Лекция 11.
План
1. САУ угловой скоростью.
2. САУ нормальной перегрузкой.
Вектор скорости центра масс ЛА как твердого тела в каждый момент времени направлен по касательной к траектории полета. Следовательно, для изменения направления траектории полета в пространстве необходимо менять направление вектора скорости. Направление вектора скорости определяется направлением вектора тяги двигателей и аэродинамическими характеристиками ЛА. Вектор тяги обычно ориентируется по отношению к корпусу ЛА и на большинстве режимов полета его направление остается неизменным.
Аэродинамические характеристики ЛА (подъемная сила, боковая сила, сила лобового сопротивления и др.) зависят от углового положения вектора тяги по отношению к вектору скорости. Так, например, для изменения подъемной или боковой сил необходимо изменять углы между векторами тяти и скорости полета в вертикальной (угол атаки) или горизонтальной (угол скольжения) плоскостях.
Таким образом, вектор тяги на данном режиме полета должен занимать определенное положение по отношению к вектору скорости. Поскольку, вектор тяги связан с осями ЛА, то можно говорить, что ЛА должен занимать определенное угловое положение по отношению к вектору скорости. Придание ЛА определенных угловых положений (углы тангажа, крена, рыскания, атаки, скольжения и их производные), осуществляемое человеком или специальной системой, составляет основную задачу управления угловыми движениями.
САУ угловой скоростью.
Контуры управления угловыми скоростями ЛА, служат для формирования демпфирующих моментов и, следовательно, для улучшения качества переходного процесса.
Рассмотрим систему управления угловой скоростью тангажа, представленную структурной схемой на рисунке 3.
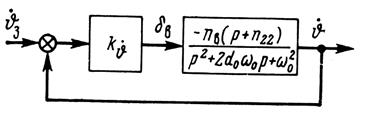
Рис. 3. Структурная схема системы управления угловой скоростью тангажа.
В этой схеме закон управления принят в виде
 (48)
(48)
где  — передаточное число;
— передаточное число;  — заданная угловая скорость тангажа, а передаточная функция ЛА по угловой скорости представлена в прямоугольнике.
— заданная угловая скорость тангажа, а передаточная функция ЛА по угловой скорости представлена в прямоугольнике.
Передаточная функция системы, как следует из рис.3 имеет вид:
 (49)
(49)
Здесь
 (50)
(50)
где  и
и  — соответственно собственная частота и коэффициент затухания ЛА.
— соответственно собственная частота и коэффициент затухания ЛА.
Для выбора передаточного числа  заметим, что наилучшее качество процесса в колебательном звене получается при
заметим, что наилучшее качество процесса в колебательном звене получается при  . Исключая из уравнений (50) частоту
. Исключая из уравнений (50) частоту  , получим выражение для :
, получим выражение для :
 (51)
(51)
Аналогичные рассуждения имеют место при рассмотрении систем управления угловой скоростью рысканья и крена.
САУ нормальной перегрузкой.
В ряде случаев системы управления полетом ЛА включают контуры управления перегрузками или, точнее говоря, ускорениями центра масс. Такие контуры управления являются внешними по отношению к контурам управления угловыми скоростями.
Поскольку, нормальная и боковая перегрузки пропорциональны соответственно углам атаки и скольжения, то контуры управления перегрузкой эквивалентны контурам управления углами  и
и  .
.
Рассмотрим нормальные и боковые ускорения, которые определяются скоростью изменения углов наклона траектории в вертикальной и горизонтальной плоскостях:
 (52)
(52)
где 
Если воспользоваться первыми из уравнений (19) и (27), то получим (при условии  и
и  ):
):
 (53)
(53)
Передаточные функции самолета по ускорениям jy и  при входах
при входах  и
и  можно получить из передаточных функций (20) и (28) и соотношений (53):
можно получить из передаточных функций (20) и (28) и соотношений (53):
 (54)
(54)
 (55)
(55)
Рассмотрим систему стабилизации нормального ускорения (рис. 4).
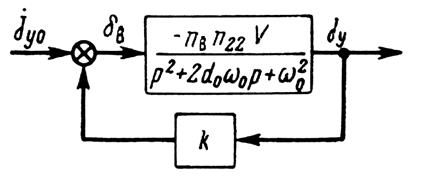
Рис.4. Система управления нормальным ускорением.
Для измерения ускорений  и можно применить акселерометры, оси чувствитель-ности которых совпадают соответственно с нормальной
и можно применить акселерометры, оси чувствитель-ности которых совпадают соответственно с нормальной  и поперечной
и поперечной  осями самолета.
осями самолета.
Запишем закон управления в соответствии со схемой рис. 4
 (56)
(56)
Уравнение движения системы будет
 (57)
(57)
Отсюда видно, что при принятом законе управления (56) обеспечивается повышение запаса статической устойчивости ЛА. Такой же эффект будет при введении в закон управления угла атаки а вместо нормального ускорения jy . Демпфирование же ЛА будет неудовлетворительным. Для получения приемлемого переходного процесса контур управления ускорением необходимо применять совместно с контуром управления угловой скоростью. Сказанное здесь об управлении нормальным ускорением целиком относится к управлению боковым ускорением.
Лекция 12.
План
1. САУ углом тангажа посредством статического автопилота.
2. САУ углом тангажа посредством астатического автопилота.
3. САУ углом тангажа посредством изодромного автопилота.
Дата: 2019-02-02, просмотров: 569.