Для вывода линеаризованных уравнений установим зависимость сил и моментов от величин  .
.
Сила тяги двигателя  зависит от параметров двигателя и внешних условий, определяемых скоростью полета
зависит от параметров двигателя и внешних условий, определяемых скоростью полета  , давлением
, давлением  и температурой
и температурой  атмосферы и др. Для воздушно-реактивных двигателей можно написать
атмосферы и др. Для воздушно-реактивных двигателей можно написать
 (7)
(7)
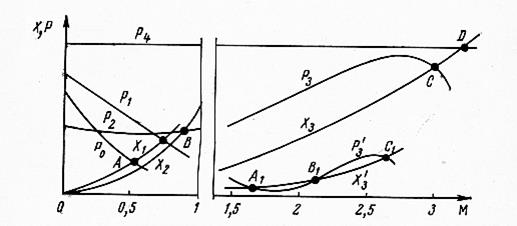
Рис. 8. Графики зависимости тяги двигателей от числа М
На рис. 8 показана примерная зависимость силы тяги  от числа М полета для поршневых ПД (
от числа М полета для поршневых ПД (  ), турбовинтовых, ТВД (
), турбовинтовых, ТВД (  ), турбореактивных ТРД (
), турбореактивных ТРД (  - дозвуковые,
- дозвуковые,  — сверхзвуковые) и жидкостно-реактивных ЖРД двигателей.
— сверхзвуковые) и жидкостно-реактивных ЖРД двигателей.
Аэродинамические силы и моменты принято представлять в виде:


 (8)
(8)
где  скоростной напор;
скоростной напор;  и
и  — соответственно коэффициенты лобового сопротивления и подъемной силы;
— соответственно коэффициенты лобового сопротивления и подъемной силы;  — коэффициент момента тангажа;
— коэффициент момента тангажа;  — длина средней аэродинамической хорды крыла;
— длина средней аэродинамической хорды крыла;  — площадь крыльев.
— площадь крыльев.
Зависимость силы лобового сопротивления  от числа М для самолетов с ПД и ТВД, ТРД и ЖРД также показана на рис. 8.
от числа М для самолетов с ПД и ТВД, ТРД и ЖРД также показана на рис. 8.
Коэффициенты и зависят от  , а коэффициент
, а коэффициент  — от
— от  .
.
Возмущающие силы  и
и  и момент
и момент  , действующие на ЛА, обусловлены горизонтальными и вертикальными порывами ветра (характеризуемыми величинами
, действующие на ЛА, обусловлены горизонтальными и вертикальными порывами ветра (характеризуемыми величинами  и
и  ), изменениями веса
), изменениями веса  (сброс грузов и др.), импульсными возмущениями
(сброс грузов и др.), импульсными возмущениями  ,
,  и
и  , вызванными разрывами вблизи ЛА и др. Порывы ветра изменяют действующие на ЛА аэродинамические силы и моменты. Для приближенной оценки реакции ЛА на указанные возмущения пренебрежем изменением моментов и заменим изменения аэродинамических сил вследствие порывов ветра эквивалентными им ускорениями. Тогда:
, вызванными разрывами вблизи ЛА и др. Порывы ветра изменяют действующие на ЛА аэродинамические силы и моменты. Для приближенной оценки реакции ЛА на указанные возмущения пренебрежем изменением моментов и заменим изменения аэродинамических сил вследствие порывов ветра эквивалентными им ускорениями. Тогда:
 (9)
(9)
где  — расстояние центра масс сбрасываемого груза до центра масс ЛА.
— расстояние центра масс сбрасываемого груза до центра масс ЛА.
Для линеаризации уравнений (1)÷ (6) предположим, что невозмущенное движение летательного аппарата характеризуется параметрами  удовлетворяющими тем же уравнениям. В качестве невозмущенного движения можно взять горизонтальный полет с постоянной скоростью, полет с заданным наклоном траектории, полет при известном программном изменении некоторых из величин, например, или
удовлетворяющими тем же уравнениям. В качестве невозмущенного движения можно взять горизонтальный полет с постоянной скоростью, полет с заданным наклоном траектории, полет при известном программном изменении некоторых из величин, например, или  и т. д.
и т. д.
Пусть в некоторый момент времени вследствие возмущений, действующих на ЛА, имеем:
 ,…,
,…,
где  - малые приращения указанных параметров.
- малые приращения указанных параметров.
Из этих выражений видно, что движение ЛА можно представить состоящим из невозмущенного движения и малых отклонений от него.
Разлагая силы  ,
,  ,
,  и момент
и момент  в ряды Тейлора по малым приращениям и ограничиваясь линейными членами приращений, получим:
в ряды Тейлора по малым приращениям и ограничиваясь линейными членами приращений, получим:
где члены с верхними индексами обозначают частные производные по соответствующим переменным в окрестности невозмущенного движения, которое обозначено нижним индексом «0».
Лекция 6.
План
1. Линеаризация уравнений продольного движения ЛА.
2. Частные случаи продольного движения ЛА.
Для частных производных, входящих в уравнения (10), можно с учетом выражений (8) написать:
 (11)
(11)
Здесь  - число Маха, где
- число Маха, где  - скорость звука.
- скорость звука.
При дальнейших преобразованиях воспользуемся тем, что
 (12)
(12)
Используемый в формулах параметр  является функцией высоты:
является функцией высоты:
 (13)
(13)
где  ;
;  — градиент температуры;
— градиент температуры;  — газовая постоянная; Тн — температура на высоте
— газовая постоянная; Тн — температура на высоте  ;
;  и
и  — температура и плотность атмосферы на уровне моря. После этого находим:
— температура и плотность атмосферы на уровне моря. После этого находим:
 (14)
(14)
В целях сокращения записи введем относительные величины:
 (15)
(15)
где  - аэродинамическая постоянная времени ЛА.
- аэродинамическая постоянная времени ЛА.
Вместо приращений  будем писать
будем писать  , придавая последним величинам смысл тех же приращений.
, придавая последним величинам смысл тех же приращений.
Уравнения (10) с учетом введенных обозначений можно представить в виде:
 (16)
(16)
здесь

 - радиус инерции самолета.
- радиус инерции самолета.
Система дифференциальных уравнений (16) является линейной математической моделью продольного движения лета тельного аппарата.
Дата: 2019-02-02, просмотров: 630.