ЛЕКЦИЯ 27. Общие сведения о механических передачах. Кинематическая цепь. Расчёт кинематических цепей.
Механическая передача – это устройство, предназначенное для передачи мощности от источника (двигателя) к рабочему органу.
Основные причины применения передач следующие:
1. Требуемые скорости рабочих органов машины часто не совпадают со скоростями стандартных двигателей,
2. Скорости рабочего органа машины часто необходимо изменять в процессе работы.
3. Большинство рабочих органов машин должны работать при малых скоростях, а высокооборотные двигатели экономичнее.
4. Двигатели изготавливают для равномерного вращательного движения, а в машинах иногда требуется прерывистое поступательное движение с изменяющимися скоростями.
По способу передачи мощности механические передачи бывают:
1) Передачи трением – к ним относятся фрикционные и ременные передачи.
2) Передачи с зацеплением – к ним относятся зубчатые и цепные передачи.
3) Передачи трением с зацеплением – к ним относятся червячные передачи и передача винт-гайка.
Механические передачи имеют 2 звена:
1) Ведущее звено (оно принимает мощность).
2) Ведомое звено (оно следует за ведущим).
У механической передачи существует 2 характеристики:
1) Передаточное число: 
 - скорость вращения ведущего звена.
- скорость вращения ведущего звена.
 - скорость вращения ведомого звена.
- скорость вращения ведомого звена.
Если передаточное число больше 1, передача называется понижающей; если передаточное число меньше 1, передача называется повышающей; если передаточное число равно 1, передача не изменяет скорости вращения.
Коэффициент полезного действия: 
 - мощность на ведомом звене.
- мощность на ведомом звене.
 - мощность на ведущем звене.
- мощность на ведущем звене.
Коэффициент полезного действия всегда меньше 1.
Совокупность передач, передающих мощность от источника к рабочему органу, образует кинематическую цепь.
Её изображение на бумаге называется кинематической схемой. Кинематическая схема изображается с помощью условных изображений (рисунок 22).


Электродвигатель. На валу, установленном в под- Концы валов соединены
шипниках, расположено звено, при помощи муфты:
вращающееся вместе с валом. а – компенсирующей,
б – предохранительной.

Открытая ремённая передача: Открытая цепная передача. Закрытая зубчатая пере-
а – клиновым ремнём; дача цилиндрическими
б – плоским ремнём. прямозубыми колёсами.



Закрытая зубчатая передача Закрытая зубчатая передача Закрытая зубчатая
цилиндрическими косозубыми цилиндрическими шевронными передача коничес-
колёсами. колёсами кими колёсами.
Рисунок 22. Некоторые условные обозначения на кинематических схемах.
Рассчитать кинематическую цепь – это значит по заданной мощности и скорости рабочего органа необходимо:
1) Подобрать электродвигатель.
2) Определить передаточные числа всех передач.
3) Определить мощности на всех валах цепи.
4) Определить скорости вращения всех валов цепи.
5) Определить вращающие моменты на всех валах цепи.
Таблица 13. КПД и передаточные числа механических передач [10].
| Передача | КПД η | Передаточное число u |
| Зубчатая в закрытом корпусе (редуктор) цилиндрическими колёсами коническими колёсами | 0,97…0,98 0,96…0,97 | 3…6 2…4 |
| Цепная передача | 0,9…0,95 | 3…6 |
| Ремённая передача плоским ремнём Ремённая передача клиновым ремнём | 0,96…0,98 0,95…0,97 | 2…4 2…4 |
| Пара подшипников качения | 0,99…0,995 | - |
ПРИМЕР РАСЧЁТА КИНЕМАТИЧЕСКОЙ ЦЕПИ.
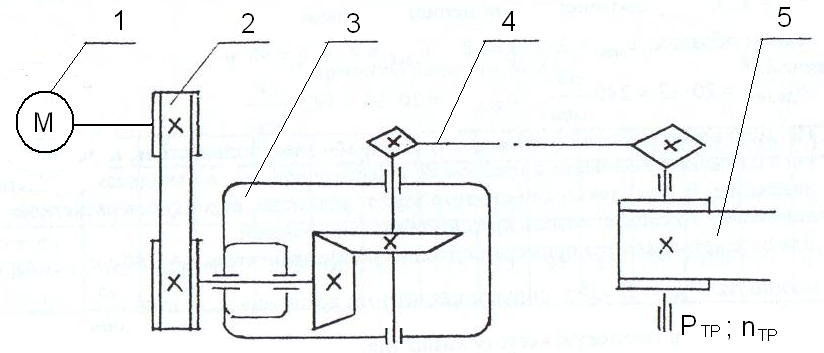
Рисунок 23. Кинематическая схема.
1. Электродвигатель; 2. Открытая ремённая передача плоским ремнём; 3. Конический зубчатый редуктор; 4. Открытая цепная передача; 5. Рабочий орган (ленточный транспортёр).
РЕШЕНИЕ.
Заданная кинематическая цепь состоит из трёх механических передач (открытой плоскоремённой, закрытой зубчатой коническими колёсами, открытой цепной), четырёх валов и трёх пар подшипников.
1 Подбираем электродвигатель:
1.1. по мощности: 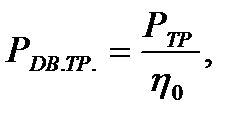 где
где  - общий КПД кинематической цепи.
- общий КПД кинематической цепи.
ηР = 0,95 – КПД ремённой передачи; ηЗ = 0,96 – КПД конического редуктора; ηОП = 0,9 – КПД цепной передачи; ηП = 0,99 – КПД одной пары подшипников качения Взяты из таблицы 13, учитывая худший вариант, т. е. наименьшими.
Итак,  кВт.
кВт.
1.2. по частоте вращения:  , где u – общее передаточное число кинематической цепи, которое определяется с учётом рекомендуемых минимальных и максимальных передаточных чисел механических передач, составляющих кинематическую цепь (таблица 13).
, где u – общее передаточное число кинематической цепи, которое определяется с учётом рекомендуемых минимальных и максимальных передаточных чисел механических передач, составляющих кинематическую цепь (таблица 13). 
 об/мин;
об/мин;  об/мин.
об/мин.
По каталогу двигателей (таблица 14) выбираем электродвигатель, мощность которого ближайшая большая к требуемой, а частота вращения находится в расчётном диапазоне. В том случае, если несколько частот вращения находится в расчётном диапазоне, следует отдать предпочтение наибольшей.
Для рассматриваемого примера подходит электродвигатель 4А180S4, у которого мощность РДВ.= 22 кВт, синхронная частота вращения nC = 1500 об/мин. Фактическая частота вращения вала электродвигателя составит:  об/мин.
об/мин.
s = 0,02 – коэффициент скольжения (таблица 29).
2. Определяем передаточные числа всех передач кинематической цепи.
2.1. Определяем общее передаточное число кинематической цепи: 
2.2 Методом подбора разбиваем общее передаточное число между передачами. При этом, передаточные числа конического редуктора и цепной передачи принимаем целыми числами, лежащими в рекомендуемых диапазонах: uЗ = 4, uЦ = 5. Тогда передаточное число ремённой передачи  - лежит в рекомендуемом диапазоне (таблица 13).
- лежит в рекомендуемом диапазоне (таблица 13).
3. Определяем мощности на всех валах кинематической цепи:

Расчёт считается удовлетворительным, если разница между заданным и расчётным значениями мощности вала рабочего органа (Р4) не превышает 3%.
4. Определяем частоты вращения всех валов кинематической цепи:
n1 = nдв.ф = 1470 об/мин; n2 = n1/up = 1470/3,675 = 400 об/мин;
n3 = n2/u3 = 400/4 = 100 об/мин; n4 = n3/uоп = 100/5 = 20 об/мин. 
Расчёт считается удовлетворительным, если разница между заданной и расчётной частотами вращения вала рабочего органа (n4) не превышает 3%.
5. Определяем вращающие моменты на валах кинематической цепи:  Нм.
Нм.
 Нм;
Нм;  Нм;
Нм;
 Нм
Нм  Нм
Нм 
Таблица 14. Электродвигатели асинхронные серии 4А ГОСТ 19523-81 [10].
| РДВ,кВт | Синхронная частота вращения nс, об мин | Диаметр вала d,мм | |||||||
| 3000 | 1500 | 1000 | 750 | ||||||
| Марка | S | Марка | s | Марка | S | Марка | s | ||
| 1,5 | 80А2 | 0,042 | 80B4 | 0,058 | 90L6 | 0,064 | 100L8 | 0,07 | 22; 24;28 |
| 2,2 | 80В2 | 0,043 | 90L4 | 0,051 | 100L6 | 0,051 | 112MA8 | 0,06 | 22; 24; 28; 32 |
| 3 | 90L2 | 0,043 | 100S4 | 0,044 | 112MA6 | 0,047 | 112M8 | 0,058 | 24; 28; 32; |
| 4 | 100S2 | 0,033 | 100L4 | 0,047 | 112MB6 | 0,051 | 132S8 | 0,041 | 28; |
| 5,5 | 100L2 | 0,034 | 112M4 | 0,037 | 132S6 | 0,033 | 132M8 | 0,041 | 28; 32; 38; 42 |
| 7,5 | 112M2 | 0,025 | 132S4 | 0,03 | 132M6 | 0,032 | 160S8 | 0,025 | 32; 38; 42 |
| 11 | 132M2 | 0,023 | 132M4 | 0,028 | 160S6 | 0,027 | 160M8 | 0,025 | 38;42 |
| 15 | 160S2 | 0,021 | 160S4 | 0,023 | 160M6 | 0,026 | 180M8 | 0,025 | 42; 48 |
| 18,5 | 160M2 | 0,021 | 160M4 | 0,022 | 180M6 | 0,027 | 200M8 | 0,023 | 42; 48 |
| 22 | 180S2 | 0,02 | 180S4 | 0,02 | 200M6 | 0,028 | 200L8 | 0,027 | 48; 55 |
| 30 | 180M2 | 0,019 | 180M4 | 0,019 | 200L6 | 0,021 | 225M8 | 0,018 | 48; 55 |
| 37 | 200M2 | 0,019 | 200M4 | 0,017 | 225M6 | 0,018 | 250S8 | 0,015 | 55; 65 |
| 45 | 200L2 | 0,018 | 200L4 | 0,016 | 250S6 | 0,014 | 250M8 | 0,014 | 55; 65 |
Задача для самостоятельного решения. Рассчитать кинематическую цепь, указанную на рисунке 24 по данным, указанным в таблице 15.
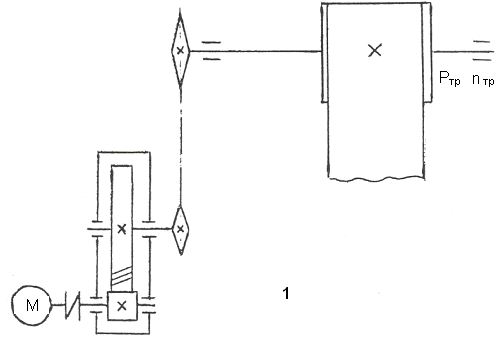
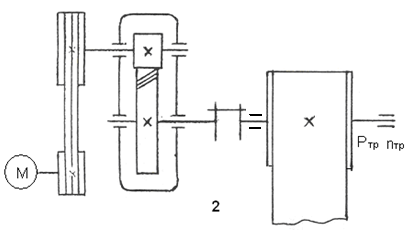
Рисунок 24. Кинематические схемы
Таблица 15. Варианты задания.
| Вариант | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| РТР, кВт | 4,6 | 3,3 | 6,3 | 4,7 | 6,4 | 2,5 | 1,8 | 4,5 | 3,5 | 1,9 | 3,6 | 4,9 | 2,6 | 6,7 | 5,3 |
| nTP, об/мин | 100 | 120 | 150 | 110 | 90 | 115 | 125 | 95 | 80 | 85 | 90 | 120 | 75 | 110 | 95 |
| Схема | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| Вариант | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | 25 | 26 | 27 | 28 | 29 | 30 |
| РТР, кВт | 4,6 | 3,4 | 6,5 | 4,8 | 6,3 | 2,8 | 2,2 | 4,8 | 3,6 | 2,4 | 3,8 | 5,2 | 3,4 | 6,8 | 5,3 |
| nTP, об/мин | 90 | 100 | 120 | 130 | 95 | 110 | 120 | 90 | 85 | 80 | 94 | 110 | 80 | 105 | 90 |
| Схема | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
Дата: 2019-11-01, просмотров: 497.