Управляемость машины это способность ее двигаться точно по задаваемой траектории при условии минимальных физических и психологических нагрузок на водителя. Понятие управляемости включает в себя свойства курсовой устойчивости (способность изменять направление движения по заданной траектории при соответствующем воздействии на орган управления).
Существуют следующие способы поворота колесных тракторов и автомобилей: поворот всех колес или только передних управляемых; излом шарнирно-сочлененной рамы машины; создание разности вращающих моментов на ведущих колесах; бортовой способ поворота по принципу гусеничных машин; комбинированный способ, сочетающий первый и третий способы поворота.
Автомобили и большинство тракторов поворачивают, изменяя направление движения передних колес, а тракторы Т-150К, К-701 - в результате поворота одной части рамы относительно другой вокруг соединяющего их вертикального шарнира.
Рулевое управление классифицируют по следующим признакам: по расположению на машине - с левым или правым расположением; по конструкции рулевого механизма - червячные, реечные, кривошипно-винтовые, комбинированные и др.; по конструктивным особенностям рулевого привода - привод к управляемым колесам и управляемым осям или к складывающимся полурамам.
Рулевое управление должно быть легким и удобным, для чего усилие на рулевом колесе и угол его поворота должны быть ограниченными. Кроме того, необходимо, чтобы рулевое управление обеспечивало правильную кинематику поворота и безопасность движения, а поворот колес происходил так, чтобы их качение не вызывало проскальзывания. Это обеспечивается соединением рулевого управления в форме трапеции.
К рулевому управлению предъявляют следующие требования.
1. Обеспечение высокой маневренности, при которой возможны кру
тые и быстрые повороты на сравнительно ограниченных площадях.
2. Легкость управления, оцениваемая усилием, прилагаемым к рулево
му колесу.
3. Высокая степень надежности действия, поскольку выход рулевого
управления из строя в большинстве случаев заканчивается аварией или ката
строфой.
4. Правильная кинематика поворота, при которой колеса всех осей ав
томобиля катятся по концентрическим окружностям (невыполнение этого
требования приводит к скольжению шин по дороге, интенсивному их изнашиванию, излишним расходам мощности двигателя и топлива).
5. Умеренное ощущение толчков на рулевом колесе при езде по пло
хим дорогам, что снижает безопасность движения.
6. Точность следящего действия, в первую очередь кинематического,
при котором любому заданному положению рулевого колеса будет соответ
ствовать вполне определенная заранее рассчитанная крутизна поворота.
7. Отсутствие в рулевом управлении больших зазоров, приводящих к
плохому держанию автомобилем дороги, к его вилянию.
Рулевое управление машины с передними управляемыми колесами состоит из переднего моста, трапеции управления, рулевого привода и рулевого механизма (рисунок 9.1, а). Передние колеса устанавливают на цапфах 13, соединенных с передней осью шкворнями. Все это образует передний мост.
От насоса ( к \\
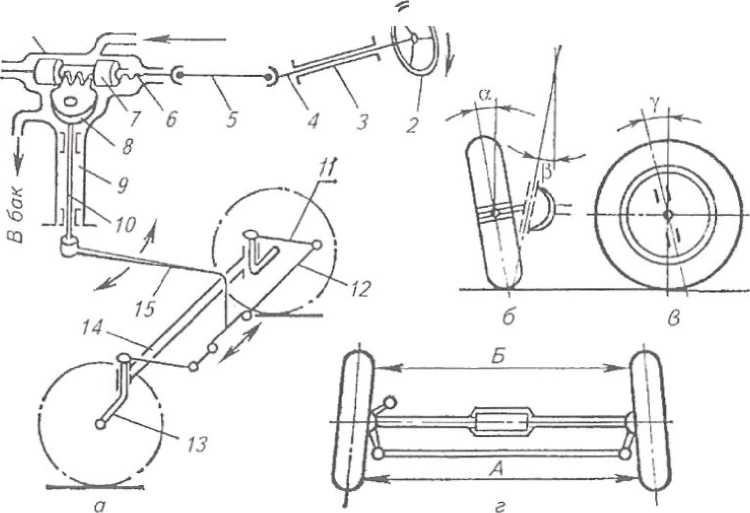
Рисунок 9.1 Схемы рулевого управления и установки передних колес: а - схема рулевого управления: 1 - гидроусилитель; 2 - рулевое колесо; 3 - рулевая колонка; 4 - вал рулевого механизма; 5 - карданная передача; 6 - винт гидроусилителя; 7 -поршень-рейка; 8 - зубчатый сектор; 9 - стойки; 10- вал сошки; 11 - поворотный рычаг; 12 - поперечная тяга; 13 - поворотная цапфа; 14 - передняя ось; 15 - рулевая сошка; б - развал колес и поперечный наклон шкворня; в - продольный наклон шкворня; г - схождение колес
На цапфах закреплены рычаги 11, связанные шарнирно с поперечными тягами 12, Рычаги 11 и поперечные тяги 12 с передней осью 14 составляют трапецию управления, предназначенную для поворота колес.
Тяги 22 соединены с рулевой сошкой 15, сидящей на валу 10 с закрепленным на нем зубчатым сектором 8. Рулевая сошка и вал 10 образуют рулевой привод, передающий усилие от сошки к поворотным цапфам.
Зубчатый сектор 8 находится в зацеплении с поршнем-рейкой 7, укрепленной на винте 6 гидроусилителя, и образует рулевой механизм. Действие рулевого механизма облегчается гидравлическим усилителем. Усилие к рулевому механизму передается от рулевого колеса 2, сидящего на валу 4, через карданную передачу 5 на винт 6.
В рулевых механизмах применяют передачи типа червяк ролик, червяк - сектор, червяк - червячная шестерня и др. Передачи первого типа наиболее распространены в рулевых механизмах тракторов и грузовых автомобилей.
На отечественных автомобилях принято левое (по ходу) рулевое управление, обеспечивающее лучший обзор. У тракторов рулевое управление расположено справа, благодаря чему создаются условия для лучшего наблюдения за работой агрегата и более точного его вождения при выполнении ряда технологических операций (пахота, косьба и т. д.).
С целью облегчения управления трактором или автомобилем применяют усилители рулевого управления преимущественно гидравлического типа (в тракторах К-701, Т-150К, МТЗ-80, ЛТЗ-55, в автомобиле ЗИЛ-130).
Управляемые (направляющие) колеса трактора (автомобиля) должны быть установлены правильно, чтобы износы шин и затраты мощности на качение были наименьшими, устойчивость - хорошей, а управление - легким. Установка управляемых (передних) колес характеризуется их развалом в вертикальной плоскости и схождением в горизонтальной, а также наклоном шкворней поворотных цапф в продольной и поперечной плоскостях.
Развал колес (рисунок 9.1, б) определяется установкой цапф колес с наклоном их шипов вниз. Это позволяет уменьшить нагрузки на внешний подшипник и улучшить управляемость. Угол развала колес различных машин α ≤ 2°.
Схождение колес (рисунок 9.1, г) находят по разнице размеров А и Б между серединами колес впереди и сзади, если смотреть на них сверху. Схождение колес обеспечивает правильное параллельное качение их при наличии развала и зазоров в шкворнях, рулевых тягах и подшипниках колес. В руководстве по каждой машине указывают требуемые размеры А и Б, которые проверяют специальными приспособлениями и регулируют, изменяя длину поперечной тяги рулевого управления. Схождение колес находится в пределах 2... 12 мм.
Поперечный β (см. рисунок 9.1, б) и продольный γ (рисунок 9.1, в) наклоны шкворня способствуют повышению устойчивости колеса в среднем положении. Угол γ, характеризующий поперечный наклон шкворня, составляет у автомобилей 6...8° и определяется соответствующей формой передней оси. Угол у, характеризующий продольный наклон шкворня, изменяется в пределах 0...40 и определяется установкой цапфы передней оси в наклонном положении. Углы наклона шкворней в процессе эксплуатации машин регулировкам не подлежат.
Дата: 2018-12-21, просмотров: 579.