Рассмотрим систему наведения с радиовизированием цели. Система наведения с радиовизированием имеет радиовизир цели РВЦ, антенна которого направлена на цель. С помощью радиовизира измеряются координаты цели: угол места  , азимут
, азимут  ц и дальность до цели
ц и дальность до цели  ц.
ц.
Радиовизирование ЛА осуществляется радиовизиром РВС, работающим совместно с ответчиком Отв на борту аппарата. При этом измеряются координаты ЛА: угол места  , азимут c и дальность с.
, азимут c и дальность с.
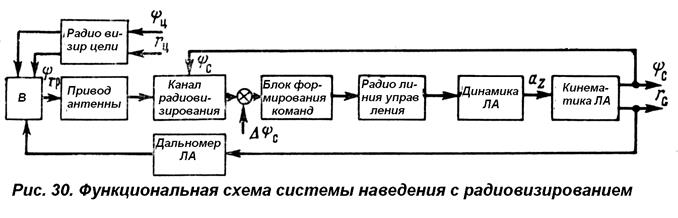
На рис. 30 дана функциональная схема наведения в горизонтальной плоскости с радиовизиром. Сигналы радиовизира цели ц и ц поступают в вычислитель В, куда подается также сигнал с, измеренный каналом дальности радиовизира ЛА. В вычислителе В вырабатывается потребный угол линии визирования цели  где
где  — угол упреждения, который в момент встречи ЛА с целью должен обратиться в нуль. Привод антенны по значению
— угол упреждения, который в момент встречи ЛА с целью должен обратиться в нуль. Привод антенны по значению  направляет ось радиовизира в точку
направляет ось радиовизира в точку  , где
, где  — погрешность привода. В канале визирования сигнал
— погрешность привода. В канале визирования сигнал  сравнивается с сигналом
сравнивается с сигналом  измеренным радиовизиром ЛА, и разность подается на блок формирования команд. Сформированная команда по линии телеуправления поступает в систему управления ЛА. Указанное на схеме звено «динамика ЛА» включает собственно динамику ЛА и бортовую систему управления.
измеренным радиовизиром ЛА, и разность подается на блок формирования команд. Сформированная команда по линии телеуправления поступает в систему управления ЛА. Указанное на схеме звено «динамика ЛА» включает собственно динамику ЛА и бортовую систему управления.
Для получения структурной схемы системы командного управления необходимо вывести кинематические уравнения.
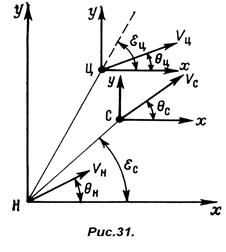
Пользуясь построением, показанном на рис. 31 (предполагается, что пункт наведения движется со скоростью VH ; рассматривается движение в вертикальной плоскости), можно написать выражения для проекции скоростей на направления ц и  и на перпендикуляры к ним:
и на перпендикуляры к ним:
 (128)
(128)
где  - угол места пункта наведения.
- угол места пункта наведения.
Предполагая, что аргументы синусов и косинусов малые величины, можем написать:
 (129)
(129)
 (130)
(130)
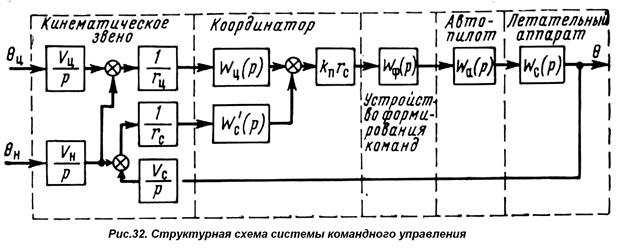
Выражения (130) являются искомыми кинематическими уравнениями. Если обозначить:  и
и  —передаточные функции измерителей углов
—передаточные функции измерителей углов  и ;
и ;
 — передаточное число, учитывающее изменение дальности rc;
— передаточное число, учитывающее изменение дальности rc;
Wcp ( p ) — передаточная функция устройства формирования и передачи команд, то структурную схему системы командного управления (канал управления в вертикальной плоскости) можно представить так, как показано на рис. 32. Видно, что при постоянных  возмущениями на систему являются углы места цели и пункта наведения
возмущениями на систему являются углы места цели и пункта наведения
В системах наведения по радиолучу ЛА удерживается в радиолокационном поле, имеющем форму тела вращения, и образуемом вращением диаграммы направленности передатчика радиолокатора. Равносигнальная зона РСЗ луча совпадает с осью локатора РЛ и направлена на цель. При отклонении центра масс ЛА от равносигнальной зоны в приемнике возникает сигнал, характеризующий величину и направление отклонения. Этот сигнал используется для формирования команд управления летательным аппаратом. В отличие от командных систем управления в системе управления по радиолучу команды управления формируются на борту ЛА. Бортовые системы управления, работающие в контуре телеуправления, можно разделить на: системы без стабилизации угловых координат, системы со стабилизацией угловых координат и системы с автономной стабилизацией движения центра масс.
Как правило, бортовые системы являются трехканальными (крен, курс, тангаж), при этом для каждого из каналов могут применяться системы с разными законами управления. В ракетах небольших размеров с круговой симметрией применяются продольный и боковой каналы, которые выполняются идентичными, а закон управления берется в виде
 (131)
(131)
где и — сигнал от системы наведения, а сигналы  и обеспечивают демпфирование и статическую устойчивость. Выбор передаточных чисел
и обеспечивают демпфирование и статическую устойчивость. Выбор передаточных чисел  обусловлен требованием заданного переходного процесса. Применение закона управления (131) обеспечивает получение систем управления с широкой полосой пропускания, что необходимо для наведения на маневрирующие цели.
обусловлен требованием заданного переходного процесса. Применение закона управления (131) обеспечивает получение систем управления с широкой полосой пропускания, что необходимо для наведения на маневрирующие цели.
Бортовые системы управления при наведении по лучу не имеют существенных отличий от бортовых систем, применяемых в контурах телеуправления. Поскольку при наведении по лучу характерна большая кривизна траекторий невозмущенного движения, то следует применять бортовые системы (автопилоты) с законами управления, обеспечивающими хорошее маневрирование. Другими словами, следует применять автопилоты без стабилизации угловых координат. Для обеспечения устойчивости контура наведения в бортовых системах обеспечивается дифференцирование сигнала линейного отклонения и применение обратной связи по ускорению. Искусственное демпфирование вводится за счет сигналов скоростных гироскопов.
Лекция 25.
План
1. Понятие о беспилотном летательном аппарате.
2. Структура и классификация БЛА.
Дата: 2019-02-02, просмотров: 866.