Системы управления ВС подразделяется на основную и дополнительную. Основная система предназначена для изменения траектории движения самолета, его балансировки и стабилизации на задаваемых режимах полета; Дополнительные системы управления предназначены для управления двигателями, шасси, закрылками, тормозными щитками и др.
Система управления современным самолетом представляет собой совокупность электронно-вычислительных, электрических, гидравлических и механических устройств, обеспечивающих решение следующих задач:
· Пилотирование самолета летчиком в неавтоматическом и полуавтоматическом режимах;
· Автоматического управления самолетом на режимах и этапа полета, предусмотренных ТТТ;
· Создания достаточной мощности для отклонения органов управления;
· Реализации на самолете необходимых характеристик устойчивости и управляемости самолета;
· Стабилизации установленных режимов полета;
· Повышение безопасности путем своевременного оповещения экипажа о подходе к опасным режимам полета и выдачи этих команд на отклонение органов управления;
Устройства, посредством которых в процессе управления самолетом создаются необходимые для этого силы и моменты, называются органами управления. Их отклонение вызывает нарушение равновесия аэродинамических сил и моментов, в результате чего возникает вращение самолета с угловыми скоростями и изменение траектории движения на заданных режимах полета. Таким образом, отклонение органов управления обеспечивает:
Ø Поперечную относительно оси ОХ управляемость (элероны, флапероны, элевоны, интерцепторы, дифференциально отклоняемые половины ЦПГО)
Ø Продольную относительно оси OZ управляемость (РВ, элевоны, ЦПГО, плоские управляемые сопла реактивных двигателей)
Ø Путевую относительно оси OY управляемость (РН, ЦПВО)
Устойчивость – способность самолета противостоять внешним силам, стремящимся отклонить его от заданного режима полета.
Устойчивый самолет самостоятельно, без участия летчика, сохраняет заданных режим полета и за конечный промежуток времени возвращается и исходному режиму после непроизвольного отклонения от него под действием кратковременных малых возмущений.
Вопрос №21 Система продольного управления су-27
Продольное управление осуществляется синхронным отклонением правой и
левой половин стабилизатора в зависимости от отклонения ручки управления.
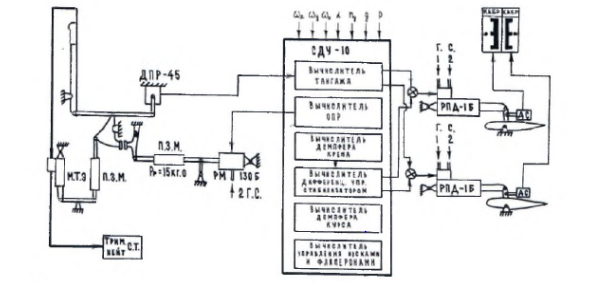
Система продольного управления электронная. Механическое отклонение
ручки управления по тангажу преобразуется с помощью электрического
положения ручки ДПР-45 в электрические сигналы, поступающие в систему
дистанционного управления СДУ-10, где они корректируются по скоростному
напору, статическому давлению и ограничиваются по максимальной скорости
поворота стабилизатора.
Отклонение обеих половин стабилизатора обеспечивается двумя электрогидравлическими рулевыми приводами РПД1Б, состоящими из распределительных устройств РПД1Б-100 и гидроцилиндров РПД1Б-500. Электрическая часть системы продольного управления четырехканальная. Питание рулевых приводов осуществляется от обеих гидросистем. При отказе одной из гидросистем усилия, развиваемые гидроцилиндром, уменьшаются в два
раза. Управление работой распределительных устройств РПД1Б-100 производится
системой СДУ-10. Четыре канала этой системы электрически связаны с четырьмя электро-
гидравлическими блоками, входящими в состав распределительного устройства, в
которых электрические сигналы от СДУ-10 преобразуются в механические
перемещения, воспринимаемые золотниковыми механизмами распределительного
устройства. Положение правой и левой половин стабилизатора контролируется по
индикаторам ИС-ПС-Б и ИС-ЛС-Б, расположенным в кабине. Система СДУ-10
ограничивает предельно допустимые углы атаки α и перегрузки Ny посредством
ограничения продольного перемещения ручки управления с помощью рулевой
машины РМ-130Б. Вычислитель СДУ-10 может работать в одном из трех режимов: «Взлет-
посадка»; «Полет»; «Жесткая связь». С помощью электромеханизма триммерного эффекта М1-100М происходит
снятие усилий с ручки управления самолетом по тангажу и крену.
Диапазон отклонения ручки:
- на себя ………. - 26º;
- от себя ………. + 19,5º.
Диапазон отклонения половин стабилизатора:
- на кабрирование ……… - 20º;
- на пикирование ………. + 15º;
- дифференциальный ….. ± 15º.
Усилия на ручке управления самолетом при ее продольном отклонении
создаются пружинным механизмом загрузки.
Дата: 2019-07-24, просмотров: 512.