До сих пор предполагалось, что ЛА является абсолютно жестким телом. Такое предположение справедливо до тех пор, пока собственные частоты замкнутой системы автопилот — ЛА значительно ниже наименьшей частоты собственных изгибных колебаний корпуса ЛА. Современные ЛА отличаются длинным фюзеляжем, тонкими крыльями, что при больших скоростных напорах приводит к возникновению аэроупругих колебаний. Аэроупругие колебания, возникающие в результате взаимодействия упругих и аэродинамических сил, совершаются с частотами, близкими к собственным изгибным колебаниям конструкции (фюзеляжа, крыльев).
Изгибные колебания ЛА могут возбуждаться не только аэродинамическими силами, но также отклонением органов управления.
Изгибные колебания, независимо от вызвавшей их причины, нежелательны, а в ряде случаев недопустимы. При их появлении, особенно в управляемом полете, летательный аппарат подвергается сильным возмущениям, которые могут привести к разрушению конструкции. Когда частоты упругих колебаний близки к частотам пропускания контуров управления, могут возникать неустойчивые режимы.
Летательный аппарат, как сложная распределенная система, имеет различные типы свободных колебаний. Для того чтобы это понять, можно рассмотреть различные формы упругих линий фюзеляжа и крыльев (рис. 12).
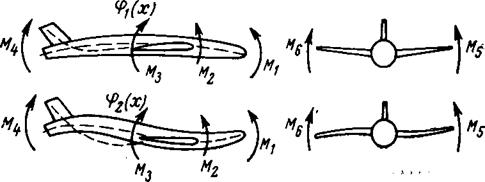
Рис.12.
На рисунке показаны  и
и  — упругие линии фюзеляжа;
— упругие линии фюзеляжа;
 ,...,
,...,  — аэродинамические моменты, действующие на фюзеляж и крылья.
— аэродинамические моменты, действующие на фюзеляж и крылья.
Принцип действия, схемы и характеристики систем управления летательными аппаратами.
Лекция 9.
План
1. Состав систем автоматического управления летательными аппаратами. Требования, предъявляемые к ним.
2. Законы управления автопилотов.
Состав систем автоматического управления летательными аппаратами. Требования, предъявляемые к ним.
Система автоматического управления полетом ЛА (рис. 1) состоит из датчиков, предназначенных для получения информации о режимах и условиях полета; вычислителей и корректирующих устройств, служащих для переработки информации и формирования законов управления; усилительных устройств и исполнительных механизмов (рулевых машин), служащих для усиления сигналов и передачи на органы управления; устройств для формирования программы управления; устройств для контроля работы системы и т. д.
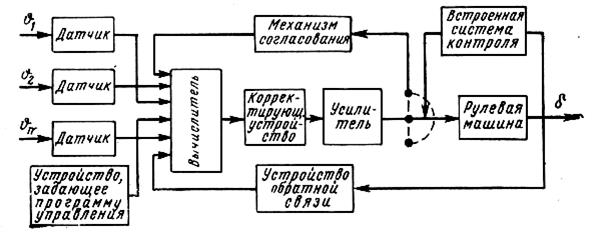
Рис. 1. Функциональная схема САУ
Структурные особенности САУ оцениваются ее законом управления, под которым подразумевают требуемую зависимость выходных сигналов исполнительных механиз-мов от совокупности входных сигналов. В реальных системах эта зависимость отлича-ется от закона управления вследствие того, что элементы системы обладают динами-ческими погрешностями и имеют статические характеристики, отличные от расчетных.
Системы автоматического управления обеспечивают стабилизацию и управление угловыми движениями и движениями центра масс, а также управление некоторыми параметрами режима полета. Системы автоматического управления полетом должны:
1) —улучшать устойчивость и управляемость ЛА на всех режимах полета как при ручном, так и автоматическом управлении. Для этой цели система должна включать автоматы устойчивости (если такие необходимы) и демпферные устройства;
2) —обеспечивать управление угловыми движениями ЛА, движением центра масс, наведение на цели. Для этого САУ должна быть связана с навигационной системой, прицелом, системой наведения и др.;
3) —быть пригодной для включения в работу в любом положении ЛА и выводить ЛА в горизонтальный полет при допустимых перегрузках;
4) —иметь связь с системой управления при посадке и взлете;
5) —для стабилизации скорости при сверхзвуковых полетах и на посадочных режимах включать канал управления скоростью с подачей сигналов на руль высоты и в некоторых случаях на тягу двигателей;
6) —предусматривать устройства для ограничения предельных режимов по перегрузкам, углам крена, угловым скоростям;
7) —предусматривать коррекцию передаточных чисел по режимам полета, а при широком диапазоне изменения параметров ЛА система управления должна быть самонастраивающейся;
8) —иметь связь с системой управления строем самолетов;
9) —обеспечивать выбор и поддержание оптимальных режимов полета (минимальное время полета, максимальная дальность, оптимальная траектория, автоматическое маневрирование для
увеличения живучести и т. д.);
10) —работать в принятых для Л А окружающих внешних условиях (температуры, перегрузки, давления, влажности и др.);
11) —быть комплексной с широким использованием принципов оптимальной информационной и структурной избыточности для повышения надежности при достаточной схемной и конструктивной простоте.
Система автоматического управления должна обладать достаточной поэлементной и схемной надежностью. Отказы САУ могут привести к односторонней перекладке рулей, что приводит к выходу самолета на опасные режимы. Для индикации отказов САУ применяются устройства встроенного контроля, которые должны обеспечивать безопасность автоматически управляемого полета.
Дата: 2019-02-02, просмотров: 617.