КОНСПЕКТ ЛЕКЦИЙ
по дисциплине
Системы управления летательными аппаратами
Направление подготовки: 160400 «Системы управления движением и навигация»
Специальность: 160403 «Системы управления летательными аппаратами»
Формы обучения очная
Тула 2009 г.
Рассмотрено на заседании кафедры
протокол №_1_ от "28" августа 2009 г.
Зав. кафедрой________________О.В. Горячев
СОДЕРЖАНИЕ
1..... Математические модели и динамические характеристики летательных аппаратов. 6
Лекция 1. 6
1.1. Краткая характеристика летательных аппаратов. 6
1.2. Рулевые органы летательных аппаратов. 7
Лекция 2. 10
1.3. Цели и задачи управления полетом ЛА. 10
1.4. Информация, необходимая для функционирования систем управления. 13
Лекция 3. 15
1.5. Классификация автоматических устройств летательных аппаратов. 15
1.6. Понятие об автопилоте. 16
Лекция 4. 19
1.7. Системы координат, применяемые для определения положения ЛА. 19
1.8. Углы, применяемые для определения положения ЛА. 21
Лекция 5. 22
1.9. Уравнения продольного движения ЛА. 22
1.10. Линеаризация уравнений продольного движения ЛА. 24
Лекция 6. 27
1.11. Частные случаи продольного движения ЛА. 29
Лекция 7. 31
1.12.Передаточные функции и частотные характеристики продольного движения ЛА. 31
1.13. Уравнения бокового движения ЛА. Частные случаи бокового движения. Передаточные функции. 33
Лекция 8. 35
1.14. Особенности динамических характеристик летательных аппаратов с двумя плоскостями симметрии. 35
1.15. Динамические свойства летательных аппаратов при учете нежесткости конструкции. 38
2. Принцип действия, схемы и характеристики систем управления летательными аппаратами. 39
Лекция 9. 39
2.1. Состав систем автоматического управления летательными аппаратами. Требования, предъявляемые к ним. 39
2.2. Законы управления автопилотов. 41
Лекция 10. 43
2.3. Принцип действия автопилотов. 44
3..... Динамика автоматического управления угловыми движениями летательного аппарата. Устойчивость, статические и динамические ошибки процессов управления. 46
Лекция 11. 46
3.1. САУ угловой скоростью. 47
3.2. САУ нормальной перегрузкой. 48
Лекция 12. 50
3.3. САУ углом тангажа посредством статического автопилота. 50
3.4. САУ углом тангажа посредством астатического автопилота. 51
3.5. САУ углом тангажа посредством изодромного автопилота. 52
Лекция 13. 53
3.6. САУ углом курса. 53
Лекция 14. 56
3.7. САУ углом крена. 56
3.8. Принципы построения самонастраивающихся автопилотов. 57
4..... Динамика автоматического управления движением центра масс летательного аппарата. Управление траекторией полета ЛА на маршруте, при заходе на посадку. 60
Лекция 15. 60
4.1. Управление и стабилизация высоты полета. 61
Лекция 16. 65
4.2. Управление высотой полета низколетящих самолетов. 65
4.3. Управление боковым движением центра масс самолета. 67
Лекция 17. 68
4.4. Управление и стабилизация скорости полета. 68
5..... Автоматическое наведение летательных аппаратов на цели. 72
Лекция 18. 72
5.1. Классификация систем автоматического наведения ЛА на цели. Задачи, возникающие при автоматическом наведении, пути их решения. 72
Лекция 19. 74
5.2. Методы наведения. Основные кинематические уравнения методов наведения. 74
Лекция 20. 77
5.3. Метод погони. 77
5.4. Методы прямого наведения и преследования с упреждением. 79
Лекция 21. 81
5.5. Метод параллельного сближения. 81
5.6. Метод пропорционального сближения. 82
5.7. Метод накрытия цели. 83
Лекция 22. 85
5.8. Принципы построения систем самонаведения. 85
Лекция 23. 88
5.9. Принципы построения систем телеуправления. 89
Лекция 24. 90
5.10. Система наведения с радиовизированием цели. 90
Лекция 25. 94
5.11. Понятие о беспилотном летательном аппарате. 94
5.12. Структура и классификация БЛА. 95
Математические модели и динамические характеристики летательных аппаратов.
Лекция 1.
План
1. Краткая характеристика летательных аппаратов.
2. Рулевые органы летательных аппаратов.
Рассмотрим краткие сведения об особенностях управления летательными аппаратами (ЛА) и общих требованиях к управляемому полету, об информационных характеристиках процессов управления и аппаратуре для получения информации, а также проведем классификацию средств автоматического управления.
Понятие об автопилоте.
Системы автоматического управления беспилотных ЛА обычно включают автопилот и ряд автоматических устройств обеспечивающих наведение на цель, маневрирование и т.д. Иногда автопилот, включающий каналы управления угловыми движениями и скоростью полета, называют автоматом стабилизации, а автоматическое устройство наведения на цель - системой наведения. При такой трактовке САУ беспилотных ЛА состоит из автомата стабилизации и системы наведения. В этих системах отсутствуют бортовые командные системы управления, предусматривающие непосредственное участие человека в замкнутом контуре управления.
Автопилот является одним из важнейших элементов любой САУ. Автопилоты различаются структурными особенностями, законами управления, формой сигналов — носителей информации, числом каналов управления и др.
Принцип действия автопилота виден из схемы системы управления самолетом, показанной на рис. 4. Информация об углах  и угловых скоростях
и угловых скоростях  (крена, рыскания и тангажа) от измерительных систем (см. табл. 1) подается в блок формирования команд системы управления. Вырабатываемые в блоке команды поступают на рулевые машины РМЭ, РМН и РМС которые изменяют соответственно положение элеронов, руля направления и стабилизатора в таком направлении, чтобы устранить изменения угловых координат и скоростей.
(крена, рыскания и тангажа) от измерительных систем (см. табл. 1) подается в блок формирования команд системы управления. Вырабатываемые в блоке команды поступают на рулевые машины РМЭ, РМН и РМС которые изменяют соответственно положение элеронов, руля направления и стабилизатора в таком направлении, чтобы устранить изменения угловых координат и скоростей.
В блок формирования команд подаются также сигналы обратной связи, пропорциональные углам отклонения рулевых органов  .
.
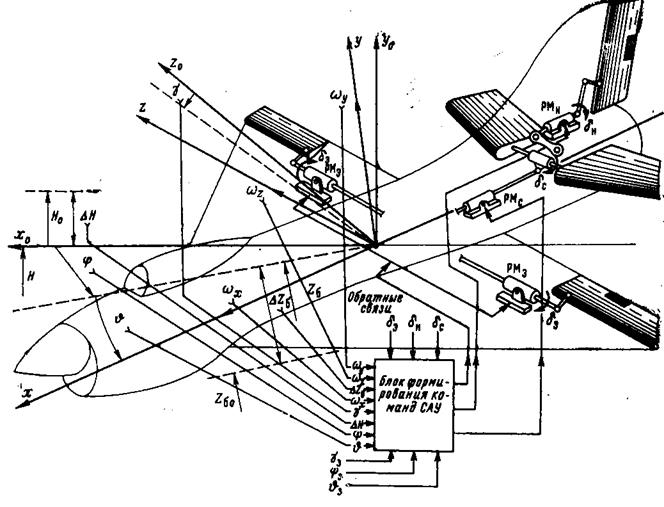
Рис. 4. Функциональная схема системы управления самолетом.
В ряде случаев в блок формирования команд подаются сигналы ускорений (перегрузок), предельных значений параметров режима полета и т. д.
Если необходимо стабилизировать координаты центра масс ЛА (высоту полета  и боковое отклонение
и боковое отклонение  ), то помимо угловых координат и скоростей измеряют величины
), то помимо угловых координат и скоростей измеряют величины  и
и  , где
, где  и
и  — требуемые значения высоты и боковой координаты. В этом случае система управления будет работать до тех пор, пока рассогласования
— требуемые значения высоты и боковой координаты. В этом случае система управления будет работать до тех пор, пока рассогласования  и
и  не будут устранены.
не будут устранены.
Система управления позволяет автоматически выполнять угловые маневры. Для этого в блок формирования команд задаются углы  как функции времени и система управления полетом, исполняя команды, обеспечивает выполнение равенств:
как функции времени и система управления полетом, исполняя команды, обеспечивает выполнение равенств:  , то есть в этом случае система управления работает в режиме слежения.
, то есть в этом случае система управления работает в режиме слежения.
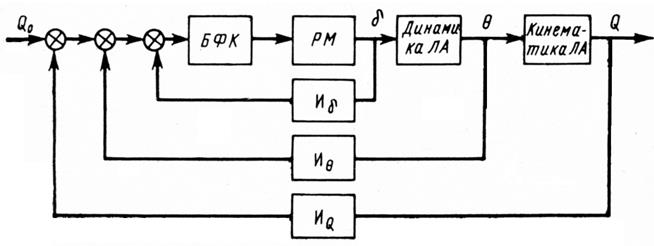
Рис. 5. Структурная схема системы управления полетом
Если сигналы  формируются в системе наведения (самонаведения) на основе информации от цели, то система управления обеспечивает наведение ЛА на цель (воздушную или наземную). При управлении строем летательных аппаратов сигналы
формируются в системе наведения (самонаведения) на основе информации от цели, то система управления обеспечивает наведение ЛА на цель (воздушную или наземную). При управлении строем летательных аппаратов сигналы  вырабатываются в системе измерения дистанции, интервала и превышения. Следует только указать, что при управлении строем в системе управления необходимо сформировать еще один канал — канал управления скоростью полета путем изменения тяги двигателей.
вырабатываются в системе измерения дистанции, интервала и превышения. Следует только указать, что при управлении строем в системе управления необходимо сформировать еще один канал — канал управления скоростью полета путем изменения тяги двигателей.
Из рассмотрения схемы следует, что система автоматического управления полетом ЛА является многоканальной (число каналов равно числу рулевых органов), причем все каналы, замыкаемые через звенья, отображающие динамику и кинематику ЛА, оказываются связанными между собой. Каждый канал управления, в свою очередь, является многоконтурным. На рис. 5 дана структурная схема системы управления полетом.
Основными элементами системы управления являются: датчики информации  соответственно о координатах рулевых органов, параметрах, характеризующих динамику ЛА, и параметрах, характеризующих его кинематику; блок формирования команд (БФК), включающий вычислительные, преобразовательные, усилительные и другие устройства; рулевые машины (РМ).
соответственно о координатах рулевых органов, параметрах, характеризующих динамику ЛА, и параметрах, характеризующих его кинематику; блок формирования команд (БФК), включающий вычислительные, преобразовательные, усилительные и другие устройства; рулевые машины (РМ).
Динамические свойства замкнутой системы, включающей САУ и ЛА, определяются динамическими свойствами составляющих ее элементов и способами их соединения.
Лекция 4.
План
1. Системы координат, применяемые для определения положения ЛА.
2. Углы, применяемые для определения положения ЛА.
1.7. Системы координат, применяемые для определения положения ЛА.
Летательный аппарат будем рассматривать как материальную точку - в задачах навигации или как твердое тело, систему твердых тел, упругое тело — в задачах управления полетом.
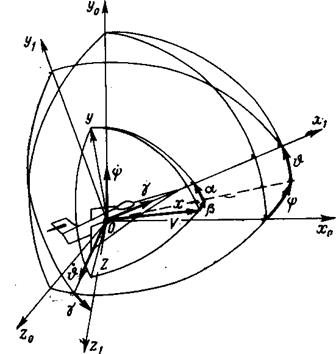
Рис. 6. Система координат
Движение ЛА как твердого тела можно рассматривать как сложное — движение центра масс и движение вокруг центра масс. Для характеристики движения в любой момент времени необходимо иметь шесть координат как функций времени: три координаты движения центра масс и три угловые координаты. При больших скоростях полета в пределах атмосферы на ЛА воздействуют значительные аэродинамические силы и моменты, что приводит к упругим деформациям аппарата и изменению его аэродинамических характеристик. В этом случае на движение ЛА как твердого тела накладываются упругие деформации. В ряде случаев размещенные внутри ЛА тела совершают движения, поэтому аппарат приходится рассматривать как систему твердых тел.
Для определения положения ЛА будем применять следующие системы прямоугольных координат (рис. 6):
— неподвижную систему  , начало которой совпадает с центром масс ЛА, ось
, начало которой совпадает с центром масс ЛА, ось  направлена по вертикали, а оси
направлена по вертикали, а оси  и
и  горизонтальны и имеют фикси-рованное направление по отношению к земле;
горизонтальны и имеют фикси-рованное направление по отношению к земле;
— связанную систему  с началом в центре масс ЛА, оси которой направлены по главным осям инерции аппарата: ось
с началом в центре масс ЛА, оси которой направлены по главным осям инерции аппарата: ось  — по продольной оси, ось
— по продольной оси, ось  — в плос-кости симметрии, ось
— в плос-кости симметрии, ось  перпендикулярна к плоскости симметрии;
перпендикулярна к плоскости симметрии;
— скоростную систему  с началом в центре масс ЛА, ось
с началом в центре масс ЛА, ось  которой направлена по вектору скорости V, ось
которой направлена по вектору скорости V, ось  —в плоскости симметрии, ось
—в плоскости симметрии, ось  перпендикулярна к плоскости симметрии.
перпендикулярна к плоскости симметрии.
1.8. Углы, применяемые для определения положения ЛА.
Положение связанной системы по отношению к неподвижной системе  характеризуется углами Эйлера
характеризуется углами Эйлера  . Угол
. Угол  образуемый при повороте ЛА вокруг продольной оси относительно положения, при котором поперечная ось
образуемый при повороте ЛА вокруг продольной оси относительно положения, при котором поперечная ось  горизонтальна, называется углом крена; угол
горизонтальна, называется углом крена; угол  , образуемый проекцией продольной оси на горизонтальную плоскость и заданным направлением
, образуемый проекцией продольной оси на горизонтальную плоскость и заданным направлением  , называется углом рыскания; угол
, называется углом рыскания; угол  , образуемый продольной осью ЛА с горизонтальной плоскостью, называется углом тангажа.
, образуемый продольной осью ЛА с горизонтальной плоскостью, называется углом тангажа.
Положение вектора воздушной скорости V относительно связанной системы характеризуется углом атаки  , т. е. углом между проекцией указанного вектора на плоскость симметрии и продольной осью, и углом скольжения
, т. е. углом между проекцией указанного вектора на плоскость симметрии и продольной осью, и углом скольжения  между вектором воздушной скорости и плоскостью симметрии. Общее движение ЛА можно разделить на продольное и боковое движения. Продольным называется движение, характеризуемое вращением вокруг поперечной оси и поступательным движением в направлении осей и
между вектором воздушной скорости и плоскостью симметрии. Общее движение ЛА можно разделить на продольное и боковое движения. Продольным называется движение, характеризуемое вращением вокруг поперечной оси и поступательным движением в направлении осей и  Боковое движение составляют вращения вокруг осей и и перемещение в направлении оси .
Боковое движение составляют вращения вокруг осей и и перемещение в направлении оси .
Поскольку движение ЛА непрерывно возмущается действующими на него силами и моментами, то для управления движением необходимо воздействовать на эти силы и моменты, изменяя их по требуемым законам. В качестве управляемых параметров выбирают угловые координаты и координаты центра масс, скорости, ускорения и др. Регулирующими факторами обычно являются углы отклонения рулей высоты  и направления
и направления  , элеронов
, элеронов  , стабилизатора
, стабилизатора  , угол отклонения дросселя двигателя
, угол отклонения дросселя двигателя  и т.д.
и т.д.
Ниже выводятся линеаризованные уравнения движения ЛА и определяются динамические характеристики, позволяющие оценивать реакцию аппарата на возмущения, а также рассматриваются возмущения, действующие на ЛА при полете в атмосфере.
Лекция 5.
План
1. Уравнения продольного движения ЛА.
2. Линеаризация уравнений продольного движения ЛА.
Состав систем автоматического управления летательными аппаратами. Требования, предъявляемые к ним.
Система автоматического управления полетом ЛА (рис. 1) состоит из датчиков, предназначенных для получения информации о режимах и условиях полета; вычислителей и корректирующих устройств, служащих для переработки информации и формирования законов управления; усилительных устройств и исполнительных механизмов (рулевых машин), служащих для усиления сигналов и передачи на органы управления; устройств для формирования программы управления; устройств для контроля работы системы и т. д.
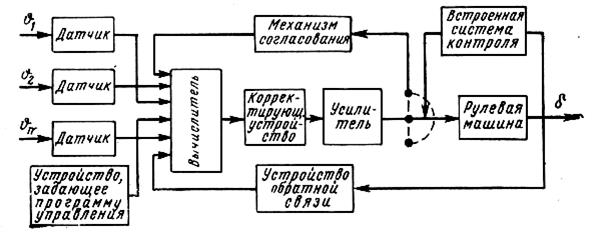
Рис. 1. Функциональная схема САУ
Структурные особенности САУ оцениваются ее законом управления, под которым подразумевают требуемую зависимость выходных сигналов исполнительных механиз-мов от совокупности входных сигналов. В реальных системах эта зависимость отлича-ется от закона управления вследствие того, что элементы системы обладают динами-ческими погрешностями и имеют статические характеристики, отличные от расчетных.
Системы автоматического управления обеспечивают стабилизацию и управление угловыми движениями и движениями центра масс, а также управление некоторыми параметрами режима полета. Системы автоматического управления полетом должны:
1) —улучшать устойчивость и управляемость ЛА на всех режимах полета как при ручном, так и автоматическом управлении. Для этой цели система должна включать автоматы устойчивости (если такие необходимы) и демпферные устройства;
2) —обеспечивать управление угловыми движениями ЛА, движением центра масс, наведение на цели. Для этого САУ должна быть связана с навигационной системой, прицелом, системой наведения и др.;
3) —быть пригодной для включения в работу в любом положении ЛА и выводить ЛА в горизонтальный полет при допустимых перегрузках;
4) —иметь связь с системой управления при посадке и взлете;
5) —для стабилизации скорости при сверхзвуковых полетах и на посадочных режимах включать канал управления скоростью с подачей сигналов на руль высоты и в некоторых случаях на тягу двигателей;
6) —предусматривать устройства для ограничения предельных режимов по перегрузкам, углам крена, угловым скоростям;
7) —предусматривать коррекцию передаточных чисел по режимам полета, а при широком диапазоне изменения параметров ЛА система управления должна быть самонастраивающейся;
8) —иметь связь с системой управления строем самолетов;
9) —обеспечивать выбор и поддержание оптимальных режимов полета (минимальное время полета, максимальная дальность, оптимальная траектория, автоматическое маневрирование для
увеличения живучести и т. д.);
10) —работать в принятых для Л А окружающих внешних условиях (температуры, перегрузки, давления, влажности и др.);
11) —быть комплексной с широким использованием принципов оптимальной информационной и структурной избыточности для повышения надежности при достаточной схемной и конструктивной простоте.
Система автоматического управления должна обладать достаточной поэлементной и схемной надежностью. Отказы САУ могут привести к односторонней перекладке рулей, что приводит к выходу самолета на опасные режимы. Для индикации отказов САУ применяются устройства встроенного контроля, которые должны обеспечивать безопасность автоматически управляемого полета.
САУ угловой скоростью.
Контуры управления угловыми скоростями ЛА, служат для формирования демпфирующих моментов и, следовательно, для улучшения качества переходного процесса.
Рассмотрим систему управления угловой скоростью тангажа, представленную структурной схемой на рисунке 3.
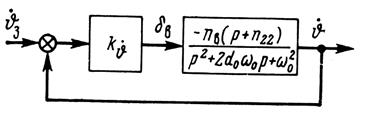
Рис. 3. Структурная схема системы управления угловой скоростью тангажа.
В этой схеме закон управления принят в виде
 (48)
(48)
где  — передаточное число;
— передаточное число;  — заданная угловая скорость тангажа, а передаточная функция ЛА по угловой скорости представлена в прямоугольнике.
— заданная угловая скорость тангажа, а передаточная функция ЛА по угловой скорости представлена в прямоугольнике.
Передаточная функция системы, как следует из рис.3 имеет вид:
 (49)
(49)
Здесь
 (50)
(50)
где  и
и  — соответственно собственная частота и коэффициент затухания ЛА.
— соответственно собственная частота и коэффициент затухания ЛА.
Для выбора передаточного числа  заметим, что наилучшее качество процесса в колебательном звене получается при
заметим, что наилучшее качество процесса в колебательном звене получается при  . Исключая из уравнений (50) частоту
. Исключая из уравнений (50) частоту  , получим выражение для :
, получим выражение для :
 (51)
(51)
Аналогичные рассуждения имеют место при рассмотрении систем управления угловой скоростью рысканья и крена.
САУ нормальной перегрузкой.
В ряде случаев системы управления полетом ЛА включают контуры управления перегрузками или, точнее говоря, ускорениями центра масс. Такие контуры управления являются внешними по отношению к контурам управления угловыми скоростями.
Поскольку, нормальная и боковая перегрузки пропорциональны соответственно углам атаки и скольжения, то контуры управления перегрузкой эквивалентны контурам управления углами  и
и  .
.
Рассмотрим нормальные и боковые ускорения, которые определяются скоростью изменения углов наклона траектории в вертикальной и горизонтальной плоскостях:
 (52)
(52)
где 
Если воспользоваться первыми из уравнений (19) и (27), то получим (при условии  и
и  ):
):
 (53)
(53)
Передаточные функции самолета по ускорениям jy и  при входах
при входах  и
и  можно получить из передаточных функций (20) и (28) и соотношений (53):
можно получить из передаточных функций (20) и (28) и соотношений (53):
 (54)
(54)
 (55)
(55)
Рассмотрим систему стабилизации нормального ускорения (рис. 4).
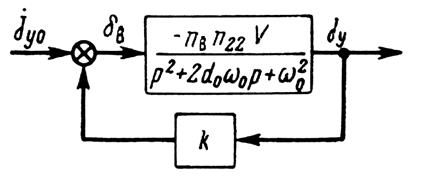
Рис.4. Система управления нормальным ускорением.
Для измерения ускорений  и можно применить акселерометры, оси чувствитель-ности которых совпадают соответственно с нормальной
и можно применить акселерометры, оси чувствитель-ности которых совпадают соответственно с нормальной  и поперечной
и поперечной  осями самолета.
осями самолета.
Запишем закон управления в соответствии со схемой рис. 4
 (56)
(56)
Уравнение движения системы будет
 (57)
(57)
Отсюда видно, что при принятом законе управления (56) обеспечивается повышение запаса статической устойчивости ЛА. Такой же эффект будет при введении в закон управления угла атаки а вместо нормального ускорения jy . Демпфирование же ЛА будет неудовлетворительным. Для получения приемлемого переходного процесса контур управления ускорением необходимо применять совместно с контуром управления угловой скоростью. Сказанное здесь об управлении нормальным ускорением целиком относится к управлению боковым ускорением.
Лекция 12.
План
1. САУ углом тангажа посредством статического автопилота.
2. САУ углом тангажа посредством астатического автопилота.
3. САУ углом тангажа посредством изодромного автопилота.
САУ углом курса.
Рассмотрим поведение самолета по углу рыскания, управляемого автопилотом (рис. 8). Простейшим движением рыскания является колебание продольной оси самолета в горизонтальной плоскости по отношению к вектору скорости, описываемое уравнением:
 (65)
(65)
Уравнение статического автопилота возьмем в виде
 (66)
(66)
где  и
и  — передаточные числа;
— передаточные числа;  — заданный курсовой угол.
— заданный курсовой угол.
Из уравнений (65) и (66) находим
 (67)
(67)
где 
Системе (67) свойственна статическая ошибка, величина которой определится из условия  :
:
 (68)
(68)
Видно, что для уменьшения статической ошибки необходимо увеличивать передаточное число по позиционному сигналу.
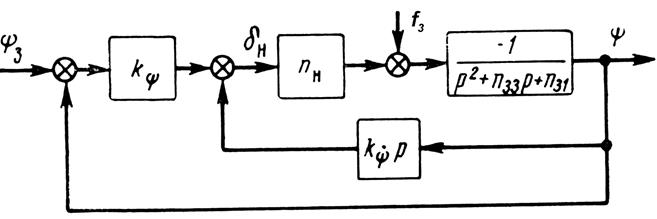
Рис.8. Структурная схема канала рысканья
Предполагая момент  постоянным, найдем его величину для самолета с двумя двигателями, расположенными на расстоянии 5 м от продольной оси. Пусть тяга двигателя 8000 кгс, а неточность регулирования тяги составляет 10%. Возмущающий относительный момент будет (момент инерции
постоянным, найдем его величину для самолета с двумя двигателями, расположенными на расстоянии 5 м от продольной оси. Пусть тяга двигателя 8000 кгс, а неточность регулирования тяги составляет 10%. Возмущающий относительный момент будет (момент инерции  ):
):
Статическая ошибка при  =0,545 (см. ниже)
=0,545 (см. ниже)
В некоторых случаях такая ошибка недопустима, поэтому вместо статического применяют астатический автопилот.
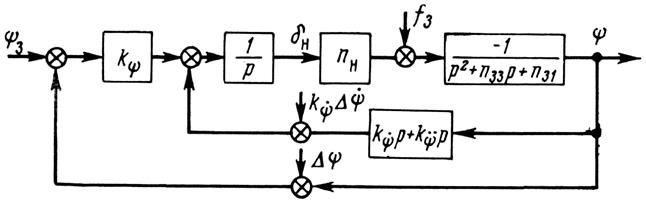
Рис. 9. Структурная схема канала рыскания астатического автопилота
Поведение самолета с астатическим автопилотом (рис. 9), закон которого возьмем в виде
 (69)
(69)
описывается уравнением
 (70)
(70)
Здесь

где  и
и  — погрешности измерения курса и угловой скорости рыскания.
— погрешности измерения курса и угловой скорости рыскания.
Из уравнения (70) видно, что поскольку возмущающий момент  стоит под знаком дифференцирования, то статическая погрешность от этого момента будет отсутствовать. Вместе с тем видно, что погрешности в измерении курса и угловой скорости рыскания являются возмущающими факторами и целиком переходят в соответствующую погрешность стабилизации курса. Таким образом, автопилот не может стабилизировать курсовой угол (угол тангажа или крена) с большей точностью, чем точность измерения этого угла и его производных.
стоит под знаком дифференцирования, то статическая погрешность от этого момента будет отсутствовать. Вместе с тем видно, что погрешности в измерении курса и угловой скорости рыскания являются возмущающими факторами и целиком переходят в соответствующую погрешность стабилизации курса. Таким образом, автопилот не может стабилизировать курсовой угол (угол тангажа или крена) с большей точностью, чем точность измерения этого угла и его производных.
Лекция 14.
План
1. САУ углом крена.
2. Принципы построения самонастраивающихся автопилотов.
САУ углом крена.
Для управления углом крена используется специальный канал автопилота, называемый каналом крена. Законы управления канала крена обычно имеют ту же структуру, что и законы управления каналов тангажа и рыскания. Для выбора передаточных чисел канала крена необходимо исследовать динамику переходного процесса в системе, включающей самолет и канал крена.
Уравнение движения самолета по углу крена возьмем в виде
 (71)
(71)
Это уравнение отличается от уравнения (32) членом  которым мы пренебрегаем ввиду его малости.
которым мы пренебрегаем ввиду его малости.
Рассмотрим поведение самолета с автоматом крена при двух законах управления:
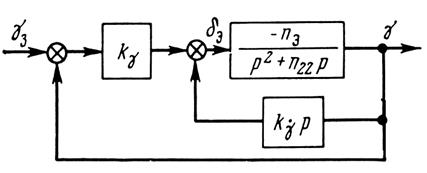
Рис. 10. Структурная схема канала крена статического автопилота
статическим (рис. 10):
 (72)
(72)
астатическим (рис. 11):
 (73)
(73)
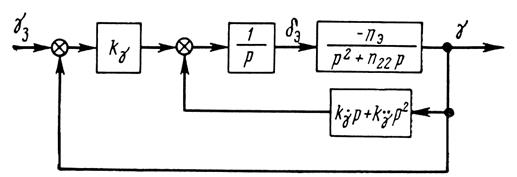
Рис. 11. Структурная схема канала крена астатического автопилота
Решая уравнения (72) и (73) совместно с уравнением (71), получим:
для статической системы
 (74)
(74)
где 
для астатической
 (75)
(75)
где 
Лекция 18.
План
1. Задачи, возникающие при автоматическом наведении.
2. Классификация систем автоматического наведения ЛА на цели.
Метод погони.
Если угол упреждения равен нулю:
 (103)
(103)
т. е. вектор скорости ЛА Vc все время направлен на цель, то получаем метод наведения, называемый методом погони. Для этого метода из уравнений (101) получаем:
 (104)
(104)
Если  , то интегрирование уравнения (104) при начальных условиях
, то интегрирование уравнения (104) при начальных условиях  позволяет получить кинематические траектории соответственно для удаляющейся и приближающейся цели:
позволяет получить кинематические траектории соответственно для удаляющейся и приближающейся цели:
 (105)
(105)
Время полета ЛА к цели может быть найдено, например, путем интегрирования второго уравнения (102), из которого получаем
Воспользовавшись выражением (105), найдем время для удаляющейся и приближающейся цели:
 (106)
(106)
Для получения времени встречи ЛА с целью следует положить  , тогда
, тогда
 (107)
(107)
Из этих выражений видно, что удаляющуюся цель можно перехватить только при  , т. е. когда скорость ЛА больше скорости цели. Для приближающейся цели перехват возможен как при , так и при
, т. е. когда скорость ЛА больше скорости цели. Для приближающейся цели перехват возможен как при , так и при  .
.
На рис. 22 построены траектории полета (кривые погони) цели и ЛА для удаляющейся цели (рис. 22, а) и для приближающейся цели (рис. 22,6). При построении предполагалось, что время встречи tc разделено на равные промежутки  и в течение каждого промежутка скорости цели и ЛА постоянны.
и в течение каждого промежутка скорости цели и ЛА постоянны.
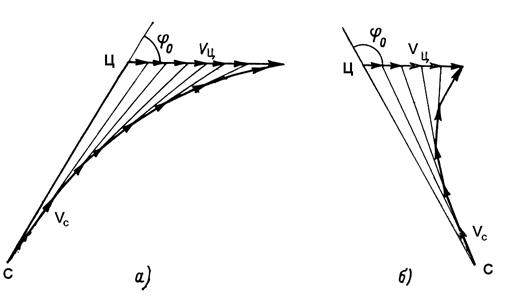
Рис. 22. Траектории полета при наведении по методу погони
Угловая скорость линии визирования в методе погони может быть найдена из второго уравнения (102) и уравнения (105):
 (108)
(108)
Легко видеть, что встреча с приближающейся целью будет при  , а с удаляющейся целью — при
, а с удаляющейся целью — при  .
.
Нормальное ускорение ЛА в методе погони будет
 (109)
(109)
Очевидно, что при  нормальное ускорение в момент встречи конечно, а при
нормальное ускорение в момент встречи конечно, а при  — стремится к бесконечности.
— стремится к бесконечности.
5.4. Методы прямого наведения и преследования с упреждением.
В некоторых случаях реализуется метод наведения, при котором не вектор скорости, а продольная ось ЛА все время направлена на цель. Такой метод называется методом прямого на ведения. Поскольку направление продольной оси отличается от направления вектора скорости  на углы атаки
на углы атаки  и скольжения
и скольжения  , то характеристикой метода прямого наведения будет (в вертикальной плоскости)
, то характеристикой метода прямого наведения будет (в вертикальной плоскости)
 (110)
(110)
Метод наведения, при котором угол между вектором скорости ЛА и линией визирования «ЛА — цель» остается постоянным, называется методом преследования с упреждением. Характеристикой этого метода является
 (111)
(111)
Из уравнений (102) при условии (111) получаем уравнение с разделяющимися переменными
 (112)
(112)
Интегрирование этого уравнения при  , что имеет место в действительности, дает (113):
, что имеет место в действительности, дает (113):
 (113)
(113)
где 
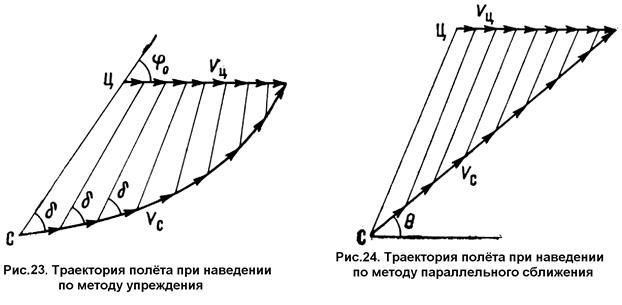
Представление о траекториях полета ЛА и цели дает графическое построение при  = const и
= const и  =2, приведенное на рис. 23.
=2, приведенное на рис. 23.
Время полета ЛА может быть получено интегрированием первого уравнения системы (102) с учетом выражения (113):
 (114)
(114)
Для определения угловой скорости линий визирования в этом методе необходимо взять второе уравнение системы (102), подставив в него значение  из выражения (113). Находим:
из выражения (113). Находим:
 (115)
(115)
где F(  ) — имеет конечное значение.
) — имеет конечное значение.
Из выражения (115) видно, что угловая скорость  может быть бесконечно большой только при
может быть бесконечно большой только при  . Нормальное ускорение в методе преследования с упреждением находится по формуле (109), в которую необходимо подставить из выражения (115)
. Нормальное ускорение в методе преследования с упреждением находится по формуле (109), в которую необходимо подставить из выражения (115)
Лекция 21.
План
1. Метод параллельного сближения.
2. Метод пропорционального сближения.
3. Метод накрытия цели.
5.5. Метод параллельного сближения.
Метод наведения, при котором линия визирования «ЛА — цель» перемещается параллельно самой себе, называется мето дом параллельного сближения. Если цель движется прямолинейно, то, как видно из построения на рис. 24, траектория ЛА также прямая линия.
Легко видеть, что при этом методе наведения  и
и  (см. рис. 21) или
(см. рис. 21) или
 (116)
(116)
Кинематические соотношения для метода параллельного сближения при условиях и получаются интегрированием уравнений (102):
 (117)
(117)
 (118)
(118)
Так как в рассматриваемом методе наведения угловая скорость линии визирования равна нулю, т. е. , то в соответствии с выражением (109) нормальное ускорение также равно нулю. Если цель движется по криволинейной траектории, то траектория ЛА также будет криволинейной, а ускорение  уже не будет равно нулю.
уже не будет равно нулю.
Для реализации метода параллельного сближения необходимо подавать в систему управления сигнал приращения угловой скорости линии визирования ЛА — цель. Этот сигнал возникает при отклонении вектора скорости V0 от направления в точку встречи на угол  , т. е.
, т. е.
или вследствие малости и использования уравнения (116)
 (119)
(119)
Метод накрытия цели.
Метод наведения, при котором (см. рис. 21)
 (123)
(123)
называется методом накрытия цели. В этом методе ЛА (точка С на рис. 25) находится на прямой, соединяющей цель (точка Ц) и пункт наведения (точка О). Этот метод реализуется путем организации движения по равносигнальной зоне луча.
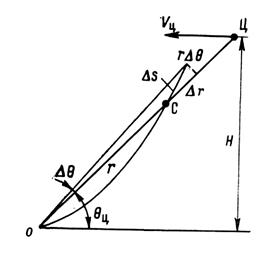
Рис.25
Пользуясь построением (см. рис. 25), можем написать

или переходя к пределу
 (124)
(124)
где r — наклонная дальность до ЛА;  Ц — угол места цели; s — длина траектории.
Ц — угол места цели; s — длина траектории.
Пройденное целью за время t расстояние
 (125)
(125)
где Н — высота цели; 0 — угол места цели в момент старта ЛА.
По решению уравнения (124) можно построить траектории полета ЛА (см. рис. 26).
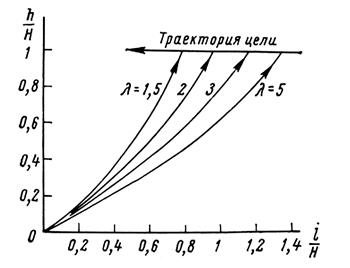
Рис.26
Здесь по оси абсцисс отложена относительная дальность  , а по оси ординат — относительная высота h / H полета ЛА, где Н — высота полета цели. Время полета ЛА до момента встречи найдем из уравнения (125):
, а по оси ординат — относительная высота h / H полета ЛА, где Н — высота полета цели. Время полета ЛА до момента встречи найдем из уравнения (125):
 (126)
(126)
где  — угол места цели в момент встречи.
— угол места цели в момент встречи.
Лекция 22.
План
1. Принципы построения систем самонаведения. Классификация.
2. Понятие о координаторах цели.
КОНСПЕКТ ЛЕКЦИЙ
по дисциплине
Системы управления летательными аппаратами
Направление подготовки: 160400 «Системы управления движением и навигация»
Специальность: 160403 «Системы управления летательными аппаратами»
Формы обучения очная
Тула 2009 г.
Рассмотрено на заседании кафедры
протокол №_1_ от "28" августа 2009 г.
Зав. кафедрой________________О.В. Горячев
СОДЕРЖАНИЕ
1..... Математические модели и динамические характеристики летательных аппаратов. 6
Лекция 1. 6
1.1. Краткая характеристика летательных аппаратов. 6
1.2. Рулевые органы летательных аппаратов. 7
Лекция 2. 10
1.3. Цели и задачи управления полетом ЛА. 10
1.4. Информация, необходимая для функционирования систем управления. 13
Лекция 3. 15
1.5. Классификация автоматических устройств летательных аппаратов. 15
1.6. Понятие об автопилоте. 16
Лекция 4. 19
1.7. Системы координат, применяемые для определения положения ЛА. 19
1.8. Углы, применяемые для определения положения ЛА. 21
Лекция 5. 22
1.9. Уравнения продольного движения ЛА. 22
1.10. Линеаризация уравнений продольного движения ЛА. 24
Лекция 6. 27
1.11. Частные случаи продольного движения ЛА. 29
Лекция 7. 31
1.12.Передаточные функции и частотные характеристики продольного движения ЛА. 31
1.13. Уравнения бокового движения ЛА. Частные случаи бокового движения. Передаточные функции. 33
Лекция 8. 35
1.14. Особенности динамических характеристик летательных аппаратов с двумя плоскостями симметрии. 35
1.15. Динамические свойства летательных аппаратов при учете нежесткости конструкции. 38
2. Принцип действия, схемы и характеристики систем управления летательными аппаратами. 39
Лекция 9. 39
2.1. Состав систем автоматического управления летательными аппаратами. Требования, предъявляемые к ним. 39
2.2. Законы управления автопилотов. 41
Лекция 10. 43
2.3. Принцип действия автопилотов. 44
3..... Динамика автоматического управления угловыми движениями летательного аппарата. Устойчивость, статические и динамические ошибки процессов управления. 46
Лекция 11. 46
3.1. САУ угловой скоростью. 47
3.2. САУ нормальной перегрузкой. 48
Лекция 12. 50
3.3. САУ углом тангажа посредством статического автопилота. 50
3.4. САУ углом тангажа посредством астатического автопилота. 51
3.5. САУ углом тангажа посредством изодромного автопилота. 52
Лекция 13. 53
3.6. САУ углом курса. 53
Лекция 14. 56
3.7. САУ углом крена. 56
3.8. Принципы построения самонастраивающихся автопилотов. 57
4..... Динамика автоматического управления движением центра масс летательного аппарата. Управление траекторией полета ЛА на маршруте, при заходе на посадку. 60
Лекция 15. 60
4.1. Управление и стабилизация высоты полета. 61
Лекция 16. 65
4.2. Управление высотой полета низколетящих самолетов. 65
4.3. Управление боковым движением центра масс самолета. 67
Лекция 17. 68
4.4. Управление и стабилизация скорости полета. 68
5..... Автоматическое наведение летательных аппаратов на цели. 72
Лекция 18. 72
5.1. Классификация систем автоматического наведения ЛА на цели. Задачи, возникающие при автоматическом наведении, пути их решения. 72
Лекция 19. 74
5.2. Методы наведения. Основные кинематические уравнения методов наведения. 74
Лекция 20. 77
5.3. Метод погони. 77
5.4. Методы прямого наведения и преследования с упреждением. 79
Лекция 21. 81
5.5. Метод параллельного сближения. 81
5.6. Метод пропорционального сближения. 82
5.7. Метод накрытия цели. 83
Лекция 22. 85
5.8. Принципы построения систем самонаведения. 85
Лекция 23. 88
5.9. Принципы построения систем телеуправления. 89
Лекция 24. 90
5.10. Система наведения с радиовизированием цели. 90
Лекция 25. 94
5.11. Понятие о беспилотном летательном аппарате. 94
5.12. Структура и классификация БЛА. 95
Математические модели и динамические характеристики летательных аппаратов.
Лекция 1.
План
1. Краткая характеристика летательных аппаратов.
2. Рулевые органы летательных аппаратов.
Рассмотрим краткие сведения об особенностях управления летательными аппаратами (ЛА) и общих требованиях к управляемому полету, об информационных характеристиках процессов управления и аппаратуре для получения информации, а также проведем классификацию средств автоматического управления.
Дата: 2019-02-02, просмотров: 882.