Выбор типа электродвигателя
1. Выбираем типовой график рабочих нагрузок для наиболее энергоёмкой операции, предназначенной для выполнения на разрабатываемом прессе. Такой операцией является операция гибки. Типовым графиком для неё служит график, изображённый на рис. 4.8.
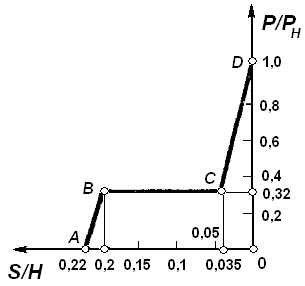
Рис. 4.8 Типовой график рабочих нагрузок для операции гибки
2. Находим абсолютные значения координат характерных точек графика А, B, C и D. Для этого умножаем относительные значения абсцисс и ординат этих точек А(0,22; 0), B(0,2; 0,32), C(0,035; 0,32) и D(0; 1,0) соответственно на Н=130 мм и Р=1000 кН. В результате получим следующие значения перемещений ползуна S и сил деформирования P, соответствующим этим точкам:
SA = 0,22Н=0,22·130=28,6 мм;
S В = 0,2Н=0,2·130=26,0 мм;
S С = 0,035Н=0,035·130=4,55 мм;
SD = 0;
РА = 0;
РВ = 0,32РН =0,32·1000=320 кН;
РС = 0,32РН =0,32·1000=320 кН;
Р D = 1,0РН =1,0·1000=1000 кН.
3. Соединив эти точки прямыми линиями, получаем график рабочих нагрузок для операции гибки. График показан на рис. 4.9. Полученный график не учитывает упругую деформацию пресса.
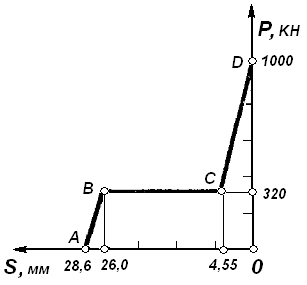
Рис. 4.9 График рабочих нагрузок для операции гибки
4. Построим суммарный график рабочих нагрузок (с учётом упругой деформации пресса). Для этого сначала определяем коэффициент жёсткости С для разрабатываемого типа пресса. По табл. 3.5:
 кН/мм
кН/мм
Затем по формуле (3.17) рассчитываем приращение хода ползуна (за счёт упругой деформации пресса) для каждой из точек А, B, C и D, т.е. определяем величину смещения абсцисс этих точек вправо (отрицательное приращение) по оси абсцисс. Увеличение нагрузки идёт в сторону, противоположную направлению оси «0S», поэтому и упругое удлинение элементов пресса также идёт в сторону, противоположную направлению оси «0S». Таким образом, присвоив упругому приращению абсцисс точек А, B, C и D отрицательный знак, получаем:
ΔlA = –Р A /С = –0/500=0;
Δl В = –РВ /С = –320/500= – 0,64 мм;
Δl С = –РС /С = –320/500= – 0,64 мм;
ΔlD = –Р D /С = –1000/500= –2,00 мм;
Далее по формуле (3.15) определяем абсциссы точек А, B, C и D с учётом упругой деформации пресса и строим соответствующий график (см. рис. 4.10):
S У A = SA + ΔlA =28,6–0=28,6 мм;
S УВ = S В + Δl В =26,0–0,64=25,36 мм;
S УС = S С + Δl С =4,55–0,64=3,91 мм;
S У D = S D + Δl D =0–2,0= –2,0 мм;
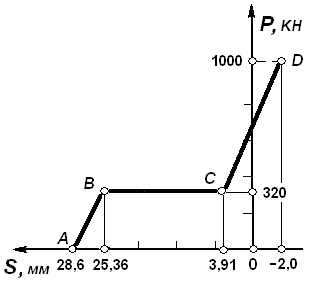
Рис. 4.10 График рабочих нагрузок с учётом упругой деформации пресса
Поместив начало координат полученного графика в точку (0; –2), получаем искомый суммарный график рабочих нагрузок P =P(S) для разрабатываемой кривошипной машины (рис. 4.11).
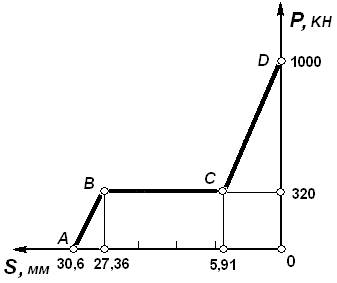
Рис. 4.11 Суммарный график рабочих нагрузок
5. Преобразуем полученный суммарный график рабочих нагрузок Р=Р(S) в график P =P(α). Для этого на суммарном графике рабочих нагрузок нужно значения перемещений Si (0; 5,91; 27,36; 30,6) заменить на значения углов поворота кривошипа αi, которые соответствуют значениям Si. Эта связь определена графиком зависимости S=S(α) (см. рис. 4.1). Для определения значений αi, соответствующих значениям Si можно применить методом итераций (постепенных приближений к искомому результату), а именно: в ячейке с некоторым углом αx (кратным 10º), который соответствует величине Sx, близкой к Si, изменять значениями угла до тех пор, пока в соответствующей ячейке c изменяющимися значениями S не выполнится условие S = Si. Полученное при этом значение угла α* и будет искомым значением αi, т.е. αi = α*. Найденными значениями углов αi для значений Si являются соответственно углы: 0º; 23,4º(0,40841); 52,4º(0,91455); 55,7º(0,97215). После определения всех значений αi, соответствующих значениям Si, строим график P=P(α), изображённый на рис. 4.12.
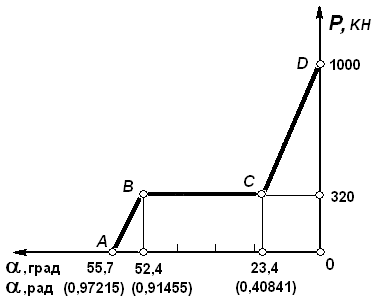
Рис. 4.12 График зависимости PD =PD(α)
6. Определяем работу A Р, для чего рассчитываем по формуле (3.14) значения M В и строим график зависимости M В=M В(α). Значения P берём из графика зависимости P=P(α) (см. рис. 4.11), значения m K – из графика зависимости m K = m K(α) (см. рис. 4.4 и 4.5). Для определения значений m K необходимо воспользоваться рабочим листом Excel с расчётами m K . Подставив в ячейку столбца А значение угла αi, получаем искомое значение m K. Данные для построения графика M В= M В(α) помещаем в табл. 3.6. Полученный график M В= M В(α) показан на рис. 4.13.
Таблица 3.6
| S, мм | P, кН | α, град | α, рад | m к, м | MB, кН·м |
| 30,60 | 0 | 55,7 | 0,97215 | 0,06230 | 0 |
| 27,36 | 320 | 55,4 | 0,91455 | 0,06031 | 19,30 |
| 5,91 | 320 | 23,4 | 0,40841 | 0,03387 | 10,84 |
| 0 | 1000 | 0 | 0 | 0,00576 | 5,80 |
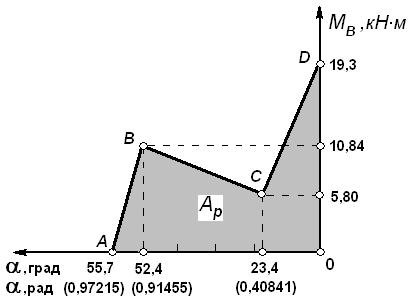
Рис. 4.13 График зависимости M В= M В(α)
Рассчитав площадь под полученным графиком (при этом значения углов α принимаются в радианах), получаем величину работы A Р, совершаемой прессом за время рабочего хода: A Р = 9,65 кДж.
7. По формуле (3.13) рассчитываем работу пластической деформации А ПЛ, предварительно определив по табл. 3.4 коэффициент полноты технологической операции δ. Принимаем δ=0,04, тогда:
А ПЛ = 0,04·1000·0,13=5,2 кДж
8. По формуле (3.11) и (3.12) определяем работу холостого хода А ХХ и работу на разгон и включение муфты (А РАЗ + А М)/η М. Коэффициенты a и b принимаем соответственно равными 0,8 и 0,5 (см. табл. 3.3). Тогда:
А ХХ = 0,8·5,2=4,16 кДж
(А РАЗ + А М)/η М = 0,5·5,2=2,60 кДж
9. Работу А ОД, совершаемую прессом за цикл одиночного хода определяем по формуле (3.9):
А ОД = 9,65+4,16+2,60=16,41 кДж
10. По табл. 3.2 определяем коэффициент использования числа ходов, р=0,4.
11. Число одиночных ходов ползуна в минуту определяем по формуле (3.7):
n ОД =0,4·80=32 об/мин
12. По формуле (3.8) рассчитываем время цикла:
t Ц = 60/32=1,88 с
13. По таблице 3.1 определяем коэффициент запаса k, принимаем k =1,5.
14. По формуле (3.6) рассчитываем потребную (расчётную) мощность электродвигателя (кВт):
N =1,5·16,41/1,88=13,1 кВт
По каталогу [9, с.898] выбираем асинхронный трёхфазный электродвигатель с короткозамкнутым ротором типа АИР160S4 со следующими параметрами: номинальная мощность N ЭД =15,0 кВт; синхронная частота вращения n С =1500 об/мин; номинальная частота вращения n ЭД =1460 об/мин. Номинальное скольжение двигателя s Н составляет:
sН =(nС – nЭД)/ nС = (1500–1460)/1500= 0,027
Дата: 2019-02-02, просмотров: 705.