Значительный класс задач, выполняемых ЛА, сводится к обеспечению встречи с целью. Под целью будем понимать точку пространства (на земле или в воздухе), являющуюся конечной точкой траектории полета ЛА. В качестве ЛА будем рассматривать самолет, наводимый на воздушную или наземную цель, или ракету, запускаемую с самолета или с земли и наводимую на ту же цель. Цель может совершать произвольное движение или оставаться неподвижной.
Характер встречи ЛА с целью может быть различным. При мягкой контактной встрече ЛА должен оставаться невредимым. При ударной контактной встрече ЛА разрушается, но при этом уничтожается и цель. Наконец, при бесконтактной встрече воздействие ЛА на цель осуществляется путем стрельбы, бомбометания, пуска ракет, фотографирования и т. д.
Во всех случаях встреча ЛА с целью должна быть достаточно точной. Неточности возникают из-за погрешностей систем наведения и управления, маневрирования цели или организованного противодействия.
При организации встречи ЛА с целью приходится решать ряд задач, которые сводятся к получению информации о движении цели и ЛА, передаче информации на пункты управления и ее переработке, формированию команд управления, наведению и самонаведению ЛА аппарата и др.
На рис. 20 показана функциональная схема системы наведения. Полученная информация о цели вместе с информацией о движении ЛА обрабатывается и на ее основе вырабатываются команды управления, которые используются для организации способов движения ЛА по направлению к цели (методы наведения). Эти команды отрабатываются системой управления (контур управления).
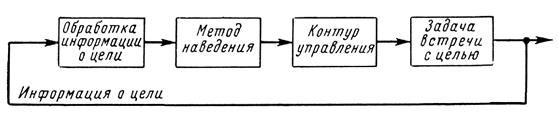
Рис.20. Функциональная схема системы наведения.
Системы автоматического управления при наведении на цели могут быть автономными и неавтономными. В автономных системах отсутствуют текущая информация о цели, а программа управления вводится до старта. В полете производится сравнение текущих значений параметров движения с программными значениями и на этой основе вырабатываются управляющие сигналы. Автономные системы применяются при наведении на неподвижные цели или цели, движение которых достаточно точно можно предсказать. Для наведения на подвижные цели применяются неавтономные системы, поскольку необходимая для управления информация может быть получена за счет информационной связи с наземными станциями наведения или целью. К таким системам относятся системы телеуправления, самонаве дения и комбинированные системы.
Системы телеуправления, в свою очередь, делятся на системы наведения по лучу, командные системы и радионавигационные системы. В системах телеуправления информация о координатах ЛА и цели получается на пункте наведения, где производится формирование управляющих сигналов, передаваемых по линии телеуправления на борт ЛА. В частности, в системах наведения по лучу измерение отклонения ЛА от равносигнальной зоны луча и формирование управляющих сигналов производится на ЛА, а наведение луча на цель осуществляется с пункта наведения. Системы самонаведения характеризуются тем, что информация о координатах цели получается на борту летательного аппарата. Здесь же формируются управляющие сигналы.
Наведение ЛА на цель нередко состоит из двух этапов: дальнего наведения, осуществляемого посредством автономных систем или систем телеуправления, и ближнего наведения, реализуемого системами самонаведения.
Лекция 19.
План
1. Понятие о методе наведения ЛА на цель.
2. Основные кинематические уравнения методов наведения.
5.2. Методы наведения. Основные кинематические уравнения методов наведения.
Способ организации движения ЛА для встречи с целью называется методом наведения. Метод наведения по существу является желаемым законом изменения углового положения вектора скорости ЛА при сближении с целью.
Известны различные методы: прямого наведения, погони, преследования с упреждением, пропорционального сближения, параллельного сближения и накрытия цели. Наведение ЛА на цель совершается в горизонтальной и вертикальной плоскостях, т. е. по двум каналам наведения. В качестве характеристик метода наведения, определяющего идеальные траектории полета ЛА, выбирают время полета, максимальную угловую скорость линии визирования, максимальное нормальное ускорение и полосу частот, необходимую для реализации управления.
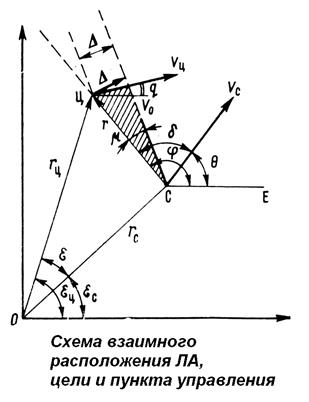
Рис.21.
Для пояснения существа методов наведения обратимся к рис. 21, на котором дано взаимное расположение цели Ц, летательного аппарата С и пункта наведения О.
Векторы скоростей ЛА и цели обозначим через Vc и Vц. Радиусы-векторы rс и rц определяют положения ЛА и цели по отношению к пункту наведения О, а радиус-вектор r и относительная скорость V0 = VC - Vц характеризуют взаимное положение и движение ЛА и цели. Обозначим также:  — угол между линией СЕ (линией горизонта) и радиусом-вектором r;
— угол между линией СЕ (линией горизонта) и радиусом-вектором r;  —угол между радиусом-вектором r и вектором скорости летательного аппарата Vc, называемый углом упреждения;
—угол между радиусом-вектором r и вектором скорости летательного аппарата Vc, называемый углом упреждения;  — угол между радиусами-векторами rс и rц;
— угол между радиусами-векторами rс и rц;  —угол между вектором Vc и линией СЕ;
—угол между вектором Vc и линией СЕ;  —угол между векторами r и V0;
—угол между векторами r и V0;  —мгновенный промах. Метод наведения в значительной мере определяет точность наведения на цель, характеризуемую промахом.
—мгновенный промах. Метод наведения в значительной мере определяет точность наведения на цель, характеризуемую промахом.
Мгновенным промахом называется минимальное расстояние , на котором пройдет ЛА от цели, если, начиная с данного момента времени, ЛА и цель будут двигаться равномерно и прямолинейно с теми скоростями, которые они имеют в рассматриваемый момент времени, или будут двигаться с одинаковыми ускорениями.
Мгновенный промах является векторной величиной , причем, поскольку модуль этого вектора  , то
, то
 (99)
(99)
Если учесть, что  , где
, где  — единичный вектор относительной дальности и
— единичный вектор относительной дальности и  , тогда
, тогда

Но  —угловая скорость линии визирования ЛА — цель, поэтому
—угловая скорость линии визирования ЛА — цель, поэтому
 (100)
(100)
Отсюда следует, что при прочих равных условиях промах тем больше, чем больше угловая скорость линии визирования.
Выразим производную от промаха через ускорения ЛА jc и цели jц Для этого из выражения (99) находим
или, пользуясь тем, что 
 (101)
(101)
Отсюда следует, что для изменения промаха необходимо управлять ускорением ЛА jc. Ускорение цели ju является возмущающим фактором. Для получения уравнений методов наведения выразим составляющие  и
и  вектора относительной скорости
вектора относительной скорости  через проекции скорости цели V ц и ЛА Vc на направление радиуса-вектора
через проекции скорости цели V ц и ЛА Vc на направление радиуса-вектора  (см. рис.21). Находим:
(см. рис.21). Находим:
 (102)
(102)
Это и есть основные кинематические уравнения методов наведения в вертикальной плоскости. Аналогичные уравнения получаются для наведения в горизонтальной плоскости.
Для получения характеристик различных методов наведения необходимо к уравнениям (102) добавить дополнительные соотношения, свойственные этим методам. В дальнейшем в этом разделе будем рассматривать случай горизонтального движения цели, при котором  .
.
Лекция 20.
План
1. Метод погони.
2. Метод прямого наведения.
3. Метод преследования с упреждением.
Метод погони.
Если угол упреждения равен нулю:
 (103)
(103)
т. е. вектор скорости ЛА Vc все время направлен на цель, то получаем метод наведения, называемый методом погони. Для этого метода из уравнений (101) получаем:
 (104)
(104)
Если  , то интегрирование уравнения (104) при начальных условиях
, то интегрирование уравнения (104) при начальных условиях  позволяет получить кинематические траектории соответственно для удаляющейся и приближающейся цели:
позволяет получить кинематические траектории соответственно для удаляющейся и приближающейся цели:
 (105)
(105)
Время полета ЛА к цели может быть найдено, например, путем интегрирования второго уравнения (102), из которого получаем
Воспользовавшись выражением (105), найдем время для удаляющейся и приближающейся цели:
 (106)
(106)
Для получения времени встречи ЛА с целью следует положить  , тогда
, тогда
 (107)
(107)
Из этих выражений видно, что удаляющуюся цель можно перехватить только при  , т. е. когда скорость ЛА больше скорости цели. Для приближающейся цели перехват возможен как при , так и при
, т. е. когда скорость ЛА больше скорости цели. Для приближающейся цели перехват возможен как при , так и при  .
.
На рис. 22 построены траектории полета (кривые погони) цели и ЛА для удаляющейся цели (рис. 22, а) и для приближающейся цели (рис. 22,6). При построении предполагалось, что время встречи tc разделено на равные промежутки  и в течение каждого промежутка скорости цели и ЛА постоянны.
и в течение каждого промежутка скорости цели и ЛА постоянны.
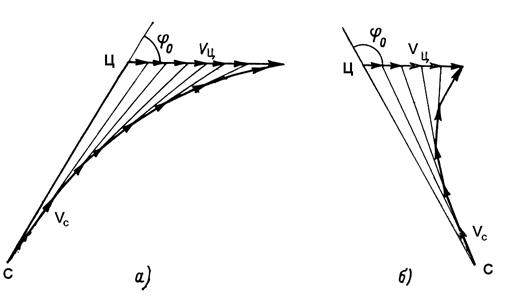
Рис. 22. Траектории полета при наведении по методу погони
Угловая скорость линии визирования в методе погони может быть найдена из второго уравнения (102) и уравнения (105):
 (108)
(108)
Легко видеть, что встреча с приближающейся целью будет при  , а с удаляющейся целью — при
, а с удаляющейся целью — при  .
.
Нормальное ускорение ЛА в методе погони будет
 (109)
(109)
Очевидно, что при  нормальное ускорение в момент встречи конечно, а при
нормальное ускорение в момент встречи конечно, а при  — стремится к бесконечности.
— стремится к бесконечности.
5.4. Методы прямого наведения и преследования с упреждением.
В некоторых случаях реализуется метод наведения, при котором не вектор скорости, а продольная ось ЛА все время направлена на цель. Такой метод называется методом прямого на ведения. Поскольку направление продольной оси отличается от направления вектора скорости  на углы атаки
на углы атаки  и скольжения
и скольжения  , то характеристикой метода прямого наведения будет (в вертикальной плоскости)
, то характеристикой метода прямого наведения будет (в вертикальной плоскости)
 (110)
(110)
Метод наведения, при котором угол между вектором скорости ЛА и линией визирования «ЛА — цель» остается постоянным, называется методом преследования с упреждением. Характеристикой этого метода является
 (111)
(111)
Из уравнений (102) при условии (111) получаем уравнение с разделяющимися переменными
 (112)
(112)
Интегрирование этого уравнения при  , что имеет место в действительности, дает (113):
, что имеет место в действительности, дает (113):
 (113)
(113)
где 
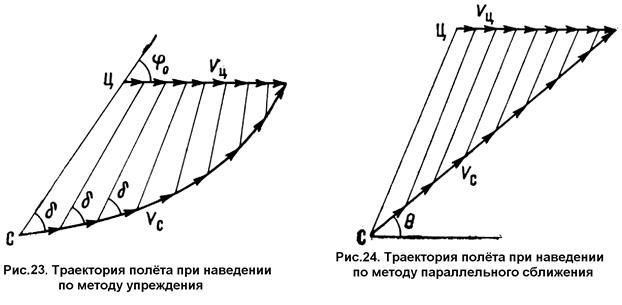
Представление о траекториях полета ЛА и цели дает графическое построение при = const и  =2, приведенное на рис. 23.
=2, приведенное на рис. 23.
Время полета ЛА может быть получено интегрированием первого уравнения системы (102) с учетом выражения (113):
 (114)
(114)
Для определения угловой скорости линий визирования в этом методе необходимо взять второе уравнение системы (102), подставив в него значение  из выражения (113). Находим:
из выражения (113). Находим:
 (115)
(115)
где F(  ) — имеет конечное значение.
) — имеет конечное значение.
Из выражения (115) видно, что угловая скорость  может быть бесконечно большой только при
может быть бесконечно большой только при  . Нормальное ускорение в методе преследования с упреждением находится по формуле (109), в которую необходимо подставить из выражения (115)
. Нормальное ускорение в методе преследования с упреждением находится по формуле (109), в которую необходимо подставить из выражения (115)
Лекция 21.
План
1. Метод параллельного сближения.
2. Метод пропорционального сближения.
3. Метод накрытия цели.
5.5. Метод параллельного сближения.
Метод наведения, при котором линия визирования «ЛА — цель» перемещается параллельно самой себе, называется мето дом параллельного сближения. Если цель движется прямолинейно, то, как видно из построения на рис. 24, траектория ЛА также прямая линия.
Легко видеть, что при этом методе наведения  и
и  (см. рис. 21) или
(см. рис. 21) или
 (116)
(116)
Кинематические соотношения для метода параллельного сближения при условиях и получаются интегрированием уравнений (102):
 (117)
(117)
 (118)
(118)
Так как в рассматриваемом методе наведения угловая скорость линии визирования равна нулю, т. е. , то в соответствии с выражением (109) нормальное ускорение также равно нулю. Если цель движется по криволинейной траектории, то траектория ЛА также будет криволинейной, а ускорение  уже не будет равно нулю.
уже не будет равно нулю.
Для реализации метода параллельного сближения необходимо подавать в систему управления сигнал приращения угловой скорости линии визирования ЛА — цель. Этот сигнал возникает при отклонении вектора скорости V0 от направления в точку встречи на угол  , т. е.
, т. е.
или вследствие малости и использования уравнения (116)
 (119)
(119)
Дата: 2019-02-02, просмотров: 1216.