Изменения динамических параметров и характеристик ЛА вследствие изменения скорости и высоты полета, массы и моментов инерции приводит к тому, что реакция ЛА на внешние возмущения в разных условиях будет различной. Если к ЛА присоединить автопилот с неизменными передаточными числами, то картина качественно не изменится: реакция ЛА с автопилотом на внешние возмущения по-прежнему будет различной. Для получения одинаковой и в общем случае минимальной реакции на внешние возмущения автопилот должен менять свои параметры, приспосабливаясь к внешним условиям. Автопилоты, обладающие свойством приспособления к внешним условиям, называются самонастраивающимися.
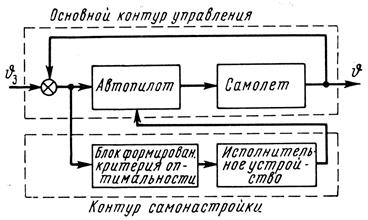
Рис. 12. Функциональная схема самонастраивающегося автопилота
Самонастраивающийся автопилот включает вычислительное устройство, в котором выполняются операции формирования критерия оптимальности, запоминания и сравнения, а также некоторые логические операции. В зависимости от величины критерия оптимальности меняются параметры или структура автопилота.
Летчик, управляющий самолетом, является характерным примером самонастраивающейся системы управления. Покачивая ручку управления, он слегка «возмущает», раскачивает самолет. Это позволяет летчику как бы чувствовать свойства, тенденции изменения поведения самолета и, несмотря на изменение его динамических свойств при наборе высоты или изменении скорости отыскивать оптимальные режимы управления.
Самонастраивающийся автопилот состоит из основного контура управления полетом и контура самонастройки (рис 12) причем последний может быть замкнутым и разомкнутым. Контур самонастройки включает блок формирования критерия оптимальности и поиска оптимума и исполнительное устройство. Его функции сводятся к контролю характеристик системы преобразованию данных контроля в некоторый критерий оптимальности и изменению параметров системы в зависимости от этого критерия.
В качестве критериев оптимальности можно взять время переходного процесса, величину перерегулирования, полосу пропускания, интегральную оценку, коэффициенты ошибок и др. Когда критерий оптимальности сформирован, необходимо найти те значения параметров автопилота, которые обеспечивают получение оптимального переходного процесса в основном контуре управления.
Эту задачу выполняет устройство поиска оптимума. Оно определяет отклонения параметров автопилота от оптимальных значений и по величине отклонений формирует управляющий сигнал, который используется исполнительным устройством для изменения параметров автопилота.
Проведем приближенную оценку влияния режимов полета на динамику поведения самолета. Передаточная функция продольного движения
При изменении высоты от 0 до 25 км коэффициент демпфирования  меняется в 5,5 раз при малом изменении собственной частоты ЛА
меняется в 5,5 раз при малом изменении собственной частоты ЛА  .
.
При автоматическом управлении полетом изменение демпфирования самолета достигается путем применения контуров управления угловой скоростью. Очевидно, что с увеличением высоты полета, когда коэффициент уменьшается; для сохранения приемлемого демпфирования необходимо увеличивать передаточное число по сигналу угловой скорости. Передаточные числа по угловым координатам обычно оставляют неизменными.
Поскольку пропорционально  , то в качестве сигнала для изменения передаточных чисел по угловой скорости (
, то в качестве сигнала для изменения передаточных чисел по угловой скорости (  ) можно использовать скорость полета V . При этом с увеличением высоты полета передаточные числа необходимо увеличивать.
) можно использовать скорость полета V . При этом с увеличением высоты полета передаточные числа необходимо увеличивать.
Контуры самонастройки, осуществляющие коррекцию передаточных чисел по сигналам скорости полета, являются незамкнутыми. На рис. 13 дана структурная схема контура управления с незамкнутым контуром самонастройки. Последний по сигналам полного рп и статического рс давлений формирует сигнал скорости  , используемый для изменения передаточного числа
, используемый для изменения передаточного числа  .
.
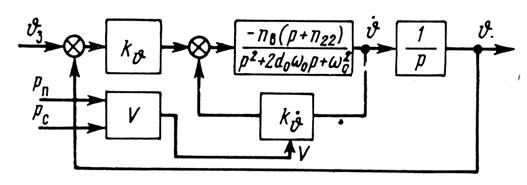
Рис.13. Структурная схема автопилота с незамкнутой системой самонастройки.
Дата: 2019-02-02, просмотров: 720.