Под задачей компоновки КС понимаются задачи объединения модулей низшего (i — 1)-го уровня в модули более высокого i-го уровня по заданному критерию или набору критериев оптимизации и при наличии заданных ограничений.
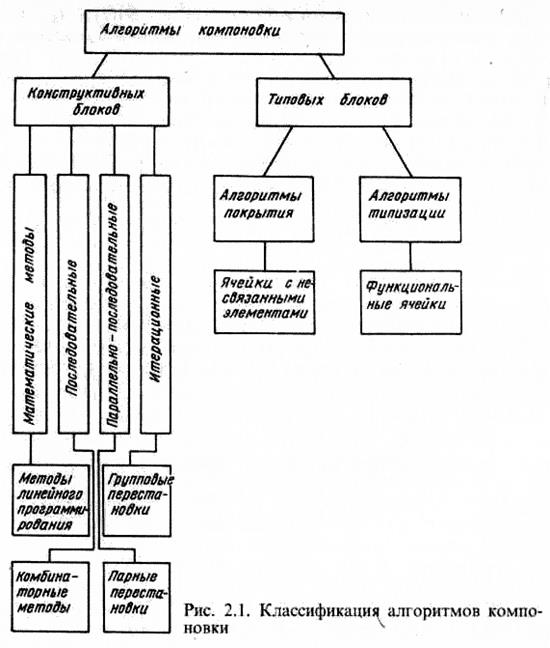
Среди методов компоновки КС РЭС выделяют два характерных класса. К первому классу относятся такие, в которых осуществляется разбиение КС на части (блоки) с учетом таких ограничений, как число элементов в блоках, число внешних выводов на блоках, суммарная площадь, занимаемая элементами и соединениями, и т. д. Основными критериями для такого разбиения являются следующие:
число образующихся блоков;
число межузловых соединений или внешних выводов на блоках;
задержки в распространении сигналов;
электро-магнито - тепловая совместимость элементов и т. д.
Задачи такого вида возникают при разбиении КС на блоки большей степени сложности, к которым не предъявлены требования в отношении схемной унификации. Это задачи распределения ТЭЗ по панелям, микросборок по печатным платам, разбиение КС на БИС, СБИС. К первому классу задач компоновки относят такие, в которых критерии оптимизации и ограничения могут быть сведены к определенным конструктивным параметрам расположения отдельных элементов и их межсоединений. Эти задачи называются задачами компоновки конструктивных частей (блоков).
Второй класс образуют такие методы, в которых кроме конструктивных характеристик образующихся частей существенны и их функциональные характеристики. Они возникают на этапе перехода от функциональных (логических) схем ЭВА к КС, ориентированным на заданную систему элементов, состоят в назначении элементов логической схемы в типовые модули из заданного набора. Указанный класс называют методом покрытия или задачами компоновки типовых блоков. Основными критериями при покрытии схем являются следующие:
число модулей, необходимых для покрытия исходной схемы;
число межмодульных соединений;
число типов используемых модулей;
число неиспользованных элементов во всех модулях схемы и т. д.
В качестве ограничений выступают конструктивные и функциональные характеристики типовых модулей, такие как:
максимально допустимое число элементов (i—1)-го уровня в модулях
i-го уровня;
максимально допустимое число выводов модуля i-го уровня;
ограничения на совместную работу модулей (i— 1)-го уровня и т. д.
Задачи компоновки являются классическими примерами многокритериальной оптимизации (ЗМО).
Для алгоритмизации и формального решения задачи производится переход от КС к графу, к мультиграфу, к гиперграфу.
Задача типизации
Рассмотрим задачу типизации. Типизация, как отмечалось,— это разбиение схемы на части с минимизацией номенклатуры частей разбиения. В зависимости от постановки задачи проектирования различается постановка задачи типизации. Так, при проектировании твердотельных БИС под однотипными понимают ТЭК, имеющие одинаковый состав элементов. При этом не оговаривается, различаются ли в ТЭК схемы соединений. При решении задачи компоновки часто добавляется требование совпадения схем соединений ТЭК с точностью до элемента.
Однотипными называются ТЭК, имеющие одинаковый состав элементов и одинаковую КС с точностью до инвариантного контакта (ТЭК функционально одинаковы). В этом случае задача типизации формулируется А. М. Бершадским как задача выделения в графе изоморфных подграфов. Поскольку элементы КС могут быть различных типов, то в общем случае используются графы G* (с весами на вершинах и ребрах).
Задача выделения в графе G* изоморфных подграфов формулируется следующим образом: найти разбиение графа G* на множество групп Г = {Г1, Г2, ..., Гf} изоморфных подграфов Гi, удовлетворяющих следующим условиям:
любые два подграфа Gij и Gi,m, принадлежащие произвольной группе разбиения Гi должны быть изоморфны;
множества вершин любых двух подграфов разбиения не должны пересекаться;
число вершин любого подграфа разбиения не должно превышать заданное (конструктивное ограничение, связанное с числом элементов на типовом элементе конструкции);

4) суммарное число внешних ребер каждого подграфа не должно превышать заданное (конструктивное ограничение, связанное с числом элементов разъема или длиной параметра корпуса ТЭК).
Критерием оптимальности при типизации является минимальное число групп изоморфных подграфов, полученных в результате разбиения, т. е. minfφ Для решения задачи типизации путем сведения ее к задаче выделения в графе изоморфных подграфов необходимо:
1) описать исходную КС с помощью графовой модели;
2) решить для графа задачу выделения в нем изоморфных подграфов;
3) от полученных результатов решения задачи на графе необходимо перейти к результатам решения задачи типизации в КС.
В случае обработки КС большой размерности с большим числом инвариантных контактов элементов целесообразно использование гиперграфовой модели.
Алгоритм А. М. Бершадского выделения в графе изоморфных подграфов имеет следующий вид:
1°. Объединяются равноинвариантные вершины графа G = ( X , U ) в группы Гki (к— шаг выделения изоморфных подграфов, начальный шаг ki = 0).
2°. Определяются группы Гki с мощностью множества, равного 1 (t=1), и производится исключение их из дальнейшего рассмотрения.
3°. Определяется число возможных объединений групп Г k i : L = l ( l —1)/2, где l—число групп Гki.
4°. Объединяются группы Гki и Гki и определяются группы изоморфных подграфов Гki+1, имеющих мощность t = k + 2. Процесс выделения изоморфных подграфов заключается в выборе максимального числа одинаковых (но не нулевых) элементов подматрицы R[Гki \ Гkj], расположенных в разных строках и столбцах рассматриваемой подматрицы, где R[Гki \ Гkj]— подматрица матрицы R исходного графа, расположенная на пересечении строк, соответствующих вершинам хiєГ;, и столбцов, соответствующих вершинам хjєГj.
5°. K = Ki +1 означает переход к следующему шагу наращивания изоморфных подграфов.
6°. Для каждой полученной на предыдущем шаге группы определяется исходный массив М k i , содержащий вершины, не вошедшие в группу Гki:

7°. Разбиение массивов М k i на группы равноинвариантныхвершин Гki, аналогично выполняемым в 1°.
8°. Определяются группы Г k Mi с мощностью t =1и исключаются из дальнейшего рассмотрения:
где р— число групп Г k Miс мощностью t=1; М* i К— массив, оставшийся для дальнейшего наращивания изоморфных подграфов после исключения групп Г k Miс t =1.
9°. Для каждого массива М* i Кпроверяются условия М* i К ≠0. Если условие для всех массивов не выполняется, то дальнейшее наращивание изоморфных подграфов невозможно, так как отсутствуют равноинвариантные вершины. В этом случае — переход к 12°. Если хотя бы для одного массива условие выполняется — переход к 10°.
10°. Определяется число возможных объединений групп Гki с группами массивов М i *. Каждая из групп Гki объединяется только с группами ГkMiсвоего исходного массива М* i К :

где ht— число групп ГkMiв массиве М* i ; Тк— число групп Г Kизоморфных подграфов, которые участвуют в дальнейшем наращивании.
11°. Объединение групп Гki и ГkMi и определение групп изоморфных подграфов ГkMi +1, имеющих мощность t = k + 2 (аналогично 4°). Переход к 5°.
12°. Конец работы алгоритма.
Рассмотрим пример решения задачи типизации. Во взвешенном графе G * =( X , U ) (рис. 2.4) необходимо выделить максимальное по мощности множество изоморфных подграфов, имеющих максимальное число вершин и ребер.
Дата: 2019-02-19, просмотров: 559.