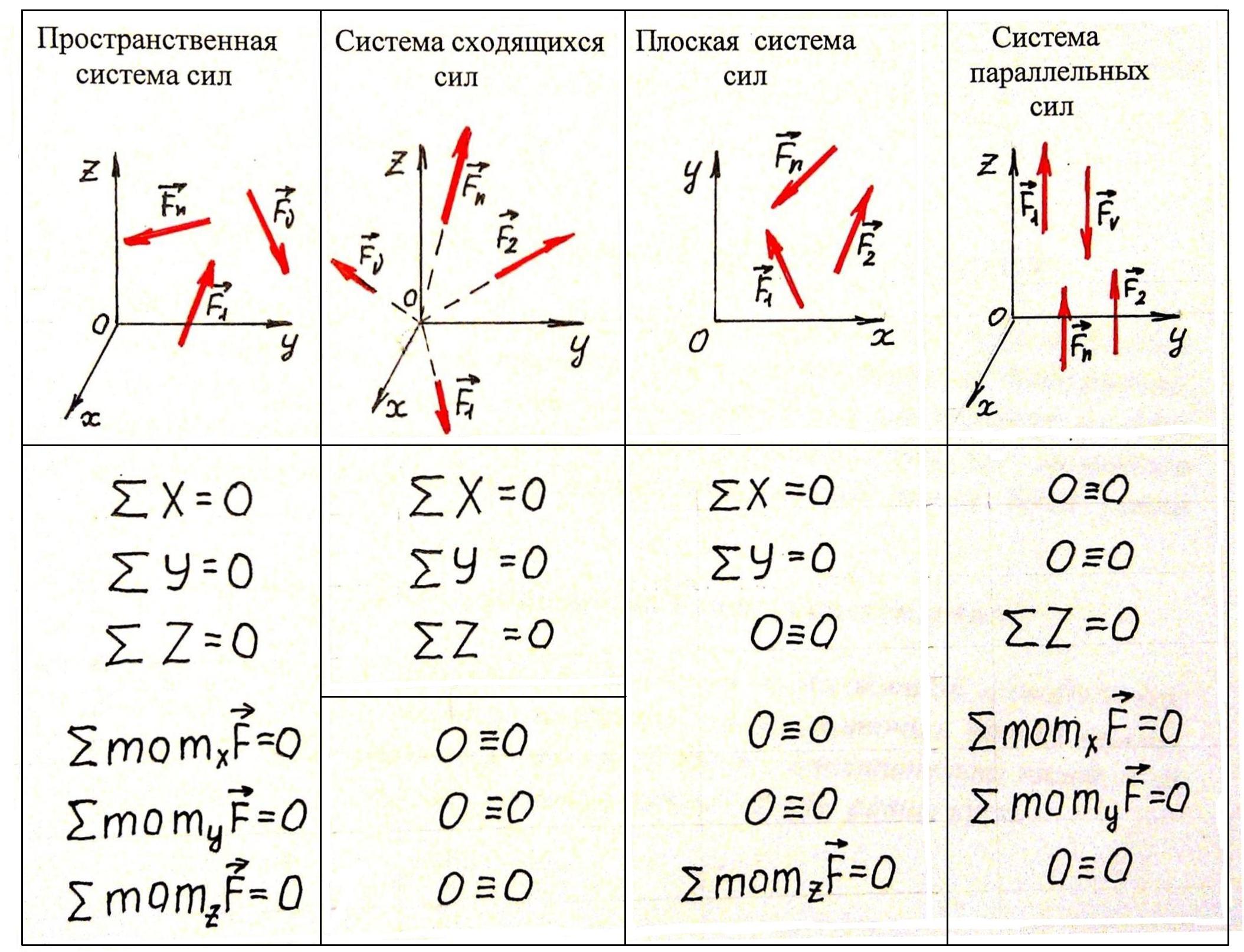
Из общих условий равновесия для произвольной пространственной системы сил получаются условия равновесия для частных систем сил, приложенных к твердому телу.
Из общих условий равновесия тел произвольной пространственной системы сил получается условие равновесия частных систем сил, приложенных к твёрдому телу.
6.1. Условия равновесия плоской системы сил
Плоской называется такая система сил, линии действия которой расположены в одной плоскости.
· Векторная форма условий равновесия
Для равновесия (произвольной) плоской системы сил, приложенной к свободному абсолютно твердому телу, необходимо и достаточно, чтобы главный вектор и главный момент системы сил, вычисленные относительно произвольно выбранной точки были равны нулю.
R = 0, M 0 = 0.
· Координатная (аналитическая) форма условий равновесия
Для равновесия (произвольной) плоской системы сил, приложенной к свободному абсолютно твердому телу, необходимо и достаточно, чтобы суммы проекций всех сил системы сил на каждую из двух координатных осей были равны нулю и сумма скалярных моментов всех сил, вычисленная относительно произвольной точки была равна нулю.
∑ X = 0; ∑ Y = 0; ∑ mom 0 F = 0.
Другие формы условий равновесия плоской системы сил
1.  Для равновесия плоской системы сил, приложенной к свободному абсолютно твердому телу, необходимо и достаточно, чтобы суммы скалярных моментов всех сил, вычисленных относительно каждой из трех точек, не лежащих на одной прямой, были равны нулю.
Для равновесия плоской системы сил, приложенной к свободному абсолютно твердому телу, необходимо и достаточно, чтобы суммы скалярных моментов всех сил, вычисленных относительно каждой из трех точек, не лежащих на одной прямой, были равны нулю.
∑ mom A F = 0;
∑ mom B F = 0;
∑ mom C F = 0. Рис. 40
2. . Для равновесия плоской системы сил, приложенной к свободному абсолютно твердому телу, необходимо и достаточно, чтобы суммы скалярных моментов всех сил, вычисленных относительно каждой из двух произвольно выбранных точек, были равны нулю и сумма проекций всех сил на ось, не перпендикулярную отрезку, соединяющему эти две точки, была равна нулю.
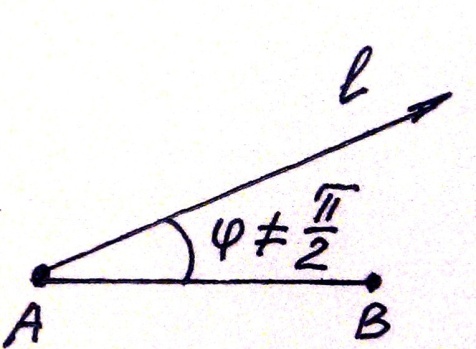 ∑ mom A F = 0;
∑ mom A F = 0;
∑ mom B F = 0; Рис .41
 ∑ Пр е AB F = 0.
∑ Пр е AB F = 0.
6.2. Условия равновесия системы параллельны сил
Если линии действия всех сил системы параллельны, то она называется системой параллельных сил.
· Векторная форма условий равновесия
Для равновесия системы параллельных сил, приложенных к свободному абсолютно твердому телу, необходимо и достаточно, чтобы главный вектор и главный момент системы сил, вычисленные относительно произвольно выбранной точки были равны нулю.
R = 0, M 0 = 0.
· Координатная (аналитическая) форма условий равновесия
Для равновесия пространственной системы параллельных сил, приложенных к свободному абсолютно твердому телу, необходимо и достаточно, чтобы сумма проекций всех сил системы сил на ось, параллельную силам, была равна нулю и суммы моментов всех сил, вычисленные относительно каждой из двух других координатных осей были равны нулю.
∑ Z = 0;
∑ mom x F = 0;
∑ mom y F = 0.
Для равновесия плоской системы параллельных сил, приложенных к свободному абсолютно твердому телу, необходимо и достаточно, чтобы сумма проекций всех сил системы сил на ось, параллельную силам, была равна нулю и сумма, скалярных моментов всех сил, вычисленных относительно произвольной точки была равна нулю.
∑ Z = 0;
∑ mom 0 F = 0.
6.3. Условие равновесия системы сходящихся сил
Системой сходящихся сил называется такая система сил, линии действия которых пересекаются в одной точке, называемой точкой схода.
· Векторная форма условий равновесия
Для равновесия системы сходящихся сил, приложенной к свободному абсолютно твердому телу, необходимо и достаточно, чтобы главный вектор системы сил был равен нулю.
R = 0.
· Координатная (аналитическая) форма условий равновесия
Для равновесия пространственной системы сходящихся сил, приложенной к свободному абсолютно твердому телу, необходимо и достаточно, чтобы суммы проекций всех сил системы на каждую из трех координатных осей были равны нулю.
∑ X = 0; ∑ Y = 0; ∑ Z = 0.
Для равновесия плоской системы сходящихся сил, приложенной к свободному абсолютно твердому телу, необходимо и достаточно, чтобы суммы проекций всех сил системы на каждую из двух координатных осей были равны нулю.
∑ X = 0; ∑ Y = 0 .
· Геометрическая форма условий равновесия
Для равновесия системы сходящихся сил, приложенной к свободному абсолютно твердому телу, необходимо и достаточно, чтобы силовой многоугольник был замкнут.
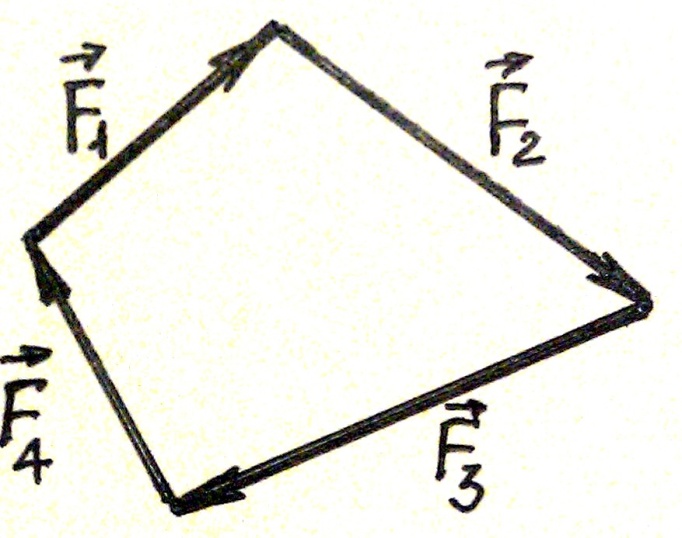
Рис.42
Дата: 2018-11-18, просмотров: 1398.