Из рассмотрения задач, выполняемых системами автоматического управления, видно, что они должны состоять из ряда автоматических устройств. На пилотируемых ЛА (самолеты вертолеты) к числу этих устройств относятся автоматы управления, ав топилоты, автоматы тяги и командные системы управления.
Автоматы управления (демпферы крена, тангажа и рыскания, автоматы устойчивости) служат для улучшения динамических характеристик - управляемости и устойчивости ЛА. При применении автоматов управления ручное управление ЛА становится легким и точным.
Автоматические устройства, воздействующие на управляющие органы самолета (рули высоты и направления, элероны и т.д.) и обеспечивающие автоматическое пилотирование, называются автопилотами. Близкими по своим функциям являются автоматы тяги - автоматические устройства, служащие для управления скоростью полета.
Командные системы управления служат для обработки разнообразной пилотажно-навигационной информации, необходимой для управления на траектории полета, и выдачи ее летчику в удобном для управления виде или подачи ее в автопилот. При применении командных систем роль летчика сводится к отработке сформированных командных сигналов.
Совокупность указанных автоматических устройств образует систему автоматического управления (САУ) пилотируемых ЛА. Эта система может также включать ряд дополнительных устройств, обеспечивающих управление аэроупругими колебаниями, теплогазодинамическим взаимодействием ЛА со средой, управление полетом в строю и др.
Понятие об автопилоте.
Системы автоматического управления беспилотных ЛА обычно включают автопилот и ряд автоматических устройств обеспечивающих наведение на цель, маневрирование и т.д. Иногда автопилот, включающий каналы управления угловыми движениями и скоростью полета, называют автоматом стабилизации, а автоматическое устройство наведения на цель - системой наведения. При такой трактовке САУ беспилотных ЛА состоит из автомата стабилизации и системы наведения. В этих системах отсутствуют бортовые командные системы управления, предусматривающие непосредственное участие человека в замкнутом контуре управления.
Автопилот является одним из важнейших элементов любой САУ. Автопилоты различаются структурными особенностями, законами управления, формой сигналов — носителей информации, числом каналов управления и др.
Принцип действия автопилота виден из схемы системы управления самолетом, показанной на рис. 4. Информация об углах  и угловых скоростях
и угловых скоростях  (крена, рыскания и тангажа) от измерительных систем (см. табл. 1) подается в блок формирования команд системы управления. Вырабатываемые в блоке команды поступают на рулевые машины РМЭ, РМН и РМС которые изменяют соответственно положение элеронов, руля направления и стабилизатора в таком направлении, чтобы устранить изменения угловых координат и скоростей.
(крена, рыскания и тангажа) от измерительных систем (см. табл. 1) подается в блок формирования команд системы управления. Вырабатываемые в блоке команды поступают на рулевые машины РМЭ, РМН и РМС которые изменяют соответственно положение элеронов, руля направления и стабилизатора в таком направлении, чтобы устранить изменения угловых координат и скоростей.
В блок формирования команд подаются также сигналы обратной связи, пропорциональные углам отклонения рулевых органов  .
.
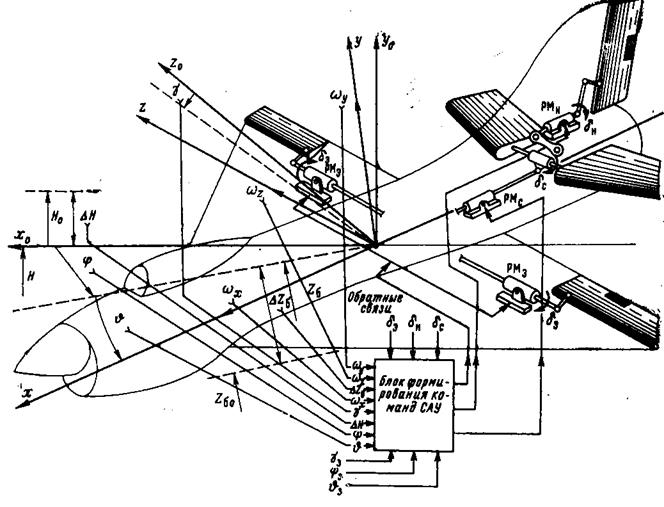
Рис. 4. Функциональная схема системы управления самолетом.
В ряде случаев в блок формирования команд подаются сигналы ускорений (перегрузок), предельных значений параметров режима полета и т. д.
Если необходимо стабилизировать координаты центра масс ЛА (высоту полета  и боковое отклонение
и боковое отклонение  ), то помимо угловых координат и скоростей измеряют величины
), то помимо угловых координат и скоростей измеряют величины  и
и  , где
, где  и
и  — требуемые значения высоты и боковой координаты. В этом случае система управления будет работать до тех пор, пока рассогласования
— требуемые значения высоты и боковой координаты. В этом случае система управления будет работать до тех пор, пока рассогласования  и
и  не будут устранены.
не будут устранены.
Система управления позволяет автоматически выполнять угловые маневры. Для этого в блок формирования команд задаются углы  как функции времени и система управления полетом, исполняя команды, обеспечивает выполнение равенств:
как функции времени и система управления полетом, исполняя команды, обеспечивает выполнение равенств:  , то есть в этом случае система управления работает в режиме слежения.
, то есть в этом случае система управления работает в режиме слежения.
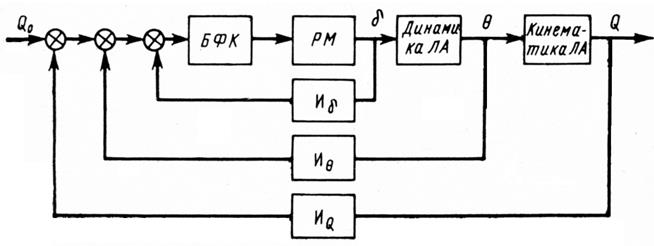
Рис. 5. Структурная схема системы управления полетом
Если сигналы  формируются в системе наведения (самонаведения) на основе информации от цели, то система управления обеспечивает наведение ЛА на цель (воздушную или наземную). При управлении строем летательных аппаратов сигналы
формируются в системе наведения (самонаведения) на основе информации от цели, то система управления обеспечивает наведение ЛА на цель (воздушную или наземную). При управлении строем летательных аппаратов сигналы  вырабатываются в системе измерения дистанции, интервала и превышения. Следует только указать, что при управлении строем в системе управления необходимо сформировать еще один канал — канал управления скоростью полета путем изменения тяги двигателей.
вырабатываются в системе измерения дистанции, интервала и превышения. Следует только указать, что при управлении строем в системе управления необходимо сформировать еще один канал — канал управления скоростью полета путем изменения тяги двигателей.
Из рассмотрения схемы следует, что система автоматического управления полетом ЛА является многоканальной (число каналов равно числу рулевых органов), причем все каналы, замыкаемые через звенья, отображающие динамику и кинематику ЛА, оказываются связанными между собой. Каждый канал управления, в свою очередь, является многоконтурным. На рис. 5 дана структурная схема системы управления полетом.
Основными элементами системы управления являются: датчики информации  соответственно о координатах рулевых органов, параметрах, характеризующих динамику ЛА, и параметрах, характеризующих его кинематику; блок формирования команд (БФК), включающий вычислительные, преобразовательные, усилительные и другие устройства; рулевые машины (РМ).
соответственно о координатах рулевых органов, параметрах, характеризующих динамику ЛА, и параметрах, характеризующих его кинематику; блок формирования команд (БФК), включающий вычислительные, преобразовательные, усилительные и другие устройства; рулевые машины (РМ).
Динамические свойства замкнутой системы, включающей САУ и ЛА, определяются динамическими свойствами составляющих ее элементов и способами их соединения.
Лекция 4.
План
1. Системы координат, применяемые для определения положения ЛА.
2. Углы, применяемые для определения положения ЛА.
1.7. Системы координат, применяемые для определения положения ЛА.
Летательный аппарат будем рассматривать как материальную точку - в задачах навигации или как твердое тело, систему твердых тел, упругое тело — в задачах управления полетом.
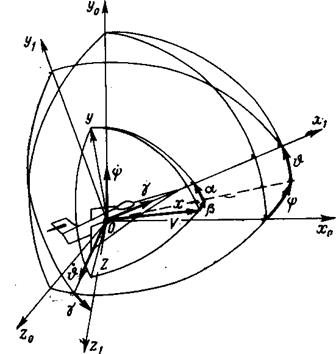
Рис. 6. Система координат
Движение ЛА как твердого тела можно рассматривать как сложное — движение центра масс и движение вокруг центра масс. Для характеристики движения в любой момент времени необходимо иметь шесть координат как функций времени: три координаты движения центра масс и три угловые координаты. При больших скоростях полета в пределах атмосферы на ЛА воздействуют значительные аэродинамические силы и моменты, что приводит к упругим деформациям аппарата и изменению его аэродинамических характеристик. В этом случае на движение ЛА как твердого тела накладываются упругие деформации. В ряде случаев размещенные внутри ЛА тела совершают движения, поэтому аппарат приходится рассматривать как систему твердых тел.
Для определения положения ЛА будем применять следующие системы прямоугольных координат (рис. 6):
— неподвижную систему  , начало которой совпадает с центром масс ЛА, ось
, начало которой совпадает с центром масс ЛА, ось  направлена по вертикали, а оси
направлена по вертикали, а оси  и
и  горизонтальны и имеют фикси-рованное направление по отношению к земле;
горизонтальны и имеют фикси-рованное направление по отношению к земле;
— связанную систему  с началом в центре масс ЛА, оси которой направлены по главным осям инерции аппарата: ось
с началом в центре масс ЛА, оси которой направлены по главным осям инерции аппарата: ось  — по продольной оси, ось
— по продольной оси, ось  — в плос-кости симметрии, ось
— в плос-кости симметрии, ось  перпендикулярна к плоскости симметрии;
перпендикулярна к плоскости симметрии;
— скоростную систему  с началом в центре масс ЛА, ось
с началом в центре масс ЛА, ось  которой направлена по вектору скорости V, ось
которой направлена по вектору скорости V, ось  —в плоскости симметрии, ось
—в плоскости симметрии, ось  перпендикулярна к плоскости симметрии.
перпендикулярна к плоскости симметрии.
1.8. Углы, применяемые для определения положения ЛА.
Положение связанной системы по отношению к неподвижной системе  характеризуется углами Эйлера
характеризуется углами Эйлера  . Угол
. Угол  образуемый при повороте ЛА вокруг продольной оси относительно положения, при котором поперечная ось
образуемый при повороте ЛА вокруг продольной оси относительно положения, при котором поперечная ось  горизонтальна, называется углом крена; угол
горизонтальна, называется углом крена; угол  , образуемый проекцией продольной оси на горизонтальную плоскость и заданным направлением
, образуемый проекцией продольной оси на горизонтальную плоскость и заданным направлением  , называется углом рыскания; угол
, называется углом рыскания; угол  , образуемый продольной осью ЛА с горизонтальной плоскостью, называется углом тангажа.
, образуемый продольной осью ЛА с горизонтальной плоскостью, называется углом тангажа.
Положение вектора воздушной скорости V относительно связанной системы характеризуется углом атаки  , т. е. углом между проекцией указанного вектора на плоскость симметрии и продольной осью, и углом скольжения
, т. е. углом между проекцией указанного вектора на плоскость симметрии и продольной осью, и углом скольжения  между вектором воздушной скорости и плоскостью симметрии. Общее движение ЛА можно разделить на продольное и боковое движения. Продольным называется движение, характеризуемое вращением вокруг поперечной оси и поступательным движением в направлении осей и
между вектором воздушной скорости и плоскостью симметрии. Общее движение ЛА можно разделить на продольное и боковое движения. Продольным называется движение, характеризуемое вращением вокруг поперечной оси и поступательным движением в направлении осей и  Боковое движение составляют вращения вокруг осей и и перемещение в направлении оси .
Боковое движение составляют вращения вокруг осей и и перемещение в направлении оси .
Поскольку движение ЛА непрерывно возмущается действующими на него силами и моментами, то для управления движением необходимо воздействовать на эти силы и моменты, изменяя их по требуемым законам. В качестве управляемых параметров выбирают угловые координаты и координаты центра масс, скорости, ускорения и др. Регулирующими факторами обычно являются углы отклонения рулей высоты  и направления
и направления  , элеронов
, элеронов  , стабилизатора
, стабилизатора  , угол отклонения дросселя двигателя
, угол отклонения дросселя двигателя  и т.д.
и т.д.
Ниже выводятся линеаризованные уравнения движения ЛА и определяются динамические характеристики, позволяющие оценивать реакцию аппарата на возмущения, а также рассматриваются возмущения, действующие на ЛА при полете в атмосфере.
Лекция 5.
План
1. Уравнения продольного движения ЛА.
2. Линеаризация уравнений продольного движения ЛА.
Дата: 2019-02-02, просмотров: 629.