где  - аналог скорости К-го звена (первая передаточная функция) для вращающегося звена, величина безразмерная;
- аналог скорости К-го звена (первая передаточная функция) для вращающегося звена, величина безразмерная;
 и
и  - аналоги скорости К-го звена, движущегося поступательно, величины безразмерные.
- аналоги скорости К-го звена, движущегося поступательно, величины безразмерные.
Аналог ускорения. Угловая скорость К-го звена определяется зависимостью, получаемой дифференцированием уравнения ( ) по dt:
 ,
,
При дифференцировании предполагается, что угловая скорость К-го звена  определяется зависимостью:
определяется зависимостью:
 ,
,
а угол является функцией угла :
 ,
,
Величина  - аналог ускорения К-го звена, совершающего вращательное движение, величины
- аналог ускорения К-го звена, совершающего вращательное движение, величины  и
и  – аналоги ускорения К-го звена, двигающегося поступательно, в проекциях на оси X и Y.
– аналоги ускорения К-го звена, двигающегося поступательно, в проекциях на оси X и Y.
Введение в кинематический анализ понятий аналогов отделяет геометрические свойства механизма от кинематических.
Величину  называют еще передаточным отношением, так как выражение можно преобразовать, умножив и разделив его на величину dt:
называют еще передаточным отношением, так как выражение можно преобразовать, умножив и разделив его на величину dt:
 ,
,
Отношение угловых скоростей в механике называют передаточным отношением:
 ,
,
Аналог скорости звена также называют первой передаточной функцией.
Задачи кинематического анализа и пути их аналитического решения приведены в таблице 1.
Таблица 11.
Дата: 2019-02-25, просмотров: 654.