Представляет собой кинематический механизм, обеспечивающий работу
флаперонов в трёх режимах. При этих режимах выходные качалки МУФ
перемещаются синхронно или дифференциально, а также наложением одного
движения на другое.
МУФ состоит из двух смесительно-дифференциальных механизмов,
шарнирно закреплённых на кронштейне, который крепится к стенке № 3
центроплана. Здесь же через дифференциальную качалку к МУФ подключены
РМ-130Б и МПФ-10С (стенка №3 центроплана шп.34).
На секторных рычагах МУФ имеются контрольные отверстия для фиксации
выходных качалок в нейтральном положении и при полностью выпущенных
закрылках, для обеспечения монтажа и регулировок системы управления.
Кроме регулировок тягами управления, угол установки флаперонов-
закрылков может быть отрегулирован:
·для МПФ-1 ОС - настройкой кулачкового механизма;
·для РМ-130Б - настройкой соответствующего канала СДУ.
Вопрос №25 СИСТЕМА УПРАВЛЕНИЯ ФЛАПЕРОНАМИ САМОЛЁТА СУ-27):
Система управления флаперонами предназначена для поперечного управления самолётом, улучшения взлетно-посадочных характеристик самолёта, увеличения аэродинамического качества крыла.
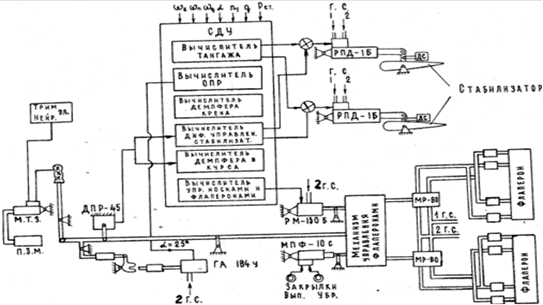
Поперечное управление осуществляется дифференциальным стабилизатором, флаперонами и рулями направления. Система поперечного управления работает от обеих гидросистем.
Передача перемещений от ручки управления к флаперонам осуществляется через жесткую (механическую) проводку, а к стабилизатору и рулям направления – через систему СДУ-10. В этом случае система поперечного управления обеспечивается СДУ-10, имеет трёхкратное резервирование. Механизм отклонения флаперонов позволяет использовать их в режиме элеронов и закрылков одновременно.
Режим закрылков обеспечивается двумя агрегатами: электромеханизмом МПФ-10С, работающим от переключателя ЗАКРЫЛКИ ВЫПУЩЕНЫ-УБРАНЫ; рулевой машиной РМ-130Б, работающей от системы СДУ-10.
В первом случае флапероны отклоняются на 20º. Во втором случае при работе в автоматическом режиме для улучшения аэродинамического качества на больших углах атаки рулевая машина РМ-130Б, работающая от системы СДУ-10, отклоняет флапероны также вниз на 10º. Работа рулевой машины РМ-130Б по сигналам СДУ-10 возможна, если кнопочный переключатель находится в положении «ЗАКРЫЛКИ УБРАНЫ». Управление флаперонами в режиме элеронов осуществляется поперечным отклонением ручки управления.
В режиме элеронов работа флаперонов обеспечивается механизмом управления, расположенным на задней стенке шпангоута №34. Перемещение ручки управления по крену передаётся по жёсткой проводке на входные рычаги распределительных механизмов МР-80 каждой консоли. В свою очередь, золотники распределительных механизмов управляют работой гидроцилиндров ГЦ-30
P . S . Управление стабилизатором в поперечном канале осуществляется системой СДУ-10 в зависимости от угла атаки, скоростного напора, статического давления и темпа перемещения ручки. До угла атаки, равного 13º, поперечное число от ручки к стабилизатору в режиме управления по крену максимальное. С увеличением угла атаки оно уменьшается и при 23º становится равным нулю, т.е. при углах атаки более 23º дифференциальное управление стабилизатором отключается. Максимальное дифференциальное отклонение стабилизатора составляет ±15º.
Максимальное отклонение рулей направления оси исходного положения при отклонении ручки управления не превышает ±12º. Рули направления отклоняются в ту же сторону, что и ручка управления самолётом, и их отклонение происходит при включённом демпфере курса. При отрицательных углах атаки передаточное число отклонения рулей направления от ручки равно нулю (т.е. рули не отклоняются), будет возрастать в диапазоне углов атаки от нуля да 2.3º и постоянно на углах атаки более 2.3º.
Усилия на ручке управления при её поперечном отклонении создаётся пружинным механизмом разгрузки, затяжка которого определяется электромеханизмом триммерного эффекта МП-100М.
Дата: 2019-07-24, просмотров: 796.