Скорость самолета в горизонтальном полете определяется из уравнения
 (88)
(88)
Сила тяги Р и сопротивление X зависят от скорости полета. В установившемся режиме полета сила тяги Р равна силе сопротивления X , т. е. Р = Х. Из этого равенства можно определить величину установившейся скорости полета. В неустановившемся движении величина ускорения dV / dt и характер ее изменения определяются видом функций P ( V ) и X ( V ).
Самолет по отношению к скорости полета может быть устойчивым или неустойчивым в зависимости от взаимного протекания характеристик P ( V ) и X ( V ) в точке их пересечения. Полагая, что скорость  соответствует равенству Р = Х и беря линейные члены разложения функций P ( V ) и X ( V ) в ряды по малым приращениям
соответствует равенству Р = Х и беря линейные члены разложения функций P ( V ) и X ( V ) в ряды по малым приращениям  , преобразуем уравнение (88)к виду
, преобразуем уравнение (88)к виду
 (89)
(89)
Если положить приближенно  , то условие устойчивости самолета по отношению к скорости полета примет вид
, то условие устойчивости самолета по отношению к скорости полета примет вид
 (90)
(90)
Необходимость управления скоростью полета возникает при сверхзвуковых полетах, а также при режимах захода на посадку, при наведении самолетов на цели, при полете в строю и др.
Для управления скоростью полета можно воздействовать на тягу двигателя и на руль высоты. Изменение тяги двигателя достигается его дросселированием, что при наличии объединенного управления сводится к перемещению ручки управления. При воздействии на руль высоты меняется угол атаки, что ведет к изменению силы сопротивления.
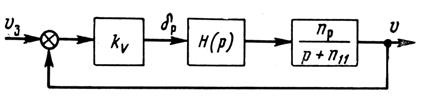
Рис. 18. Структурная схема статического регулирования скорости полета.
Так как авиационный двигатель, используемый в качестве регулирующего фактора при управлении скоростью полета, формирует требуемую тягу с запаздыванием по отношению к перемещению ручки управления, то его динамические характеристики будут влиять на динамику контура управления скоростью полета. Поэтому при исследовании процессов в контуре управления скоростью полета следует учитывать запаздывание в передаче сигналов через двигатель.
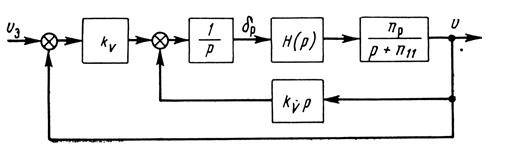
Рис. 19. Структурная схема астатического регулирования скорости полета.
Для автоматического регулирования скорости полета могут быть применены статический и астатический регуляторы (рис. 18 и 19). В качестве чувствительных элементов в этих регуляторах обычно применяются аэрометрические измерители скорости полета, а сигналы ускорений могут быть получены с помощью акселерометров или дифференцирующих устройств. На этих схемах передаточная функция самолета по скорости полета отображена инерционным звеном, а передаточная функция авиадвигателя — звеном  , которое в дальнейшем тоже будем считать инерционным, т. е.
, которое в дальнейшем тоже будем считать инерционным, т. е.  , где
, где  ,
,  -постоянная времени авиадвигателя.
-постоянная времени авиадвигателя.
При рассмотрении динамики процессов управления скоростью полета будем полагать, что угловые движения самолета стабилизируются быстродействующим автопилотом. В таком случае математическая модель самолета как объекта управления по скорости полета может быть представлена уравнением
 (91)
(91)
где  — продольные порывы ветра.
— продольные порывы ветра.
Уравнения движения автоматов скорости с учетом передаточной функции авиадвигателя, как следует из схем (см. рис. 18 и 19), можно представить:
для статической
 (92)
(92)
для астатической системы
 (93)
(93)
где  и
и  —передаточные числа и — сигнал заданной скорости полета.
—передаточные числа и — сигнал заданной скорости полета.
Рассмотрим переходные процессы в статическом автомате скорости полета, для чего решим совместно уравнения (91) и (92). Найдем уравнение замкнутой системы
 (94)
(94)
где 
Поскольку для неустойчивых по скорости полета самолетов  , то условиями устойчивости системы будут:
, то условиями устойчивости системы будут:
 (95)
(95)
Первое условие всегда выполняется, поскольку  . Для выполнения второго условия передаточное число
. Для выполнения второго условия передаточное число  должно удовлетворять условию
должно удовлетворять условию
 (96)
(96)
В случае астатического автомата скорости полета, решая совместно уравнения (91) и (93), получаем
 (97)
(97)
где 
Для устойчивости системы необходимо удовлетворить условиям:
 (98)
(98)
Отсюда следует, что если  , то система структурно неустойчива.
, то система структурно неустойчива.
Можно выбрать такие передаточные числа  и
и  , при которых переходные процессы будут удовлетворительны. Однако, если учесть, что астатический автомат скорости полета более сложен, чем статический, а преимущества его незначительны, то в системах чаще применяют статические автоматы.
, при которых переходные процессы будут удовлетворительны. Однако, если учесть, что астатический автомат скорости полета более сложен, чем статический, а преимущества его незначительны, то в системах чаще применяют статические автоматы.
Дата: 2019-02-02, просмотров: 619.