Компьютеры, управляющие процессами, имеют другие задачи, нежели компьютеры, используемые для «классической» обработки информации. Основная разница состоит в том, что управляющий компьютер должен работать со скоростью, соответствующей скорости процесса (рис. 5). Само понятие «реальное время» указывает на то, что в реакции компьютерной системы на внешние события не должно быть заметного запаздывания.

Рис. 5. Применение компьютера в управлении процессом.
Другая главная особенность компьютерного управления процессом заключается в том, что ход исполнения программы нельзя определить заранее. Внешние сигналы могут прерывать или изменять последовательность исполнения операторов программы, причем для каждого нового прогона по-разному.
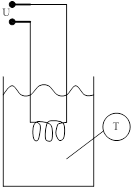
Пример простого контура управления – регулятор температуры.
Рассмотрим бак, заполненный жидкостью, температура которой должна поддерживаться постоянной (рис. 6).
|
| Рис. 6. Простая система регулирования температуры. |
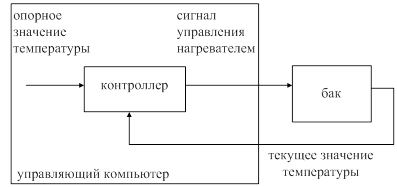
Все сигналы в этом примере аналоговые, т.е. изменение температуры отслеживается непрерывно, и подача тепла может регулироваться плавно. Температура измеряется датчиком, выходное напряжение которого пропорционально текущей температуре. Измерения периодически, например каждую секунду поступают в компьютер, и текущее значение температуры сравнивается с требуемым (опорным), которое хранится в памяти компьютера. Величина нагрева или охлаждения рассчитывается по разности между опорным и измеренным значениями (рис. 7).
|
| Рис. 7. Простой контур управления – система регулирования температуры. |
В зависимости от исполнительного механизма – устройства непосредственно влияющего на процесс, - меняется вид управляющего сигнала, подающегося на его вход. Температуру можно регулировать с помощью нагревателя, периодически включаемого на заданный интервал времени, или использовать теплообменник, соединенный с трубопроводами пара и холодной воды. В первом случае управляющим действием является момент включения нагревателя; во втором – регулирование осуществляется за счет открытия или закрытия клапанов трубопровода пара или охлаждающей жидкости.
Генерация опорного значения
Обычно при регулировании необходимо поддерживать величину управляемого параметра в соответствии с опорным значением – уставкой, - которое постоянно пересчитывается во время протекания процесса. Вычисление уставки не должно иметь заметного запаздывания – каждое ее новое значение должно быть рассчитано до момента очередного сравнения с текущим значением управляемой величины (рис. 8).

Рис. 8. Генерация опорного значения
Система, отслеживающая значение опорного сигнала с достаточной быстротой и точностью, называется сервомеханизмом или, кратко, серво. В сервосистемах опорные значения либо рассчитываются, либо задаются в виде таблиц. Каждое вновь вычисленное опорное значение сравнивается с текущим положением. Затем компьютер посылает сигналы коррекции исполнительным механизмам.
Дата: 2019-02-19, просмотров: 446.