Оптимизация режимов
ЭНЕРГОСИСТЕМ
Учебное пособие
Челябинск
Издательский центр ЮУрГУ
2012
УДК 621.311(07)
Б907
Одобрено
учебно-методической комиссией
энергетического факультета
Рецензенты:
И.М.Кирпичникова, А.В.Бондаренко
Булатов Б. Г.
Оптимизация режимов энергосистем: учебное пособие/ Б.Г.Булатов. – Челябинск: Издательский центр ЮУрГУ, 2012. – 86 с.
Учебное пособие предназначено для самостоятельной работы студентов всех форм обучения по направлению 140200 – Электроэнергетика специальностей: 140204 – «Электрические станции»; 140205 – «Электроэнергетические системы и сети»; 140203 – «Релейная защита и автоматизация электроэнергетических систем», бакалавров по направлению «Электроэнергетика» и магистров, осваивающих программу «Интеллектуальные энергетические системы и сети».
В конспекте рассматриваются общие вопросы диспетчерского управления, постановка задачи оптимизации, основы решения нелинейных моделей, практические приемы оптимизации режимов энергосистем и особенности решения задачи в рыночных условиях.
УДК 621.311(07)
Издательский центр ЮУрГУ, 2012
Введение
Единая энергетическая система (ЕЭС) России является базой для электроснабжения большей части территории страны. Она представляет собой объединение электрических станций и подстанций, связанных электрическими сетями разных номинальных напряжений, и является технологически единым объектом, надежный и экономичный режим которого обеспечивается с помощью централизованного диспетчерского управления.
Круглосуточное диспетчерское управление осуществляется на всех объектах энергосистемы и делится на следующие уровни иерархии:
• центральное диспетчерское управление (ЦДУ) ЕЭС;
• объединённое диспетчерское управление (ОДУ) объединением энергосистем;
• диспетчерское управление региональными энергетическими системами (РДУ).
Региональное управление включает оперативное управление на уровне предприятий электрических сетей (ПЭС); управление электрическими станциями; управление районами электрических сетей (РЭС) и управление отдельными подстанциями.
Эксплуатация энергосистем связана с большими затратами и, в первую очередь, с затратами на топливо.
Завершившаяся реструктуризация Единой Энергосистемы России и разделение ее на компании создают условия для развития конкуренции в сферах генерации и сбыта.
Сложности управления энергетикой сегодня связаны с тем, что еще не отработаны методы управления в рыночных условиях, изношено основное оборудование и существенно сокращены инвестиции в модернизацию и ввод новых генерирующих мощностей и электрических сетей. Это требует дальнейшего развития и совершенствования современных способов управления, использующих математические методы и ЭВМ, объединяемые в составе автоматизированных систем управления (АСУ).
 На рисунке 1 показана схема управления. Здесь
На рисунке 1 показана схема управления. Здесь  X – вектор внешних воздействий на систему; Y – вектор параметров режима; Z–критерий управления, формализующий основные цели функционирования системы;
X – вектор внешних воздействий на систему; Y – вектор параметров режима; Z–критерий управления, формализующий основные цели функционирования системы;
U – вектор управления.
Функциональные зависимости Y ( X , U ),Z ( X , Y , U ) определяют математическую модель процесса в энергосистеме.
Оперативное управление режимами работы энергосистем осуществляется с помощью автоматических устройств РЗиА и автоматизированной системы диспетчерского управления (АСДУ).
Одна из главных функций АСДУ – обеспечение управленческого персонала достоверной информацией о текущем состоянии системы и параметрах её режима. На рисунке 2 показаны основные направления потоков телеинформации в системе.
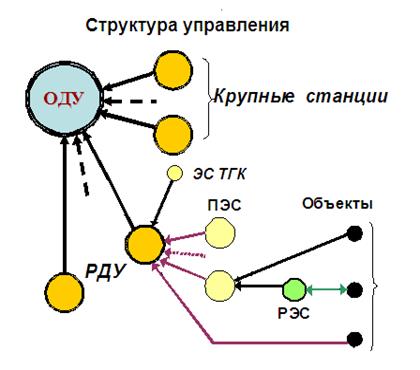
Рисунок 2
Здесь показаны ЭС, входящие в состав ОГК и ТГК , ПЭС и РЭС в составе распределительных кампаний АО-энерго, ПС магистральных сетей.
В период плановой экономики критерием управления режимами был минимум издержек на производство и передачу электроэнергии при выполнении требований надежности и качества электроснабжения. Управление строилось на базе хорошо разработанной теории оптимизации режимов.
Сегодня демонополизация энергетики РФ, начатая в 1992 г., еще не доведена до конца и пока нет отработанной теории оптимального управления энергетикой в рыночных условиях. Конкурентный рынок существенно усложняет функции диспетчерского управления из-за необходимости учета часто противоречивых коммерческих интересов и технического состояния объектов энергосистемы. Сегодня признанным критерием управления является максимум благополучия участников рынка при выполнении технологических ограничений и требований по поддержанию качества электроснабжения.
В отдельных случаях, когда субъект рынка монопольно владеет несколькими генерирующими источниками, например мини-ТЭЦ, подстанциями и электрической сетью, разработанная теория оптимизации может использоваться без каких-либо поправок на рыночные условия.
Автоматизация управления режимами энергосистем требует больших затрат, особенно на систему сбора и передачи информации, на разработку программного обеспечения и технические средства управления.
Окупаются эти затраты за счет более качественного выполнения основных требований к системе электроснабжения по обеспечению надежности в реализации договорных обязательств субъектов рынка, экономичности и качества электроэнергии. В связи с этим, предлагаемый курс содержит две относительно независимые части, которые могут изучаться как последовательно, так и параллельно:
Параметры режима ЭС
Математическая модель режима – это система нелинейных алгебраических уравнений, как правило, узловых.
 (1.1)
(1.1)
где  - матрица узловых проводимостей, имеет порядок n;
- матрица узловых проводимостей, имеет порядок n;
 - вектор напряжений в узлах;
- вектор напряжений в узлах;
 - вектор узловых мощностей;
- вектор узловых мощностей;
n – количество независимых узлов.
Для решения системы нелинейных уравнений должны задаваться независимые параметры, к числу которых относятся узловые мощности и напряжение в балансирующем узле. Имея эти параметры можно однозначно определить режим, если он существует, путем решения системы (1).
Все остальные параметры режима, полученные на основе расчета: напряжения в узлах – US , потоки по линиям – Pl , Ql , токи в ветвях – Il , потери – D P и др., называют зависимыми параметрами режима.
Часть независимых параметров (узловые мощности) в нормальных условиях не подчиняются диспетчеру (нагрузки в узлах). Остальные (мощности источников) должны оптимизироваться. К числу независимых параметров относятся и коэффициенты трансформации автотрансформаторов связи сетей разных напряжений (КТ), которые могут регулироваться с помощью РПН. Своеобразным независимым параметром является и состав включенного в работу оборудования, который характеризуется графом G .
Независимые параметры режима, оптимизация которых должна проводиться при диспетчерском управлении, можно рассматривать как вектор  , где индекс i определяет источники.
, где индекс i определяет источники.
По аналогии вектор зависимых параметров объединяет все остальные параметры режима, однозначно определяемые при фиксированных допустимых значениях всех независимых параметров:

Для определения Y при заданных X используются различные методы и программы расчета стационарных режимов.
Градиентный метод
В этом методе возможное направление выбирают противоположным направлению градиента:
 .
.
Таким образом, основное уравнение градиентного метода:
 . (1.12)
. (1.12)
 Составляющие градиента
Составляющие градиента  можно найти через конечные приращения (см. рисунок 1.6):
можно найти через конечные приращения (см. рисунок 1.6):
 .
.
Так как  , то этот метод имеет погрешность в определении градиента, которая зависит от величины приращения аргумента.
, то этот метод имеет погрешность в определении градиента, которая зависит от величины приращения аргумента.
Для снижения погрешности используют метод центриро-ванных приращений  , по которому секущая становится почти параллельной касательной, определяющей величину производной.
, по которому секущая становится почти параллельной касательной, определяющей величину производной.
Градиентный метод часто сочетается с выбором оптимального шага. Для определения величины его используется пробный шаг t 0, в конце которого определяются координаты Х1 и составляющие градиента. По значениям градиента в точках Х и Х1 определяется шаг близкий к оптимальному. Алгоритм метода приведен на рисунке 1.7:
1. Исходное приближение Х = Х (0) ;
2. Определение градиента Ñ F |X;
3. Сравнение | Ñ F| < eps;
4. t0 и определение  ;
;
5. Определение градиента в конце пробного шага Ñ F | X 1
6. Определение t 0ПТ и выполнение рабочего шага

 ;
;
7. Выход.
Метод широко используется в программах оптимизации режимов.
Метод случайного поиска
В данном методе возможные направления определяются с помощью генератора псевдослучайных чисел с равномерным распределением в диапазоне -1,…,1.
 Для этого в исходной точке Х(0) рассматривается n-мерный куб с гранью 2 × d x (см. рисунок 1.8) и считается значение функции F 0. Случайным образом выбирается точка в кубе
Для этого в исходной точке Х(0) рассматривается n-мерный куб с гранью 2 × d x (см. рисунок 1.8) и считается значение функции F 0. Случайным образом выбирается точка в кубе  , где gi – псевдослучайное число
, где gi – псевдослучайное число  . В точке Х(1) считается значение функции F 1.
. В точке Х(1) считается значение функции F 1.
Если  , то исходная точка Х(0) переносится в точку Х(1) и процедура повторяется. Если
, то исходная точка Х(0) переносится в точку Х(1) и процедура повторяется. Если  , то выбранная точка Х(1) считается неудачной, и вместо нее отыскивается новая точка. Вдали от минимума вероятность попадания в область возможных направлений близка к 50%. По мере приближения к решению величина d x уменьшается.
, то выбранная точка Х(1) считается неудачной, и вместо нее отыскивается новая точка. Вдали от минимума вероятность попадания в область возможных направлений близка к 50%. По мере приближения к решению величина d x уменьшается.
Достоинства метода: простота алгоритма, не требующего вычисления производных. Недостаток - большое число итераций.
Метод прямой оптимизации
Данный метод используется, когда G ( X ) представлена простыми функциями, например линейными. В этом случае m неизвестных из n можно аналитически выразить через остальные k = n – m , которые называют свободными, и подставить эти выражения в F ( X ) . Тогда получим новую функцию F к( X к) от меньшего числа переменных, условие минимума которой позволит составить определить k уравнений. .
Решение этих уравнений позволяет найти все k составляющих вектора X к. Остальные переменные находятся подстановкой в ранее найденные выражения.
Рассмотрим пример, в котором свободная переменная обозначена хк:
Метод прямой оптимизации прост, но может быть использован для решения только аналитически заданных функций сравнительно простого вида.
Метод случайного поиска
В этом методе в текущей точке Р1,Р2, начиная с исходной, рассматривается квадрат с центром в этой точке, и определяется расход топлива в ней B ( P1,P2). Внутри квадрата выбирается новая точка, определяемая следующим образом
 ;
;  ,
,
где d – сторона квадрата,
r - случайное число с равномерным распределением в диапазоне 0….1.
В новой точке также считается расход топлив и сравнивается с исходным.
Если в новой точке расход оказался меньше расхода в текущей точке, то текущая точка переносится в новую и расчет повторяется.
Результаты расчета приведены в таблице 2.
Таблица 2
| № | Р1 | Р2 | В |
| 0 | 200,0 | 250,0 | 1295,7 |
| 1 | 191,0 | 268,0 | 1284,3 |
| 2 | 198,0 | 305,5 | 1205,6 |
| 3 | 173,5 | 343,2 | 1189,5 |
| 4 | 201,2 | 392,5 | 1090,2 |
| … | |||
| 29 | 289,4 | 454,5 | 1021,4 |
Начальная часть траектории спуска показана на рисунке 1.17
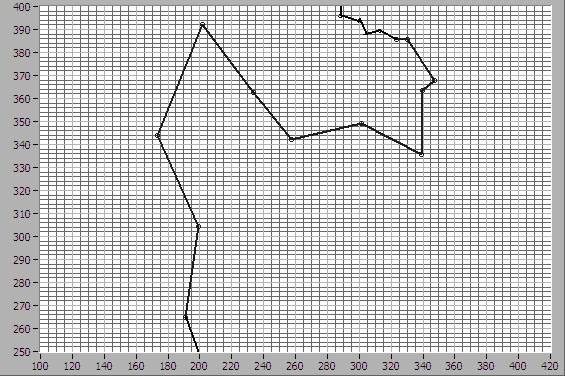
Рисунок 1.17.
Метод прост в реализации алгоритма, но сходится при большом числе итераций.
Характеристики блоков
Рассмотрим упрощенную схему основных потоков энергии в блоке (см. рисунок 1.22)
Полагаем, что известны следующие расходные характеристики объектов блока B ( QK ), Q т ( P ), Q CH ( P ), PCH ( P ). При этом часовые расходы на собственные нужды отнесены на выработку электроэнергии.
При построении ХОП блока различают удельный прирост расхода топлива брутто  и нетто
и нетто  .
.
Прирост брутто относят к полной выработке
 , (1.26)
, (1.26)
где  – относительный прирост расхода тепла на собственные нужды.
– относительный прирост расхода тепла на собственные нужды.
Прирост нетто относят к полезно отпущенной выработке
 . (1.27)
. (1.27)
При этом учтено, что  ,
,
 где
где  – относительный прирост расхода электроэнергии на собственные нужды.
– относительный прирост расхода электроэнергии на собственные нужды.
Для приблизительного расчета можно не учитывать собственные нужды. Тогда:  .
.
Для примера на рисунке 1.23 показана ХОП блока 200 МВт.
Корректировка ХОП в процессе эксплуатации требует учета всевозможных факторов, влияющих на КПД основного оборудования блока, изменения внешних условий, таких как температура наружного воздуха, температура циркуляционной воды, изменение характеристик топлива и т.п.
Маневренные свойства блока
КЭС участвуют в регулировании частоты и перетоков мощности в системе, что требует иногда быстрого их изменения. При этом различают нагрузочный диапазон блока  и регулировочный диапазон, в котором нагрузка может меняться автоматически без изменения состава вспомогательного оборудования (числа горелок, питательных насосов и т.д.).
и регулировочный диапазон, в котором нагрузка может меняться автоматически без изменения состава вспомогательного оборудования (числа горелок, питательных насосов и т.д.).
Сброс нагрузки производится быстро, а подъем – медленно по несколько процентов в минуту, особенно при включении блока после простоя. Время пуска из холодного состояния определяется плавным подъемом температуры в элементах конструкции турбины и котла, например, в барабане котла на 2,5…3,0 °С/мин, и может достигать нескольких часов, а для мощных блоков и более 10 часов. Например, контроль состояния турбины при пуске осуществляется по приборам, фиксирующим относительное удлинение и осевой сдвиг ротора; разность температур между верхом и низом цилиндров, по ширине фланцев, между фланцами и шпильками; искривление вала и вибрацию; тепловое расширение паропроводов и корпуса турбины и т. п.
При плановых простоях в часы снижения потребления продолжительность пуска зависит и определяется временем простоя блока. Пуск сопровождается дополнительными пусковыми расходами топлива, которые также зависят от длительности простоя, а также и от номинальной мощности блока. При пуске из холодного состояния мощного пылеугольного блока они могут достигать нескольких сотен тонн.
Графический метод
Графический метод используется, когда ХОП всех блоков  заданы в виде графиков (см. рисунок 1.24). Все ХОП строятся в одном масштабе по оси приростов. Затем строится характеристика станции путем суммирования мощностей блоков при фиксированных значениях прироста по условию
заданы в виде графиков (см. рисунок 1.24). Все ХОП строятся в одном масштабе по оси приростов. Затем строится характеристика станции путем суммирования мощностей блоков при фиксированных значениях прироста по условию  .
.
После этого на оси мощности ХОП электростанции откладывается значение ее нагрузки Р о и определяются соответствующие мощности блоков при выполнении баланса  .
.
Распределение с помощью ЭВМ
Рассмотрим алгоритм, где ХОП  задается таблицей. Пример такой характеристики для блока 200 МВт представлен ниже.
задается таблицей. Пример такой характеристики для блока 200 МВт представлен ниже.
| P, МВт | 90 | 120 | 170 | 170 | 200 |
| e, т у.т./МВт*ч | 0,2 | 0,28 | 0,4 | 0,45 | 0,54 |
Алгоритм строится на основе итеративного подбора такого общего для всех приростов значения m, при котором соблюдается баланс  с точностью eps. Блок-схема алгоритма приведена на рисунке 1.25.
с точностью eps. Блок-схема алгоритма приведена на рисунке 1.25.
 1 – исходное приближение m ;
1 – исходное приближение m ;
2 – зануление некоторой переменной S;
3 – цикл по блокам 
4 – определение методом линейной интерполяции по характеристике i-го блока значения мощности Pi, соответствующей m,.
5 –  ;
;
6 – определение небаланса
 ;
;
7 –  ;
;
8 –  .
.
Сходимость алгоритма во многом зависит от величины коэффициента k.
Для более надежной сходимости при подборе m могут использоваться и другие методы, например, метод половинного деления.
Размыкание сети
В многократно замкнутых сетях с несколькими центрами питания несогласованное регулирование напряжения в центрах питания может привести к появлению больших уравнительных токов, что увеличивает потери и может привести к перегрузке головных участков.
Контура размыкают вблизи точек потокораздела, найденных расчетом режима по R-схеме. В точках размыкания ставят устройства АВР, что обеспечивает требуемую надежность.
Такие мероприятия широко используются в распределительных сетях 6-10 кВ городов и промышленных предприятий, а также в местных сетях 35- 110 кВ.
Повышение напряжения
Повышение уровня напряжения в сети в пределах допустимого по условиям изоляции и качества электроэнергии позволяет снизить нагрузочные токи и, как следствие, нагрузочные потери. При этом повышение напряжения на 5% уменьшает потери примерно на 9 %. Однако потери холостого хода при этом возрастают, что в сетях напряжения 500 кВ при плохой погоде бывает целесообразно снижать напряжение для уменьшения суммарных потерь.
Иногда в рамках реконструкции сетей осуществляют переход на более высокое номинальное напряжение, например, с 6 кВ на 10 кВ. Это увеличивает пропускную способность и снижает потери.
Оптимизация надежности
Надежность определяется техническим состоянием оборудования и случайными аварийными событиями и изменением нагрузки потребителей.
Уровень надежности является экономической категорией, так как связан с затратами на повышение надежности и сокращением при этом затрат у потребителя при потере питания, называемых ущербом от недоотпуска электроэнергии. Оптимальный уровень надежности должен
определяться по минимуму общих затрат (см. рисунок 1.49).

Минимум затрат и определяет оптимальный уровень надежности. При этом приращение затрат на повышение надежности равно той экономии, которая получена за счет снижения ущерба.
При оценке надежности используется статистический материал, позволяющий определить вероятности нерабочего q и рабочего p состояния генерирующих блоков, для которых характерно условие q + p = 1. Вероятность нерабочего состояния определяется статистическими показателями потоков отказов и плановых ремонтов, которые зависят от типа оборудования.
Рассмотри простой пример по оценке целесообразности повышения надежности питания нагрузки по одноцепной ЛЭП путем сооружения второй цепи. Оценим ущерб для существующей схемы при n = 1, который равен:  , (1.68)
, (1.68)
где у0 – удельный ущерб руб/кВт×ч,
PCP – средняя нагрузка,
T – расчетный срок.
При питании по двум цепям при q 2 = q1 ущерб равен  .
.
Очевидно, сооружение дополнительной цепи выгодно, если разность ущербов больше приведенных затрат З на сооружение второй цепи, т. е.
 . (1.69)
. (1.69)
Выбор оптимального резерва
Аварийный резерв определяется как разность между располагаемой мощностью и спросом
 , (1.70)
, (1.70)
где  – учитывает фактическую рабочую мощность, а
– учитывает фактическую рабочую мощность, а  – мощность потребителей.
– мощность потребителей.
Оба показателя меняются случайно, причем – дискретно, пропорционально мощности блоков, а – непрерывно. При выборе резерва спрос изменяется дискретно на величину ступени  , определяемой мощностью минимального блока.
, определяемой мощностью минимального блока.
Рассмотрим два дискретных ряда. Первый – ряд вероятностей аварийного выхода разной мощности:
 , (1.71)
, (1.71)
где нижний индекс определяет величину аварийного выхода числом ступеней.
Второй – ряд вероятностей снижения нагрузки относительно максимальной, приведенный к дискретному виду, представим в виде
 . (1.72)
. (1.72)
Перемножим оба ряда
 (1.73)
(1.73)
и рассмотрим одно из слагаемых произведения, например,  , которое определяет вероятность совместного аварийного выхода 2 e при снижении нагрузки на e. Если в часы максимума нагрузки нет резерва, то сумма нижних индексов определяет дефицит мощности, поэтому можно определить вероятность любого дефицита в k e при R =0
, которое определяет вероятность совместного аварийного выхода 2 e при снижении нагрузки на e. Если в часы максимума нагрузки нет резерва, то сумма нижних индексов определяет дефицит мощности, поэтому можно определить вероятность любого дефицита в k e при R =0
 (1.74)
(1.74)
Если в часы максимума нагрузки есть резерв R = r e, то
 (1.75)
(1.75)
Ущерб у потребителя за счет недоотпуска электроэнергии за время T:
 (1.76)
(1.76)
Если ввести понятие интегральной вероятности дефицита, определяемой как вероятность некоторого по величине и большего, т.е.
 ,
,
 ,
,
то выражение для ущерба (1.76) при любом резерве R = r e примет вид
 . (1.77)
. (1.77)
Определим целесообразность повышения резерва на величину e МВт до значения  , требующего дополнительных затрат
, требующего дополнительных затрат  .
.
При этом ущерб снижается на величину, равную
 .
.
Так как  ,
,  , …, то они компенсируют друг друга и
, …, то они компенсируют друг друга и  .
.
Увеличение резерва будет выгодно, когда  , т.е.
, т.е.
 , или
, или  .
.
 1.24.2. Алгоритм выбора резерва
1.24.2. Алгоритм выбора резерва
Блок-схема алгоритма выбора оптимального резерва приведена на рисунке 1.50. Назначение блоков:
1. Ввод исходной информации;
2. R ДОП = 0;
3. У(0) = 0;
4. Определяется ряд снижения нагрузок;
5. Определение членов ряда  ….;
….;
6.  , k = 1,2…;
, k = 1,2…;
7.  ;
;
8.  ;
;
9.  ;
;
10. Печать R ДОП ;
11.  ;
;
12. 
Рисунок 1.50
Ряд снижения нагрузки
Дискретный ряд снижения нагрузки относительно максимальной определяется на основе обработки суточных графиков для характерных суток и построения годового графика по продолжительности (см. рисунок 1.51).
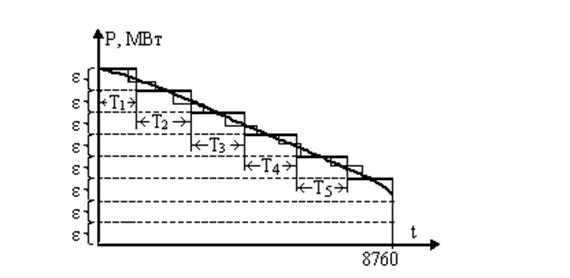
Рисунок 1.51
Полученный годовой график заменяется ступенчатым так, чтобы сохранилась площадь под графиком, пропорциональная электроэнергии.
Затем определяются интересующие вероятности
 ,
,  ;
;  …, где T = 8760.
…, где T = 8760.
Основные понятия АСУ
АСУ – это человеко-машинная система, обеспечивающая автоматизацию управления путем сбора, обработки информации и поиска оптимальных управляющих воздействий в любой сфере человеческой деятельности (рисунок 3.2).
В контуре управления человек может присутствовать на любом этапе: на этапе сбора информации, например, в случае принципиального отсутствия некоторых датчиков и необходимости лабораторного анализа, или для корректировки и реализации рекомендованных управляющих воздействий и т.п.
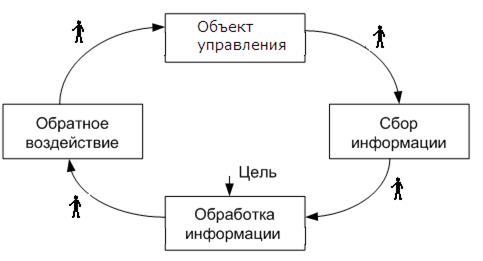
Рисунок 3.2
Схема управления с обратной связью является универсальной, действующей в природе и в искусственных технических системах, созданных человеком. Надо различать лишь АСУ и системы автоматического управления (САУ), где в контуре управления отсутствует человек.
Среди АСУ различают:
· АСУ ТП – автоматизированные системы управления технологическим процессом, в которых основная информация представлена электрическими сигналами с датчиков. Обработка осуществляется с помощью специальных управляющих вычислительных машин (УВМ) или микропроцессоров (МП). Эффект от АСУ достигается за счет повышения надежности технологического процесса и экономии ресурсов путем оптимизации.
· АСОУ – автоматизированные системы организованного управления, где основная информация представляется в виде документов (приказы, инструкции и т.п.), хотя и не исключается информация в виде электрических сигналов. Эффект достигается за счет оптимизации взаимодействия отдельных подразделений предприятия.
Часто эти две системы интегрируются в АСУ предприятия (АСУП).
АСУ состоит из целого ряда подсистем, которые подразделяются по элементам и по функциям.
Элементное разделение на подсистемы:
· техническое обеспечение (ТО) – все технические средства;
· информационное обеспечение (ИО) – вся информация;
· программное обеспечение (ПО);
· организационная – вся документация;
· кадровая – штаты, должностные инструкции, система повышения квалификации, система подготовки, система контроля исполнительности и т.п.
По функциям различают:
· управление текущим режимом или в режиме реального времени (real Time);
· планирование режима текущее и перспективное;
· управление хозяйственной деятельностью – обеспечение ресурсами, запасными деталями и т.п.;
· бухгалтерские задачи – заработная плата, учет затрат, прибыли, налоги и т.п.;
· кадры – штатное расписание, досье на работающих;
· сбыт и материально-техническое снабжение – новое оборудование, детали для ремонта, топливо и т.п.
Управление в энергетике строится по иерархическому принципу, т.е. разбивается на уровни. Например, на блочной ТЭС выделяются три уровня управления:
1) управления с местных щитов оборудования отдельными механизмами;
2) управление блоками с блочного щита управления;
3) управление общестанционными объектами с главного ЩУ.
Разделение на уровни управления повышает живучесть системы.
При управлении энергетикой в целом можно выделить следующие уровни:
0) управление технологическим процессом (АСУТП);
1) управление предприятием (АСУП), т.е. электростанцией, предприятием электрических сетей, энергосистемой;
2) управление объединением предприятий (АСУОП);
3) управление отраслью (АСУО), например, ЕЭС России.
АСУ ТП ТЭС
По мере увеличения мощности блоков усложняются процессы управления режимами, следовательно, оперативному персоналу невозможно контролировать все параметры, тем более при внештатных ситуациях. Ставиться задача помочь оперативному персоналу, например, информировать о приближении к предельным параметрам. Сократилось число параметров, контролируемых человеком.
Для блоков 500 МВт в 70 гг. была разработана специальная ЭВМ для контроля параметров режима: ОЗУ – 1 Кбайт, порядка 1000 параметров с простым алгоритмом. Затем были разработаны машины единой серии универсального типа СМ и ЕС.
В качестве примера рассмотрим объем информации для блока ТЭЦ. Основное оборудование блока: Котел Е-670, 670 т.пара/час при давлении 14 МПа и температуре 5450С; Турбина Т-180/220, активная мощность 180 МВт, тепловая энергия 260 гкал/ч, давление 13 МПа, температура 5400С; блочный трансформатор ТДЦ-250000/220.
Число контролируемых параметров 1450. В том числе:
– давления и расходы – 450;
– измерение электрических параметров – 100;
– термопары, для измерения температуры – 350;
– термосопротивления, для измерения температуры металла и конструкций, особенно много в системе охлаждения – 450;
– механических величин – 60, в том числе оборотов – 5, относительных расширений – 25; эксцентриситета – 5 и вибрации опор – 25;
– химический контроль воды – 25;
– химический анализ газов – 15.
Исполнительные механизмы. Общее число дискретных механизмов типа включить-отключить около 500, регулирующих каналов (отбор, отпуск пара и т.п.) примерно 180, регулируемых электрических приводов – 525 (например, дымососа).
Число рассчитываемых технико-экономических показателей 250, как минимум в часовом разряде.
Сигнальных табло около 50 на разных уровнях.
Структура оперативного управления строится как многоуровневая (рис. 3.26):
1) на высшем: ГЩУ и дежурный инженер станции;
2) ниже блочный или групповой щит управления, здесь начальники смен и оперативный персонал;
3) местные щиты управления, где размещаются операторы (котла, турбины, блочного трансформатора).
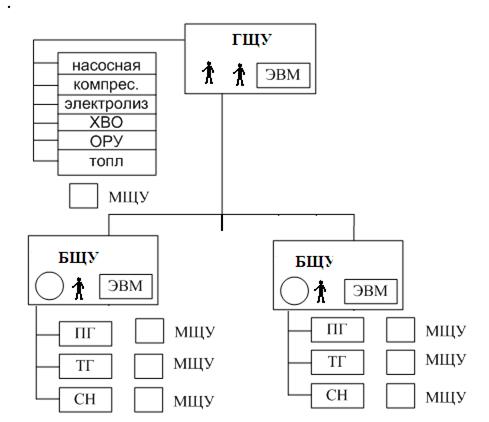
Рис. 3.26
На БЩУ располагаются периферийные вычислительные комплексы ПВК, связанные и объектами управления.
На ГЩУ общестанционный вычислительный комплекс (ОВК), куда передается основная информация с БЩУ и осуществляется связь с ДП энергосистемы. Кроме того ОВК обслуживает общестанционные объекты, куда входят: главные насосы; компрессорная; электролизная; цех химводоочистки; ОРУ; топливоподача.
На всех уровнях осуществляется взаимодействие оперативного персонала и ЭВМ. Здесь возможны следующие схемы:
1) Схема советчика диспетчера (рис. 3.27). Принятые обозначения на схеме:
ТОУ – технический объект управления; САР – система автоматического регулирования; Хв – внешнее воздействие; Х – входные регулируемые параметры; U – управляющее воздействие; Y – вектор параметра режима; ri – коэффициенты для регуляторов.
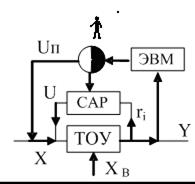
Рис. 3.27
Информация обрабатывается и выдается визуально оперативному персоналу, который принимается окончательное решение и осуществляет управление Uп. Еще персонал может воздействовать на настройку некоторых параметров регуляторов. Эта схема сегодня в основном используется.
В схеме оператор должен четко представлять технологический процесс, критерии и методы оптимизации. Программное обеспечение ЭВМ реализует несложные алгоритмы и работает достаточно надежно.
2) Схема супервизор –надсмотрщик (рис.3.28).
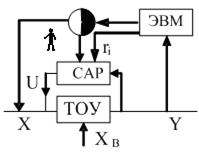
Рис. 3.28
Здесь на ЭВМ возлагается больше функций, она способна более полно воздействовать на САР и разгрузить персонал от некоторых операций управления и контроля. Математические модели и алгоритмы усложняются по сравнению с первой схемой. Функции оператора упрощаются.
3) Полностью цифровое управление (рис. 3.29):
Рис. 3.29
Схема может работать при сложных многофункциональных математических моделях, алгоритмах и программах. Роль оператора сведена до минимума. Сегодня к такой схеме можно только приближаться.
Во всех случаях управление должно обеспечивать определенные критерии управления, т.е. быть оптимальным.
При управлении реализуется функционально-групповой принцип, где все объекты, участвующие в технологии, объединяются в группы по функциям. Для парогенераторов эти группы объединяются в связи
1) с подготовкой и подачей топлива и сжиганием его;
2) с управлением пароводяным трактом, куда входят питательный насос, нагревательные поверхности котла (нагревательные трубки), барабан (если котел барабанного типа), пароперегреватель, главный паропровод;
3) с подачей воздуха, включая дутьевой вентилятор, воздухоподогреватель, горелки и т.п.
4) тракт уходящих газов: дымосос, электрические фильтры, труба и т.п.
Для турбин функциональных групп еще больше.
Все эти технические средства располагаются в шкафах, которые связывают ЩУ с исполнительными механизмами.
АСУ ТП выполняет следующие функции:
1.Управляющие:
1) автоматическое регулирование и непрерывное управление параметрами технологического процесса по определенным законам – в них реализуется САР;
2) дискретное управление операций типа открыть и закрыть, включить и отключить;
3) технологические защиты, их много в тепловой части;
4) перевод на ручное управление с резервированием функций, которые должны выполняться автоматически;
5) оптимизация режимов работы оборудования;
6) воздействие на технологический процесс при внештатных ситуациях;
7) оптимизация состава оборудования;
Информационные:
1) сбор информации, проверка достоверности, фильтрация, т.е. первичная обработка;
2) архивирование;
3) контроль параметров режима и диагностика, контролируются механические параметры, работа систем охлаждения, температурный режим топки котла и т.п.;
4) определение параметров технологического процесса;
5) отображение информации;
6) контроль диспетчерского графика.
АСУ ТП подстанций
Подстанции сегодня с позиции управления разделяют на три группы:
1) малоответственные, без дежурного персонала, работающие на местные сети и практически на влияющие на питающую сеть. Контроль и управление осуществляется эпизодически персоналом оперативно-выездных бригад (ОВБ) или путем дежурства на дому. Для автоматизации могут использоваться простейшие УТМ;
2) подстанции, телеуправляемые с диспетчерских пунктов или с ОПУ соседних подстанций, где есть персонал. Анализ и принятие решений на основе телеметрии, поступающей с управляемой подстанции;
3) системообразующие подстанции, обычно 220 кВ и выше, но иногда и 110 кВ, которые обеспечивают перетоки между подстанциями в замкнутой сети и организуется питание распределительных сетей. Основное средство на таких подстанциях - АСУ ТП. Сегодня эти подстанции эксплуатируются с дежурным персоналом, но ставится задача перевода их на режим управления с диспетчерских пунктов, которые являются подразделениями СО, РДУ, ДП, предприятий электрических сетей, входящих в ФСК, МЭС.
При автоматизации управления на всех уровнях управляемыми являются: коммутационные аппараты (выключатели, разъединители, заземляющие ножи, устройства РПН); задатчики систем автоматического регулирования (устройства компенсации: синхронные компенсаторы, реакторы с подмагничиванием, которые потребляют при постоянно включенном регуляторе меняющуюся реактивную мощность из сети и другие устройства гибкого управления).
Все управление осуществляется на основе анализа информации. Минимальный объем информации, передаваемой на диспетчерские пункты с объектов, определяется «Руководящими указаниями по выбору объемов информации».
Для подстанций первого типа предусматривается организация специальных пунктов управления. Технические средства должны обеспечивать как ручное, так и автоматизированное управление, выдачу на место управления коммутационным аппаратом минимальной информации, должна предусматриваться регистрация аварийных отключений.
Для подстанций второго типа в проектах предусматривается: техника контроля текущего состояния главной схемы собственных нужд; контроль текущего режима; сигнализация диспетчера о работе РЗА и ПА; появления недопустимых отклонений. На таких подстанциях должна передаваться на диспетчерский пункт диагностическая информация о важнейшем оборудовании, в первую очередь о трансформаторе, должно обеспечиваться ТУ коммутационными аппаратами. Все эти функции возлагаются на УТМ.
Для подстанций третьего типа основой управления является АСУ ТП, базовыми функциями которой являются:
1) сбор и обработка информации о текущем состоянии оборудования;
2) контроль параметров режима;
3) контроль исправности цепей блокировок;
4) аварийно-предупредительная сигнализация;
5) отражение состояния системы и параметров режима;
6) диспетчерское управление коммутационными аппаратами;
7) регистрация и архивирование событий;
8) осциллографирование аварийных процессов;
9) регистрация действий персонала;
10) технический учет эклектической энергии
11) обмен информацией с другими уровнями управления.
Дополнительные функции могут быть по заявке заказчика.
Взаимодействие оперативного персонала и АСУ ТП осуществляется на основе выбора объекта, как правило на мнемосхеме, например при управлении коммутационным аппаратом предусматривают обязательно следующие этапы:
1) выбор объекта;
2) получение подтверждения;
3) выдача команды;
4) подтверждение выполнения.
Для выполнения функций контроля и управления формируются следующие пункты управления:
1) центральный ЦПУ ПС;
2) АРМ – автоматизированное рабочее место, например, релейщика;
3) пункт управления собственных нужд;
4) АРМ системного инженера, обслуживающего техническое и программное обеспечение АСУ ТП.
При управлении другими подстанциями с этой системной делается АРМ по управлению этими подстанциями, на котором отображается ТС, ТИ с этих подстанций. Основной объект для связи – щит управления, который включает: мнемосхему, ключи управления коммутационными аппаратами, индикаторы положения коммутационных аппаратов, цифровые приборы, сигнальное табло.
Сегодня в управлении важную роль играет учет электроэнергии как технический, так и коммерческий. Организации учета посвящено много руководящих документов и типовых инструкций. По этим документам сегодня для коммерческого учета могут использоваться трехфазные, трехэлементные счетчики. Счетчики могут быть включены по схеме Арона (в фазы А и С), такая схема включения дает погрешность и ее нельзя применять на стороне высокого напряжения. Для измерений надо использовать счетчики с цифровым интерфейсом или с численно-импульсным выходом.
Высокие требования применяются к трансформаторам тока и напряжения. На 220 кВ класс точности 0,2 или 0,2S (трансформатор тока со специальным железом, которое на насыщается при токах КЗ). По рекомендациям ФСК на подстанциях 500 кВ (330-750 кВ) требуется установка трансформаторов тока не только в цепях выключателей, но и в цепях линий.
Автоматизированная информационно-измерительная система коммерческого учета электрической энергии (АИИСКУЭ) должна интегрироваться в АСУ ТП для взаимного контроля. Данные АСКУЭ могут использоваться для формирования 30 минутных средних мощностей независимо от телеметрии.
Автоматизация на подстанциях стала развиваться после АСУ ТП электростанций и АСДУ энергосистем. На первом этапе устройства контроля выдавали информацию о режиме подстанции на диспетчерские пункты, и подчас оперативный персонал подстанций имел меньше информации, чем диспетчер энергосистемы, так как для него была недоступна информация, которая предавалась через УТМ. Первыми шагами автоматизации были «системы прослушивания» информационной шины.
Сегодня роль АСУ ТП подстанций возрастает, так как реально все управление объектами электрических сетей в конечном счете осуществляется через подстанции. АСУ ТП подстанций играют ключевую роль в управлении. Главная тенденция развития связана с комплексным подходом к решению всех задач управления, то есть интегрирования и создания единого программно-технологического комплекса для решения всех задач РЗ, ПА, автоматического регулирования и оперативного управления на базе единой технической и информационной базы. Эти общемировые тенденции реализуется следующим образом:
1) переходом к интегрированным системам управления, основанным на использовании программируемых микроконтроллеров и ПЭВМ;
2) использованием интегрированных электронных устройств на отдельных присоединениях, выполняющих функции защиты, автоматики, измерений и оперативного управления. Для таких систем интеграция заключается в широком использовании локальных сетей на подстанциях и открытых систем, которые позволяют в процессе развития подключать программные продукты и технические средства различных фирм
Общая концепция построения АСУ ТП должна учитывать также использование системы единого времени с синхронизацией путем спутниковой связи, комплекс задач и функций АСУ ТП должен быть открыт для расширения и можернизации.
Структура АСУ ТП на подстанциях строиться как трехуровневая:
1. Нижний уровень или полевой включает устройство сбора данных с объекта и выдачу управляющих воздействий. Техника нижнего уровня располагается как можно ближе к объекту. Сюда входят: МП, контроллеры, цифровые преобразователи, МП РЗиА, устройства определения места повреждений, регистраторы событий.
2. Средний уровень образуют устройства концентрации, первичной обработки и передачи информации от полевого уровня на верхний уровень. Они включают концентраторы или шлюзы – это программно-аппаратные средства, обеспечивающие связь уровней, которая осуществляется по стандартам RS 485/232, а также первичную обработку. Сюда же входит система единого времени.
3. К верхнему уровню относятся средства централизованного хранения и представления информации, которая объединяет рабочие станции и АРМы.
АРМ должны находиться у оперативного персонала (дежурный инженер или диспетчер), АРМ инженера РЗиА, службы АСУ, службы эксплуатации, начальника подстанции. Программное обеспечение включает комплексы программ отображения информации. Осциллограф, программы срабатывания РЗ, архивирования, оценки ресурсов оборудования.
Библиографический список
1. Арзамасцев Д.А. и др. АСУ и оптимизация режимов энергосистем: Учебное пособие для студентов вузов / Д.А. Арзамасцев, П.И. Бартоломей, А.М. Холян; Под ред. Д.А. Арзамасцев. – М:. Высш. шк., 1983.
2. Электрические системы: Автоматизированные системы управления режимами энергосистем / Под ред. В.А. Веникова. – М:. Высш. шк., 1973.
3. В.А. Веников и др. Оптимизация режимов электростанций и энергосистем: Учебник / В.А. Веников, В.Г. Журавлёв, Т.А. Филиппова. – М.: Энергоатомиздат, 1990.
4. Булатов Б.Г. АСУ и оптимизация режимов энергосистем: Учебное пособие к лабораторным работам. – Челябинск: Изд. ЮУрГУ, 2000.
5. Автоматизация диспетчерского управления в элекроэнергетике / под общей ред. Ю.Н. Руденко и В.А. Семёнова. – М.: Издательство МЭИ, 2000.
ОГЛАВЛЕНИЕ
Введение. 5
1. Оптимизация режимов энергосистем. 6
1.1. Параметры режима ЭС. 6
1.2. Формулировка задачи оптимизации. 7
1.3. Особенности задачи нелинейного программирования. 8
1.4. Методы безусловной оптимизации. 9
1.4.1. Метод покоординатного спуска. 10
1.4.2. Градиентный метод. 11
1.4.3. Метод случайного поиска. 12
1.4.4. Метод деформированного многогранника. 13
1.5. Оптимизация с учетом ограничений в форме равенств. 13
1.5.1. Метод прямой оптимизации. 13
1.5.2. Метод приведенного градиента. 14
1.5.3. Метод неопределенных множителей Лагранжа. 15
1.6. Оптимизация с учетом ограничений в форме неравенств. 16
1.7. Условия оптимального распределения нагрузки между параллельно работающими блоками. 18
1.8. Характеристики основного оборудования ТЭС. 20
1.9. Характеристики блоков. 23
1.10. Маневренные свойства блока. 24
1.11. Методы распределения нагрузки между блоками на КЭС. 24
1.11.1. Графический метод. 24
1.11.2. Распределение с помощью ЭВМ. 25
1.12. Влияние погрешностей в определении e на пережег топлива. 26
1.13. Условие оптимального распределения в системе с ТЭС. 27
1.14. Условия распределения с учетом федерального оптового рынка энергии и мощности (ФОРЭМ). 28
1.15. Определение удельных приростов потерь. 29
1.16. Мероприятия по снижению потерь в сети. 31
1.17. Распределение нагрузки в системе с ГЭС. 32
1.18. Определение характеристик ГЭС. 33
1.19. Распределение нагрузки в системе с ГЭС. 35
1.19.1. Применение динамического программирования для выбора графика сработки водохранилища для ГЭС. 35
1.20. Оптимизация реактивной мощности в системе. 38
1.21. Комплексная оптимизация режима. 38
1.22. Выбор состава включенного в работу оборудования. 40
1.23. Применение ЭВМ для оптимизации. 41
1.24. Оптимизация надежности. 43
1.24.1. Выбор оптимального резерва. 43
1.24.2. Алгоритм выбора резерва. 45
1.24.3. Определение дискретных рядов аварийного выхода и снижения нагрузки. 46
1.24.4. Ряд снижения нагрузки. 47
1.25. Оптимизация качества электроэнергии. 47
1.26. Интегральный критерий качества. 48
1.27. Определение оптимального напряжения для осветительной нагрузки. 50
Оптимизация режимов
ЭНЕРГОСИСТЕМ
Учебное пособие
Челябинск
Издательский центр ЮУрГУ
2012
УДК 621.311(07)
Б907
Одобрено
учебно-методической комиссией
энергетического факультета
Рецензенты:
И.М.Кирпичникова, А.В.Бондаренко
Булатов Б. Г.
Оптимизация режимов энергосистем: учебное пособие/ Б.Г.Булатов. – Челябинск: Издательский центр ЮУрГУ, 2012. – 86 с.
Учебное пособие предназначено для самостоятельной работы студентов всех форм обучения по направлению 140200 – Электроэнергетика специальностей: 140204 – «Электрические станции»; 140205 – «Электроэнергетические системы и сети»; 140203 – «Релейная защита и автоматизация электроэнергетических систем», бакалавров по направлению «Электроэнергетика» и магистров, осваивающих программу «Интеллектуальные энергетические системы и сети».
В конспекте рассматриваются общие вопросы диспетчерского управления, постановка задачи оптимизации, основы решения нелинейных моделей, практические приемы оптимизации режимов энергосистем и особенности решения задачи в рыночных условиях.
УДК 621.311(07)
Издательский центр ЮУрГУ, 2012
Введение
Единая энергетическая система (ЕЭС) России является базой для электроснабжения большей части территории страны. Она представляет собой объединение электрических станций и подстанций, связанных электрическими сетями разных номинальных напряжений, и является технологически единым объектом, надежный и экономичный режим которого обеспечивается с помощью централизованного диспетчерского управления.
Круглосуточное диспетчерское управление осуществляется на всех объектах энергосистемы и делится на следующие уровни иерархии:
• центральное диспетчерское управление (ЦДУ) ЕЭС;
• объединённое диспетчерское управление (ОДУ) объединением энергосистем;
• диспетчерское управление региональными энергетическими системами (РДУ).
Региональное управление включает оперативное управление на уровне предприятий электрических сетей (ПЭС); управление электрическими станциями; управление районами электрических сетей (РЭС) и управление отдельными подстанциями.
Эксплуатация энергосистем связана с большими затратами и, в первую очередь, с затратами на топливо.
Завершившаяся реструктуризация Единой Энергосистемы России и разделение ее на компании создают условия для развития конкуренции в сферах генерации и сбыта.
Сложности управления энергетикой сегодня связаны с тем, что еще не отработаны методы управления в рыночных условиях, изношено основное оборудование и существенно сокращены инвестиции в модернизацию и ввод новых генерирующих мощностей и электрических сетей. Это требует дальнейшего развития и совершенствования современных способов управления, использующих математические методы и ЭВМ, объединяемые в составе автоматизированных систем управления (АСУ).
На рисунке 1 показана схема управления. Здесь X – вектор внешних воздействий на систему; Y – вектор параметров режима; Z–критерий управления, формализующий основные цели функционирования системы;
U – вектор управления.
Функциональные зависимости Y ( X , U ),Z ( X , Y , U ) определяют математическую модель процесса в энергосистеме.
Оперативное управление режимами работы энергосистем осуществляется с помощью автоматических устройств РЗиА и автоматизированной системы диспетчерского управления (АСДУ).
Одна из главных функций АСДУ – обеспечение управленческого персонала достоверной информацией о текущем состоянии системы и параметрах её режима. На рисунке 2 показаны основные направления потоков телеинформации в системе.
Рисунок 2
Здесь показаны ЭС, входящие в состав ОГК и ТГК , ПЭС и РЭС в составе распределительных кампаний АО-энерго, ПС магистральных сетей.
В период плановой экономики критерием управления режимами был минимум издержек на производство и передачу электроэнергии при выполнении требований надежности и качества электроснабжения. Управление строилось на базе хорошо разработанной теории оптимизации режимов.
Сегодня демонополизация энергетики РФ, начатая в 1992 г., еще не доведена до конца и пока нет отработанной теории оптимального управления энергетикой в рыночных условиях. Конкурентный рынок существенно усложняет функции диспетчерского управления из-за необходимости учета часто противоречивых коммерческих интересов и технического состояния объектов энергосистемы. Сегодня признанным критерием управления является максимум благополучия участников рынка при выполнении технологических ограничений и требований по поддержанию качества электроснабжения.
В отдельных случаях, когда субъект рынка монопольно владеет несколькими генерирующими источниками, например мини-ТЭЦ, подстанциями и электрической сетью, разработанная теория оптимизации может использоваться без каких-либо поправок на рыночные условия.
Автоматизация управления режимами энергосистем требует больших затрат, особенно на систему сбора и передачи информации, на разработку программного обеспечения и технические средства управления.
Окупаются эти затраты за счет более качественного выполнения основных требований к системе электроснабжения по обеспечению надежности в реализации договорных обязательств субъектов рынка, экономичности и качества электроэнергии. В связи с этим, предлагаемый курс содержит две относительно независимые части, которые могут изучаться как последовательно, так и параллельно:
Оптимизация режимов энергосистем,
Дата: 2019-04-23, просмотров: 533.