поврежденной цепи линии электропередачи
Из рис. 4.7 можно найти предельное значение угла отключения КЗ, при котором устойчивая работа системы сохраняется. Оно определяется равенством площади ускорения abcd и возможной площади торможения defh. Приравнивая к нулю сумму этих площадей, получаем аналитическое выражение для предельного угла отключения КЗ [6]:
Fabcd = Fdefh =  . (4.6)
. (4.6)
Раскрывая определенные интегралы, получим
cos (dоткл. пр) =  , (4.7)
, (4.7)
где dкр = p – arcsin  .
.
Углы выражены в радианах.
Для практических целей важнее знать не угол dоткл.пр, а время, за которое он будет достигнут. Для схемы рис. 4.6, а рассмотрим трехфазное КЗ в начале линии, для которого РmII = 0 (рис. 4.8).
Рис. 4.8. Моментно-угловая характеристика для трехфазного КЗ в начале ЛЭП
Дифференциальное уравнение движения ротора для трехфазного КЗ имеет вид
 (4.8)
(4.8)
Перепишем это уравнение в виде
 (4.9)
(4.9)
Взяв интеграл от левой и правой частей, получим
 (4.10)
(4.10)
При t = 0 относительная скорость ротора w = 0 и, следовательно, с1 = 0.
Проинтегрировав еще раз последнее выражение, получим
 (4.11)
(4.11)
Постоянная интегрирования с2 определяется из условий d = d0, с2 = d0 при t = 0. Окончательно зависимость угла от времени будет иметь вид
 (4.12)
(4.12)
Возрастание угла происходит по квадратичной параболе, а время, отвечающее какому-либо значению угла d, найдется из последнего выражения как
 . (4.13)
. (4.13)
Предельный угол отключения трехфазного КЗ может быть определен из выражения (2.2), записанного для случая РmII = 0,
cos (dоткл. пр) =  . (4.14)
. (4.14)
Предельное время отключения трехфазного КЗ К(3) определится из формулы (4.15):
 . (4.15)
. (4.15)
 Рис. 4.9. Зависимость d(t), разбитая на интервалы времени Dt
Рис. 4.9. Зависимость d(t), разбитая на интервалы времени Dt
|
 . (4.16)
. (4.16)
Такое уравнение решается методами численного интегрирования, одним из которых является метод последовательных интервалов. В соответствии с этим методом весь процесс движения ротора разбивается на ряд интервалов времени Dt и для каждого интервала последовательно вычисляется приращение угла Dd
(рис. 4.9) [1, 2, 7].
В нормальном установившемся режиме имеет место равенство
РТ = Рmsin(d) и угол d остается неизмененным. В момент КЗ отдаваемая генератором мощность Рmsin(d) падает, и на валу «турбина – генератор» возникает некоторый избыток мощности DР(0), и ротор машины получает ускорение
 . (4.17)
. (4.17)
Здесь принято, что при небольших изменениях скорости приращения момента и мощности в относительных единицах равны между собой.
Для малого интервала времени Dt можно допустить, что избыток мощности DР(0) в течение этого интервала остается неизмененным.
Интегрируя выражение (4.16), получим в конце первого интервала
 d(1) = a(0)
d(1) = a(0)  + с2, (4.18)
+ с2, (4.18)
где DV – приращение относительной скорости ротора.
Относительная скорость ротора в начальный момент КЗ равна нулю
(с1 = 0). Относительная скорость ротора в конце первого интервала равна DV(1). При t = 0 угол d = d0, поэтому с2 = d0.
Приращение угла на первом интервале с учетом (4.18) составит
Dd(1) = a(0)  =
=  . (4.19)
. (4.19)
Здесь угол и время представлены в радианах. В практических расчетах угол выражают в градусах, а время – в секундах:
d(град) =  d(рад), t(c) =
d(рад), t(c) =  , (4.20)
, (4.20)
где w0 – синхронная скорость.
Используя последние выражения и учитывая, что Тj(c) =  , получим
, получим
d(1) = d0 +  d0 + K
d0 + K  , (4.21)
, (4.21)
где К =  .
.
Ускорение, создаваемое во втором интервале, пропорционально избыт-ку мощности в конце первого интервала DР(1). При вычислении приращения угла в течение второго интервала необходимо учесть то, что, кроме действующего в этом интервале ускорения a(1), ротор уже имеет в начале второго интервала скорость V(1):
Dd(2) = V(1)Dt +  = V(1)Dt + К
= V(1)Dt + К  , (4.22)
, (4.22)
где DР(1) = Р0 – Рm sind(1).
Значение скорости V(1) неточное, так как ускорение a(0) не является постоянным в течение первого интервала времени.
По аналогии с (4.17) вычислим ускорение к концу первого интервала:
 , (4.23)
, (4.23)
и предположим, что на первом интервале действует среднее ускорение
a(0)ср =  . (4.24)
. (4.24)
Тогда относительная скорость ротора будет выражена формулой
V(1) =  Dt. (4.25)
Dt. (4.25)
Подставляя это уравнение в (4.22), получим
Dd(2) =  Dt2 +
Dt2 +  =
=  Dt2 + a(2)Dt2, (4.26)
Dt2 + a(2)Dt2, (4.26)
или
Dd(2) = Dd(1) + КDР(1).
Приращение угла на последующих интервалах рассчитывается аналогично:
Dd(n) = Dd(n–1) + КDР(n–1). (4.27)
Если на некотором интервале времени Dti происходит отключение КЗ, то избыток мощности скачкообразно меняется от некоторой величины DР¢(i–1) до величины DР″(i–1). Приращение угла на первом интервале после отключения КЗ определится как
Dd(i) = Dd(i–1) + К  . (4.28)
. (4.28)
Расчет методом последовательных интервалов ведется до тех пор, пока угол d не начнет уменьшаться, либо не будет ясно, что этот угол неограниченно растет и динамическая устойчивость нарушается [2].
Контрольные вопросы
1. Приведите примеры больших возмущений в электроэнергетической системе.
2. Дайте определение динамической устойчивости электроэнергетической системы.
3. Дайте определение результирующей устойчивости электроэнергетической системы.
4. Назовите задачи анализа динамической устойчивости.
5. Назовите основные допущения, принимаемые при анализе динамической устойчивости.
6. Сформулируйте критерий динамической устойчивости на основе метода площадей.
7. Как определяется предельный угол отключения КЗ?
8. Как определяется предельное время отключения КЗ?
9. Запишите уравнение движения ротора синхронной машины.
Повышение устойчивости
электроэнергетических систем.
Системная автоматика
Нарушение нормального режима энергосистемы в результате воздействия аварийного возмущения приводит к возникновению следующих технологических рисков:
• недопустимому снижению надежности режима энергосистемы с высокой вероятностью нарушения устойчивости параллельной работы электростанций, узлов нагрузки;
• возникновению в энергосистеме асинхронного режима (АР), приводящего к нарушению электроснабжения потребителей, опасного для
оборудования и предрасположенного к дальнейшей эскалации с переходом одночастотного АР в многочастотный;
• недопустимому снижению напряжения, возникновению лавины напряжения с нарушением электроснабжения потребителей;
• недопустимому повышению напряжения с повреждением оборудования;
• недопустимому повышению частоты с отключением генераторов и погашением электростанций;
• недопустимому снижению частоты с погашением электростанций, возникновением лавины частоты и массовым отключением нагрузки потребителей;
• повреждению оборудования в результате его перегрузки транзитными потоками мощности.
Но представленные случаи в объединенных ЭЭС происходят крайне редко, потому что есть система противоаварийной автоматики (ПА) [11].
Автоматическое противоаварийное управление – управление режимом энергосистемы посредством специальных автоматических устройств противоаварийной автоматики (ПА), цель которого заключается в предотвращении развития нарушений нормального режима, сопровождающихся высокой скоростью изменения его параметров, при которой неэффективны системы автоматического и оперативного управления нормальными режимами [12].
Система противоаварийной автоматики – комплекс устройств противоаварийного управления, состоящий из совокупности подсистем, предназначенных для обеспечения предотвращения и развития нарушений нормального режима в пределах своей области управления (энергоузла, энергорайона, энергообъединения).
По целям управления ПА делится на автоматики:
• предотвращения нарушений устойчивости в ЭЭС (АПНУ);
• предотвращения недопустимых для оборудования режимов и обеспечения живучести энергосистемы (АЛАР, АОПЧ, АОСЧ, АОПН, АОСН, АОПО);
• восстановления электроснабжения (ЧАПВ).
Существует три вида ПА [12].
Централизованная система ПА – система, контролирующая совокупность схемно-режимных параметров района управления энергосистемы путем реализации управляющих воздействий, рассредоточенных в
обслуживаемом районе.
Распределенная система ПА – система устройств, действующих по общесистемному параметру и обеспечивающих его восстановление с
использованием локальных управляющих воздействий на отдельных объектах системы.
Локальные устройства ПА – устройства, контролирующие единичные местные параметры режима на объекте и обеспечивающие их возврат в допустимую область с использованием локальных управляющих воздействий.
К централизованной ПА относятся централизованные комплексы авто-матики предотвращения нарушений устойчивости энергосистемы (ЦСПА, ЦПА).
К распределенным относятся:
– автоматика ограничения снижения частоты (АОСЧ);
– автоматика ограничения повышения частоты (АОПЧ).
К локальным относятся:
– автоматика ограничения снижения напряжения (АОСН);
– автоматика ограничения повышения напряжения (АОПН);
– автоматика ликвидации асинхронного режима (АЛАР);
– автоматика ограничения перегрузки оборудования (АОПО).
Автоматическое противоаварийное управление режимом энергосистемы осуществляется для предотвращения нарушений устойчивости, ограничения развития и прекращения аварийных режимов, возникающих, как правило, при коротких замыканиях, повреждениях оборудования, отказах релейной защиты, и сопровождающихся высокой интенсивностью изменения параметров режима, нарушением электроснабжения потребителей на значительной территории, обесточиванием ответственных потребителей (включая собственные нужды электростанций).
Противоаварийная автоматика ЭЭС находится во взаимодействии с релейной защитой (РЗ), средствами технологического и режимного управления в энергосистеме, включая АПВ, АВР, автоматическое регулирование возбуждения синхронных машин, автоматическое регулирование частоты и активной мощности (вместе с автоматическим ограничением перетока).
Подсистемы ПА (рис. 5.1), функционируя совместно, должны взаимно дополнять и резервировать друг друга, образуя эшелонированную систему ПА, обеспечивающую необходимый уровень живучести ЭЭС.
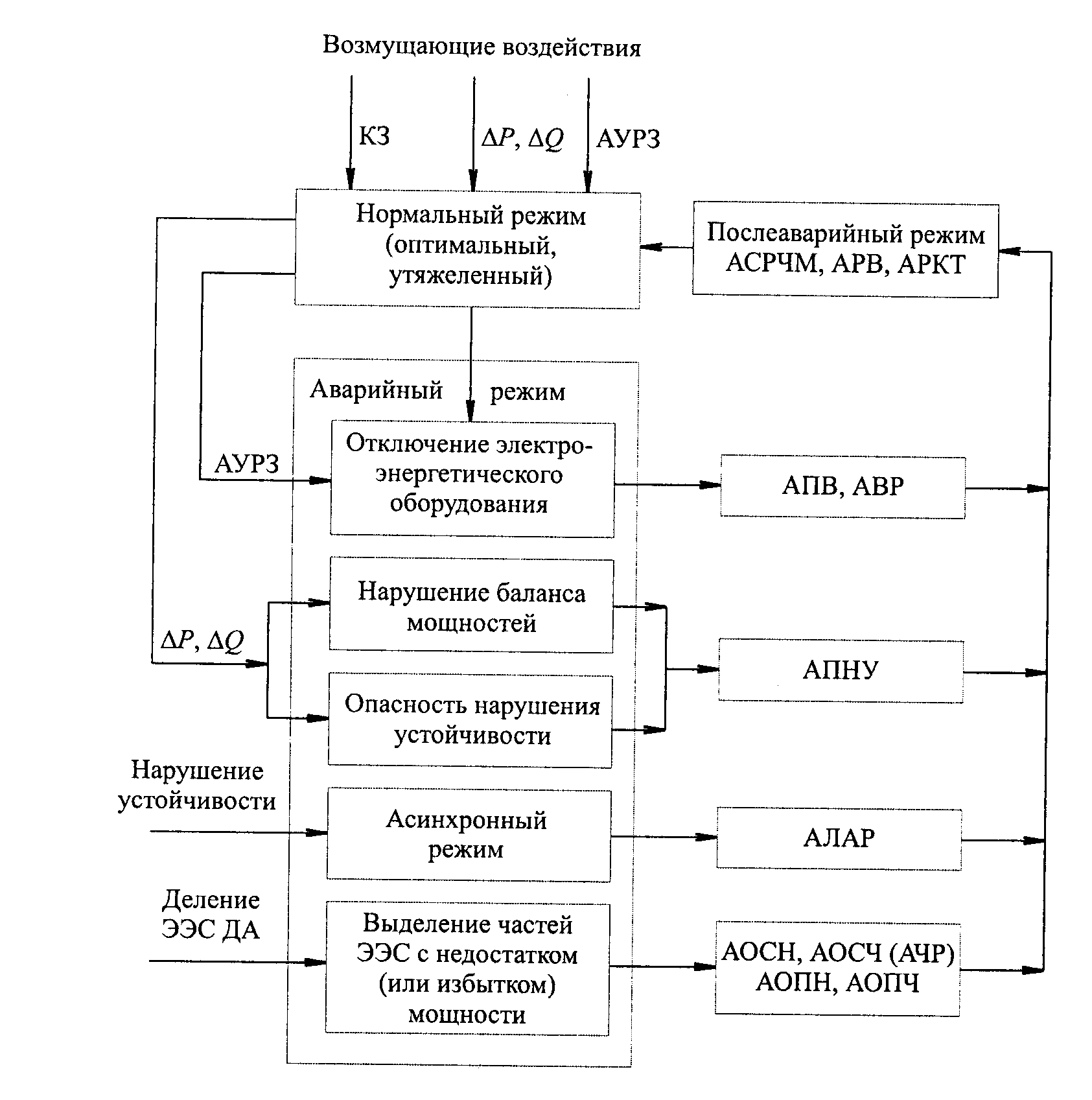
Рис. 5.1. Совместное функционирование ПА
Живучесть – это способность системы выдерживать крупную аварию без ее каскадного развития и отключения тех наиболее важных потребителей, которые не подключены к устройствам автоматической разгрузки.
Организация системы противоаварийного управления производится в соответствии с принципами:
● приоритетности противоаварийного управления перед коммерческим при возникновении аварийных нарушений режима ЭЭС;
● единообразия при построении многоуровневых комплексов.
Построение любого уровня единообразно в части структуры технических средств, системного программного обеспечения, средств внешнего взаимодействия. При этом устройства разных уровней могут различаться количеством, составом функциональных блоков и соответственно функциональными возможностями;
● ситуационной автономии в многоуровневых системах. Предполагает самостоятельность управления на нижнем уровне по собственной имеющейся информации, на базе собственных заложенных алгоритмов управления, в случаях, когда связь с устройством верхнего уровня потеряна, информация настройки от верхнего уровня отсутствует или недостоверна (рис. 5.2).
Рис. 5.2. Организация системы противоаварийного управления
ПА, как правило, использует следующие основные виды управляющих воздействий:
– разгрузка тепловых и гидротурбин (РТ);
– отключение генераторов (ОГ);
– пуск генераторов;
– загрузка генераторов (ЗГ);
– отключение нагрузки (ОН);
– программная форсировка возбуждения генераторов (ФВ);
– управление установками продольной и поперечной компенсации (включение/отключение шунтирующих реакторов, форсировка компенсации);
– деление системы на несинхронно работающие части (ДС);
– отключение линий и трансформаторов, секционных и шиносоединительных выключателей, не приводящее к ДС.
Приведем примеры управляющих воздействий.
Дата: 2019-07-24, просмотров: 913.