Содержание
Введение
1 Кинематический расчёт привода
1.1 Выбор электрического двигателя
1.2 Расчёт кинематических, силовых и энергетических параметров на отдельных валах .
1.3 Расчёт привода в Автоматизированный системах «Восход», «Кинематик».
1.4 Сравнительный анализ результатов и выбор рационального варианта
2 Расчет и проектирование зубчатого редуктора
2.1 Выбор материалов зубчатых колес. Определение допускаемых напряжений
2.2 Проектировочный расчет зубчатых передач и валов.
2.2.1 Проектировочный расчёт быстроходной ступени в системе «Восход».
2.3 Эскизная компоновка редуктора.
2.4 Проверочный расчет зубчатых передач.
2.5 Результаты расчетов напряжений, геометрических параметров выходной ступени с использованием автоматизированных систем расчета «АРМ» и «Восход».
2.6 Расчет (выбор) подшипников и уплотнений
2.6.1 Подшипники выходного вала
2.6.2 Подшипники входного вала
2.6.3 Подшипники промежуточного вала
2.7 Проверочные расчеты валов на прочность, жесткость и колебания
2.8 Результаты расчёта выходного вала в системе «APM WinMachine».
2.9 Расчет и конструирование корпуса и крепежных деталей
2.10 Тепловой расчет и смазка редуктора
3 Расчёт ременной передачи
4 Подбор, проверка и эскизная компоновка муфт
5 Расчет и проектирование тяговой звёздочки
Список используемой литературы
Введение
Целью данного курсового проекта является разработка привода цепного транспортера. Для этого были проделаны необходимые подсчёты с применением справочной литературы, методических указаний и автоматизированных методов выполнения проектно-проверочных расчётов.
Для приведения в движения привода цепного транстпортёра необходим двигатель.
Стандартные асинхронные двигатели переменного тока имеют простую прочную конструкцию и высокую степень защиты. Благодаря этому, даже при длительной эксплуатации в самых сложных условиях они обеспечивают безопасность и надежность приводной системы. Однако в любом случае решающим фактором успеха являются точное знание и соблюдение условий эксплуатации.
Стандартные двигатели переменного тока могут годами работать исправно, не нуждаясь в техническом обслуживании.
Руководствуясь вышесказанным, в начале проекта выбран, с учетом графика нагрузки, асинхронный двигатель 4A100L4Y3, для которого Nном.=4.0(кВт) nном.=1430(об/мин).
Дальнейшей разработкой привода является определение, как передаточного отношения самого привода, так и передаточного отношения редуктора. В свою очередь передаточное отношение редуктора, в соответствии с методическими указаниями, разбивается на передаточное отношение ступеней редуктора.
При проектировочном расчете зубчатых передач определяем межосевое расстояние, модуль и т.д. Для оптимизации зубчатой передачи, а вследствие и редуктора, то есть уменьшения габаритных размеров, нормальное соотношение размеров ступеней редуктора можно варьировать значением модуля, крутящим моментом, передаточным отношением, коэффициентом ширины колеса. В нашем случае будем выбирать минимальные ближайшие, стандартные значения величин.
Ручной расчет ведём только быстроходной ступени, а остальные ступени рассчитываем с применением автоматизированного варианта.
Дальнейшее проектирование сводится к проверочному расчёту зубчатой передачи. Выполняем проверочный расчёт на усталость по контактным напряжениям, проверочный расчёт по напряжениям изгиба, проверочный расчёт на заданную перегрузку.
Для выполнения эскизной компоновки редуктора необходимо знать геометрические параметры элементов. Находим диаметры валов в зависимости от крутящего момента и  - допустимое касательное напряжение. Находим диаметры валов, заплечики под колесо и подшипник. Для того, что бы колесо ни скользило по валу и передавало на вал крутящий момент, рассчитываем шпонку. И для того, что бы колесо сидело на валу и при вращении никуда не смещалось, надеваем колесо на вал с натягом, для чего проводим соответствующий расчет.
- допустимое касательное напряжение. Находим диаметры валов, заплечики под колесо и подшипник. Для того, что бы колесо ни скользило по валу и передавало на вал крутящий момент, рассчитываем шпонку. И для того, что бы колесо сидело на валу и при вращении никуда не смещалось, надеваем колесо на вал с натягом, для чего проводим соответствующий расчет.
Для вращения вала с минимальными потерями энергии в опорах, применяются подшипники. Подшипники рассчитываем на статическую Со и динамическую грузоподъемность Сr, для этого определяем реакции опор на действие окружной и радиальной силы, в некоторых случаях также учитывается действие силы от муфты или шкива. Выбираем большую силу реакции опоры, учитывая коэффициент безопасности, требуемый ресурс работы, коэффициент надежности, тип подшипника, температурный коэффициент, коэффициент вращения, и т.д. находим динамическую грузоподъемность. После чего сравниваем расчетную грузоподъемность с табличным значением для данного подшипника. Если расчетная грузоподъемность оказывается меньше табличной, то такой подшипник принимаем, если оказывается больше табличной, то этот подшипник отбраковываем, а рассматриваем подшипник более тяжелой серии.
При проверочном расчете вала определяем два опасных сечения, в которых вал испытывает значительные нагрузки. Выявляем то, которое нагружено больше всего. Проверяем статическую прочность при перегрузках, жёсткость вала, расчёт на колебания. Находим критическую частоту вращения вала. Для нормальной работы необходимо, чтобы вал вращался в докритической области, иначе вся конструкция придет в негодность.
Для уменьшения трения в зубчатом зацеплении необходимы смазочные материалы, в нашем случае масло. Объем масла должен быть такой, чтобы колесо быстроходной ступени было погружено на высоту зуба.
В зависимости от окружной скорости вращения колеса и от sв выбирается вязкость масла, а по вязкости выбирается подходящая марка масла.
Для соединения выходного вала с исполнительным органом используем управляемую муфту, которая позволяет скомпенсировать несоосность валов. При ее расчете учитываем к.п.д. привода, частоту вращения, мощность двигателя, крутящий момент на тихоходном валу. В зависимости крутящего момента и диаметра вала из справочника выбираем подходящую муфту.
Для дальнейшей разработки и изготовления редуктора необходимо наглядное представление о нем. Для этого чертятся чертежи, по которым можно точно определить месторасположения каждой детали. По необходимости выполняются местные разрезы, выноски, тем самым улучшают представление о данном участке.
На завершающей стадии проектирования вычерчивается сборочный чертеж, по которому судят о расположении и взаимодействии отдельных элементов привода.
По выполнении проектирования делается анализ всех произведённых действий, рассматриваются желаемые, но не учтённые по техническим причинам параметры.
Вывод
Из таблицы сравнения результатов видно, что отклонения полученных результатов незначительны. Немного не сошлись величины, полученные для каждой отдельной ступени привода. Это может объясняться несколькими причинами. Например, несовершенством эмпирически полученных и выведенных формул. При автоматизированном расчете многие операции недоступны для пользователя, поэтому сделать проверку на каждом этапе работы невозможно. Так что действия, выполняемые программой мы увидеть не можем. При этом различным оказалось разбиение передаточного отношения по ступеням. С этой точки зрения, на мой взгляд, целесообразней взять вариант ручного расчета, так как здесь мы можем с большей лёгкостью варьировать рассчитываемые параметры.
Подшипники выходного вала
Были назначены радиальные однорядные шарикоподшипники лёгкой узкой серии №211 с параметрами: динамическая грузоподъёмность C=34000 Н, статическая грузоподъёмность C0=25600 Н, Lh – 20000 часов (по таблице 16.4[3]), t<100˚C.
Определим силы в зацеплении: Ft=2T/d=2·601,7/0,2425=4962,5 Н, Fa=Ft·tgβ=Ft·tg0˚=0 Н, Fr=Ft·tgα=Ft·tg20˚=1806,2 Н.
Расчёт на выносливость
 (2.6.1),
(2.6.1),
Где сд – динамическая грузоподъёмность подшипника (эквивалентная радиальная нагрузка, которую подшипник выдержит 106 циклов при работе без отказа с вероятностью 90%);
P – эквивалентная нагрузка;
p – показатель степени (для шарикоподшипников равен 3);
a1 – коэффициент надёжности (у нас равен 1);
a23 – коэффициент работы (в нашем случае равен 1);
L – ресурс в миллионах оборотов.
P=(XVFr+YFa)·kδ·kt (2.6.2),
где V – коэффициент вращения кольца (в нашем случае равен 1);
X, Y – коэффициенты совместного влияния нагрузок;
kδ – коэффициент безопасности (учитывает условия работы);
kt – температурный коэффициент (для t<100˚C равен 1).
Ресурс в миллионах оборотов выражается через долговечность формулой:
 (2.6.3)
(2.6.3)
Осевая нагрузка равна нулю, тогда по таблице 16.5[3] X=1, Y=0. По рекомендации к формуле 16.29[3] принимаем kδ=1,4.
Рассчитаем эквивалентную нагрузку по (2.6.2): Р=(1·1·1806,2+0)·1·1,4=2528,7 Н. Найдём ресурс подшипника  (млн. оборотов). Отсюда динамическая грузоподъёмность подшипника
(млн. оборотов). Отсюда динамическая грузоподъёмность подшипника 
Условие Сд<[Сд]=Спаспортное=34000 Н выполняется, значит, увеличивать серию по ширине не придётся.
Проверка на статическую грузоподъёмность не проводится из-за большой окуружной скорости на валах.
Подшипники входного вала
Были назначены радиальные однорядные шарикоподшипники лёгкой узкой серии №205 с параметрами: динамическая грузоподъёмность C=14000 Н, статическая грузоподъёмность C0=6950 Н, Lh – 20000 часов (по таблице 16.4[3]), t<100˚C.
Определим силы в зацеплении: Ft=2T/d=2·50,9/0,064=1590,6 Н, Fa=Ft·tgβ=Ft·tg0˚=0 Н, Fr=Ft·tgα=Ft·tg20˚=578,9 Н.
Коэффициенты X, Y, kδ, kt, а1, а23 для формул (2.6.1) и (2.6.2) остаются прежними. Рассчитаем эквивалентную нагрузку по формуле (2.6.2): Р=(1·1·578,9+0)·1,4·1=810,5 Н. Найдём ресурс подшипника  (млн. оборотов). Отсюда динамическая грузоподъёмность подшипника
(млн. оборотов). Отсюда динамическая грузоподъёмность подшипника 
Условие Сд<[Сд]=Спаспортное=14000 Н выполняется, значит, увеличивать серию по ширине не придётся.
Расчёт ременной передачи
По графику рис.12.23 [3] выбираем сечение ремня. Рекомендуют сечение А. По графику рис.12.25 [3], учитывая рекомендацию 12.31 [3], принимаем dр1=190 мм и находим Р0=3 кВт. Рассчитываем геометрические параметры передачи: dр2= dр1.iрем=190.2=380 мм, по ряду Ra40 принимаем dр2=400 мм. По рекомендации 12.29[3] предварительно принимаем а9= dр2 =400 мм. По формуле: l=2.a+0.5π(d1+d2)+(d1-d2)2/4∙a (3.1)
находим: l=2.400+0.5π(400+190)+(400-190)2/4∙400=1753,8 мм.
По таблице 12.2 принимаем l=1800 мм.
По формуле:
 , (3.2)
, (3.2)
где l - длинна ремня, l=1800 мм,
d1 и d2 - диаметры соответствующих шкивов, d1=400 мм и d2=190 мм,
а - межосевое расстояние,
уточняем:

По формуле: a=1808-57(d2-d1)/a=1808-57(400-190)/423,8=151,88 (3.3)
вычисляем угол обхвата ремня малого шкива. Значение находится в допускаемых пределах (см.рекомендации.12.29[3]).
По формуле: Pp=P0.Ca.Cl.Ci/Cp, (3.4), где Сa - коэффициент угла обхвата. Здесь Сa=0.925 (см. стр.272[3]),
Сl - коэффициент длинны ремня, по рис.12.27[3] Сl=1,03,
Ci - коэффициент передаточного отношения, по рис.12.28[3] Ci=1.125,
Cp - коэффициент режима нагрузки, учитывая, что нагрузка с умеренными колебаниями, принимаем Cp=1.2, определяем мощность Рр передаваемую одним ремнем: Pp=3.0.925.1,03.1.125/1.2=2,7 кВт
По формуле: Z=P/Pp.Cz, (3.5), где P - мощность на ведущем валу передачи, Cz - коэффициент числа ремней, Cz=1, так как 1 ремень, определяем число ремней. Z=3,84/2,7.1=1,42,условие z[6 выполняется.
По формуле: F0=0.85.P.CP.Cl!(Z.y.Ca.Ci)+Fy, (3.6), где Fy=r.A.y2 - центробежная сила, А - площадь сечения, А=138.10-6 м2, r=1250 кг/м3, y - скорость ремня при расчетной частоте вращения: y=π.dp1.n1/60=3.14.0.19.1430/60=14,4 м/с, Fy=1250.138.10-6.14,42535,6 H, находим предварительное натяжение ремня: F0=0.85.3,84.103.1.2.1,03!(1.14,4.0.925.1.125)+35,6=304,8 H.
По формуле:
 , (3.7)
, (3.7)
сила, действующая на вал при b/2=(180-a)/2=(180-151,8)/2=14,1, в статическом состоянии передачи: Fr=2.304,8.cos14,185591,2 H,
при n51430 мин-1 Fr=591,2-2.Fv.Z=591,2-2.35,6.1=520 H
В нашем случае влияние центробежных сил мало.
Ресурс наработки ремней находим по формуле: T=Tcp.k1.k2, (3.8)
где k1 - коэффициент режима нагрузки, k1=1,
Тср - ресурс наработки для эксплуатации при среднем режиме нагрузки, Тср=2000ч.,
k2 - коэффициент климатических условий, k2=1.
Т= Тср=2000ч.
Расчёт ременной передачи в «APM WinMachine».
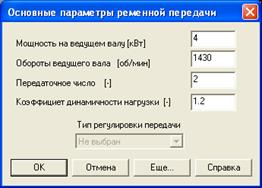
рис. 11 Ввод данных для расчёта ременной передачи
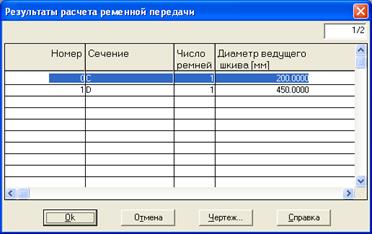
рис. 12 Результаты расчёта ременной передачи
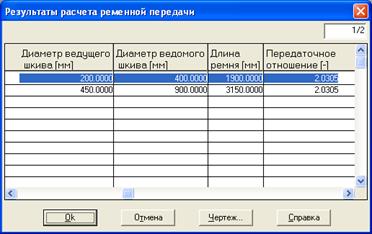
рис. 13 Результаты расчёта ременной передачи
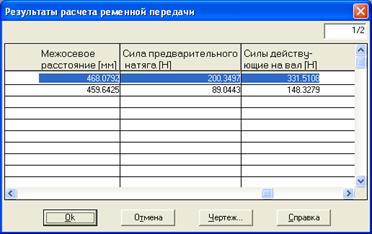
рис. 14 Результаты расчёта ременной передачи
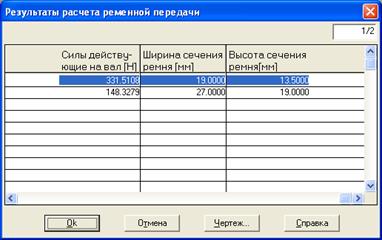
рис. 15 Результаты расчёта ременной передачи
Вывод
Как видно, основные геметрические параметры передачи, расчитанные вручную и автоматизированно практически схожи. Различие лежит в переделах 10%, что доказывает правильность ручного расчёта.
Список используемой литературы
1. Иванов М. Н. и Иванов В.Н. Детали машин. Курсовое проектирование. Учеб. пособие для машиностроит. вузов. М.,²Высш. школа², 1975 – 551с.
2. Савин Л.А., Борисенков В.А., Куликов Р.Н. Кинематический расчёт механических приводов: Методическое пособие к курсовому проектированию по основам конструирования и деталям машин. Орёл ГТУ. Каф. “ТММ”. – Орёл, 1997. – 16с.: ил.
3. Иванов М. Н. Детали машин: Учеб. для студентов высш. техн. учеб. заведений - 5-е изд., перераб.-М.:Высш. шк., 1991. – 383с. ил.
4.Дунаев П.Ф., Леликов О.П. Конструирование узлов и деталей машин:Учеб. пособие для машиностроит. спец. вузов–4-е изд., перераб. и доп.-М.:Высш. шк., 1985 – 416с., ил.
5.Анурьев В.И. Справочник конструктора-машиностроителя. В 3-ёх т. – 5-е изд., перераб. и доп. – М.: Машиностроение, 1978. –559 с., ил.
6. Кузьмин А.В. и др. Расчеты деталей машин: Справочное пособие. – Мн.: Высш. шк., 1986.
Содержание
Введение
1 Кинематический расчёт привода
1.1 Выбор электрического двигателя
1.2 Расчёт кинематических, силовых и энергетических параметров на отдельных валах .
1.3 Расчёт привода в Автоматизированный системах «Восход», «Кинематик».
1.4 Сравнительный анализ результатов и выбор рационального варианта
2 Расчет и проектирование зубчатого редуктора
2.1 Выбор материалов зубчатых колес. Определение допускаемых напряжений
2.2 Проектировочный расчет зубчатых передач и валов.
2.2.1 Проектировочный расчёт быстроходной ступени в системе «Восход».
2.3 Эскизная компоновка редуктора.
2.4 Проверочный расчет зубчатых передач.
2.5 Результаты расчетов напряжений, геометрических параметров выходной ступени с использованием автоматизированных систем расчета «АРМ» и «Восход».
2.6 Расчет (выбор) подшипников и уплотнений
2.6.1 Подшипники выходного вала
2.6.2 Подшипники входного вала
2.6.3 Подшипники промежуточного вала
2.7 Проверочные расчеты валов на прочность, жесткость и колебания
2.8 Результаты расчёта выходного вала в системе «APM WinMachine».
2.9 Расчет и конструирование корпуса и крепежных деталей
2.10 Тепловой расчет и смазка редуктора
3 Расчёт ременной передачи
4 Подбор, проверка и эскизная компоновка муфт
5 Расчет и проектирование тяговой звёздочки
Список используемой литературы
Введение
Целью данного курсового проекта является разработка привода цепного транспортера. Для этого были проделаны необходимые подсчёты с применением справочной литературы, методических указаний и автоматизированных методов выполнения проектно-проверочных расчётов.
Для приведения в движения привода цепного транстпортёра необходим двигатель.
Стандартные асинхронные двигатели переменного тока имеют простую прочную конструкцию и высокую степень защиты. Благодаря этому, даже при длительной эксплуатации в самых сложных условиях они обеспечивают безопасность и надежность приводной системы. Однако в любом случае решающим фактором успеха являются точное знание и соблюдение условий эксплуатации.
Стандартные двигатели переменного тока могут годами работать исправно, не нуждаясь в техническом обслуживании.
Руководствуясь вышесказанным, в начале проекта выбран, с учетом графика нагрузки, асинхронный двигатель 4A100L4Y3, для которого Nном.=4.0(кВт) nном.=1430(об/мин).
Дальнейшей разработкой привода является определение, как передаточного отношения самого привода, так и передаточного отношения редуктора. В свою очередь передаточное отношение редуктора, в соответствии с методическими указаниями, разбивается на передаточное отношение ступеней редуктора.
При проектировочном расчете зубчатых передач определяем межосевое расстояние, модуль и т.д. Для оптимизации зубчатой передачи, а вследствие и редуктора, то есть уменьшения габаритных размеров, нормальное соотношение размеров ступеней редуктора можно варьировать значением модуля, крутящим моментом, передаточным отношением, коэффициентом ширины колеса. В нашем случае будем выбирать минимальные ближайшие, стандартные значения величин.
Ручной расчет ведём только быстроходной ступени, а остальные ступени рассчитываем с применением автоматизированного варианта.
Дальнейшее проектирование сводится к проверочному расчёту зубчатой передачи. Выполняем проверочный расчёт на усталость по контактным напряжениям, проверочный расчёт по напряжениям изгиба, проверочный расчёт на заданную перегрузку.
Для выполнения эскизной компоновки редуктора необходимо знать геометрические параметры элементов. Находим диаметры валов в зависимости от крутящего момента и - допустимое касательное напряжение. Находим диаметры валов, заплечики под колесо и подшипник. Для того, что бы колесо ни скользило по валу и передавало на вал крутящий момент, рассчитываем шпонку. И для того, что бы колесо сидело на валу и при вращении никуда не смещалось, надеваем колесо на вал с натягом, для чего проводим соответствующий расчет.
Для вращения вала с минимальными потерями энергии в опорах, применяются подшипники. Подшипники рассчитываем на статическую Со и динамическую грузоподъемность Сr, для этого определяем реакции опор на действие окружной и радиальной силы, в некоторых случаях также учитывается действие силы от муфты или шкива. Выбираем большую силу реакции опоры, учитывая коэффициент безопасности, требуемый ресурс работы, коэффициент надежности, тип подшипника, температурный коэффициент, коэффициент вращения, и т.д. находим динамическую грузоподъемность. После чего сравниваем расчетную грузоподъемность с табличным значением для данного подшипника. Если расчетная грузоподъемность оказывается меньше табличной, то такой подшипник принимаем, если оказывается больше табличной, то этот подшипник отбраковываем, а рассматриваем подшипник более тяжелой серии.
При проверочном расчете вала определяем два опасных сечения, в которых вал испытывает значительные нагрузки. Выявляем то, которое нагружено больше всего. Проверяем статическую прочность при перегрузках, жёсткость вала, расчёт на колебания. Находим критическую частоту вращения вала. Для нормальной работы необходимо, чтобы вал вращался в докритической области, иначе вся конструкция придет в негодность.
Для уменьшения трения в зубчатом зацеплении необходимы смазочные материалы, в нашем случае масло. Объем масла должен быть такой, чтобы колесо быстроходной ступени было погружено на высоту зуба.
В зависимости от окружной скорости вращения колеса и от sв выбирается вязкость масла, а по вязкости выбирается подходящая марка масла.
Для соединения выходного вала с исполнительным органом используем управляемую муфту, которая позволяет скомпенсировать несоосность валов. При ее расчете учитываем к.п.д. привода, частоту вращения, мощность двигателя, крутящий момент на тихоходном валу. В зависимости крутящего момента и диаметра вала из справочника выбираем подходящую муфту.
Для дальнейшей разработки и изготовления редуктора необходимо наглядное представление о нем. Для этого чертятся чертежи, по которым можно точно определить месторасположения каждой детали. По необходимости выполняются местные разрезы, выноски, тем самым улучшают представление о данном участке.
На завершающей стадии проектирования вычерчивается сборочный чертеж, по которому судят о расположении и взаимодействии отдельных элементов привода.
По выполнении проектирования делается анализ всех произведённых действий, рассматриваются желаемые, но не учтённые по техническим причинам параметры.
Кинематический расчёт привода
Дата: 2019-05-28, просмотров: 323.