В зависимости от принципа и закона функционирования ЗУ, задающего программу изменения выходной величины, различают основные виды САУ: системы стабилизации, программные, следящие и самонастраивающиеся системы, среди которых можно выделить экстремальные, оптимальные и адаптивные системы.
В системах стабилизации обеспечивается неизменное значение управляемой величины при всех видах возмущений, т.е.  . ЗУ формирует эталонный сигнал, с которым сравнивается выходная величина. ЗУ, как правило, допускает настройку эталонного сигнала, что позволяет менять по желанию значение выходной величины.
. ЗУ формирует эталонный сигнал, с которым сравнивается выходная величина. ЗУ, как правило, допускает настройку эталонного сигнала, что позволяет менять по желанию значение выходной величины.
В программных системах обеспечивается изменение управляемой величины в соответствии с программой, формируемой ЗУ. В качестве ЗУ может использоваться кулачковый механизм и.т.д. К этому виду САУ можно отнести заводные игрушки, магнитофоны и т.д. Различают системы с временной программой, обеспечивающие  и системы с пространственной программой, в которых
и системы с пространственной программой, в которых  , применяемые там, где на выходе САУ важно получить требуемую траекторию в пространстве, например, в копировальном станке, закон движения во времени здесь роли не играет.
, применяемые там, где на выходе САУ важно получить требуемую траекторию в пространстве, например, в копировальном станке, закон движения во времени здесь роли не играет.
Следящие системы отличаются от программных лишь тем, что программа  , или
, или  заранее неизвестна. В качестве ЗУ выступает устройство, следящее за изменением какого-либо внешнего параметра. Эти изменения и будут определять изменение выходного параметра САУ. Например, рука робота, повторяющая движение руки человека.
заранее неизвестна. В качестве ЗУ выступает устройство, следящее за изменением какого-либо внешнего параметра. Эти изменения и будут определять изменение выходного параметра САУ. Например, рука робота, повторяющая движение руки человека.
В самонастраивающихся системах ЗУ ищет такое значение управляемой величины, которое в каком-то смысле является оптимальным.
Так в экстремальных системах (рис. 15) требуется, чтобы выходная величина всегда принимала экстремальное значение из всех возможных, которое заранее не определено и может непредсказуемо изменяться. Для его поиска система выполняет небольшие пробные движения и анализирует реакцию выходной величины на эти пробы. После этого вырабатывается управляющее воздействие, приближающее выходную величину к экстремальному значению. Процесс повторяется непрерывно. Т.к. в данных СА происходит непрерывная оценка выходного параметра, то они выполняются только в соответствии с принципом обратной связи.
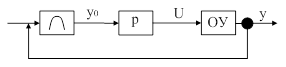
Рис. 15. Структурная схема экстремальной системы.
Оптимальные системы являются более сложным вариантом экстремальных систем. Здесь происходит, как правило, сложная обработка информации о характере изменения выходных величин и возмущений, о характере влияния управляющих воздействий на выходные величины, может быть задействована теоретическая информация и т.д. Поэтому основным отличием оптимальных систем является наличие ЭВМ. Эти системы могут работать в соответствии с любым принципом управления.
В адаптивных системах предусмотрена возможность автоматической перенастройки параметров, или изменения принципиальной схемы САУ с целью приспособления к изменению внешних условий. В соответствии с этим различают самонастраивающиеся и самоорганизующиеся адаптивные системы.
Все виды САУ обеспечивают совпадение выходной величины с требуемым значением. Отличие лишь в программе изменения требуемого значения.
Дата: 2019-02-19, просмотров: 363.