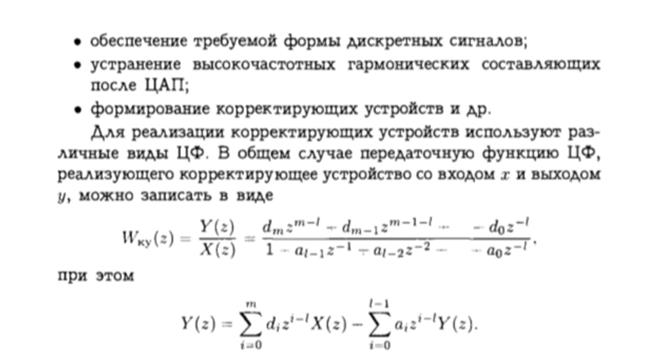
В настоящее время многие РЭС основаны на цифровой обработке сигналов, радиосистемы имеют процессорные модули, память, интерфейсы, операционную систему и т.д. Архитектура таких РЭС напоминает архитектуру ПЭВМ. Во многом это связано с тем, что практически все радиосистемы в настоящее время содержат автоматические устройства, построенные на базе микропроцессорной техники, которая имеет дело с цифровыми сигналами. Наличие микропроцессора в радиосистеме приводит к необходимости преобразования непрерывных (аналоговых) сигналов, заключающегося в их дискретизации по времени и квантовании по уровню. На выходе отдельных устройств системы цифровые сигналы преобразуются в аналоговые. Такие системы следует рассматривать как непрерывно-дискретные или цифровые системы.
Анализ и синтез цифровых систем требует введения новых понятий, появляются дополнительные элементы в функциональных и структурных схемах системы (аналого-цифровые преобразователи, цифро-аналоговые преобразователи и др.), а также программное обеспечение для микропроцессоров или ЭВМ, используемых в контуре управления. При переходе от описания работы радиосистем обыкновенными дифференциальными уравнениями (непрерывными по времени) к разностным уравнениям, используемым для дискретных систем, возможны качественные изменения свойств системы, в частности из управляемой система может стать неуправляемой. В дискретных системах (ДС) используются различные виды сигналов, получаемых в результате квантования и аналого-цифрового преобразования непрерывного по времени и амплитуде сигнала x(t) (рис. 4.9, а).


К этим сигналам относятся следующие:
• непрерывный по амплитуде и дискретный во времени сигнал (амплитудно-импульсный модулированный сигнал) x(kT0,h), к = 0.1.2.... с постоянным шагом квантования Т0 при длительности импульса h (рис. 4.9, б),
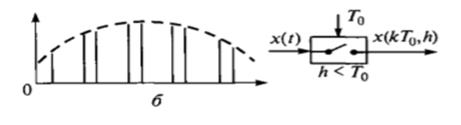
в моменты времени t = кТ0, к = 0 . 1 .2 ...., для него имеет место
х (кТо, h ) = x(t)
• решетчатый непрерывный по амплитуде и дискретный во времени сигнал (амплитудно-модулированный дискретный сигнал) х(кТо), получаемый аналогично x(kT0,h) при h << Т 0 (рис. 4.9, в),

при этом
х(к То) = х(кТ0, h) = x(t), t = кТ о , к = 0 . 1 .2 ....;
• дискретный по амплитуде и непрерывный во времени с шагом квантования T 0 сигнал ха(кТо) (рис. 4.9, г),

при этом
ха (кТ о ) = x(t), t = кТ о , к = 0,1. 2...:
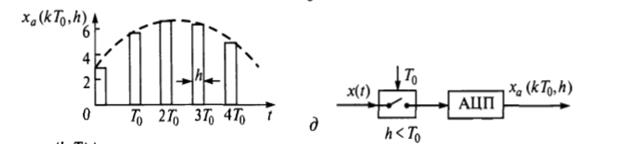
• дискретный по амплитуде и во времени сигнал х а ( kT 0 , h ), к = 0.1, 2, (рис. 4.9, д);
• решетчатый дискретный по амплитуде и во времени сигнал (рис. 4.9, е)


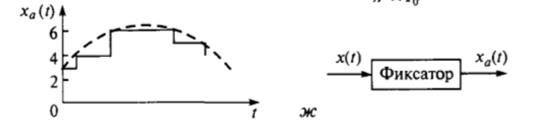
• дискретный по амплитуде и непрерывный во времени (ступенчатый) сигнал xa ( t ) (рис. 4.9, ж).
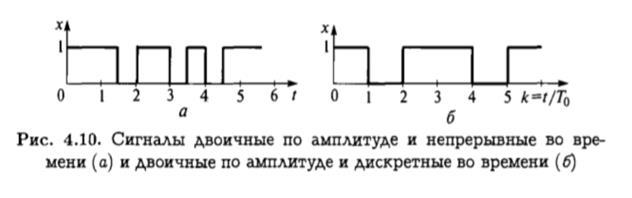
Наряду с перечисленными в дискретных системах могут применяться двоичные по амплитуде и дискретные во времени сигналы (рис. 4.10), поток битов, полосовые цифровые сигналы и др.
В автоматических радиосистемах (АРС) информация поступает в цифровое управляющее устройство в дискретные моменты времени t = кТ 0 , к = 0,1.2,..., поэтому между моментами дискретизации АРС является разомкнутой, т. е. сигнал y(t) с выхода системы по каналу обратной связи на вход не поступает. Кроме того, обработка информации при формировании сигнала управления приводит к появлению времени запаздывания между уа(к,Т0) и u а (к, То), причем сигнал u(t)зависит не только от алгоритма управления, но и от используемого цифро-аналогового преобразователя. Поэтому система с цифровым управляющим устройством в отсутствие помех не может обеспечить качество работы замкнутой АРС лучше, чем при аналогичной непрерывной АРС.
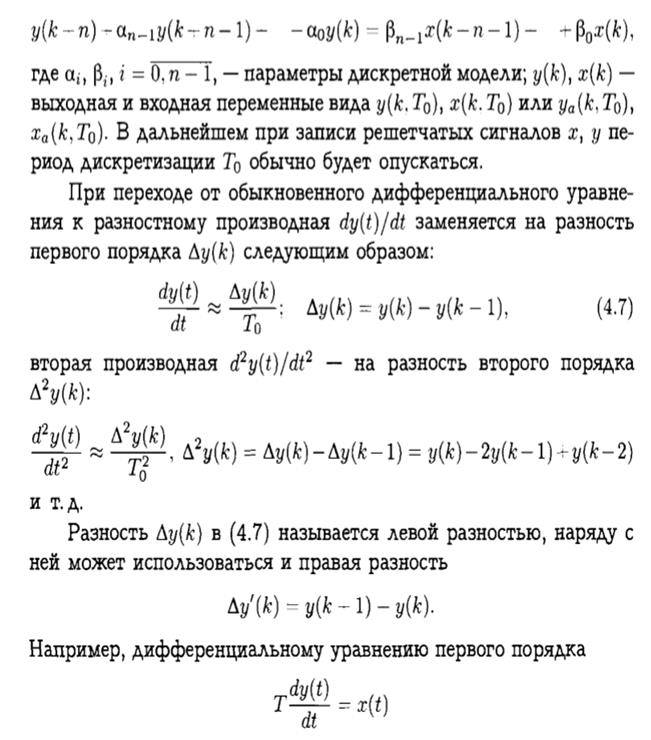
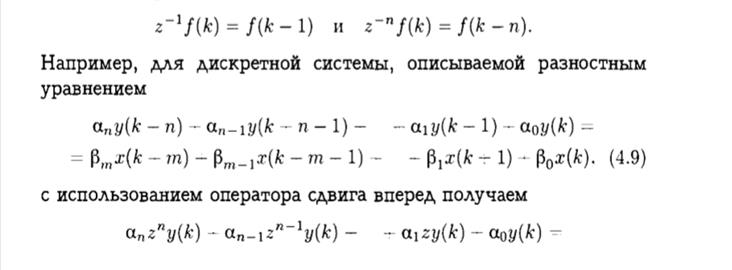
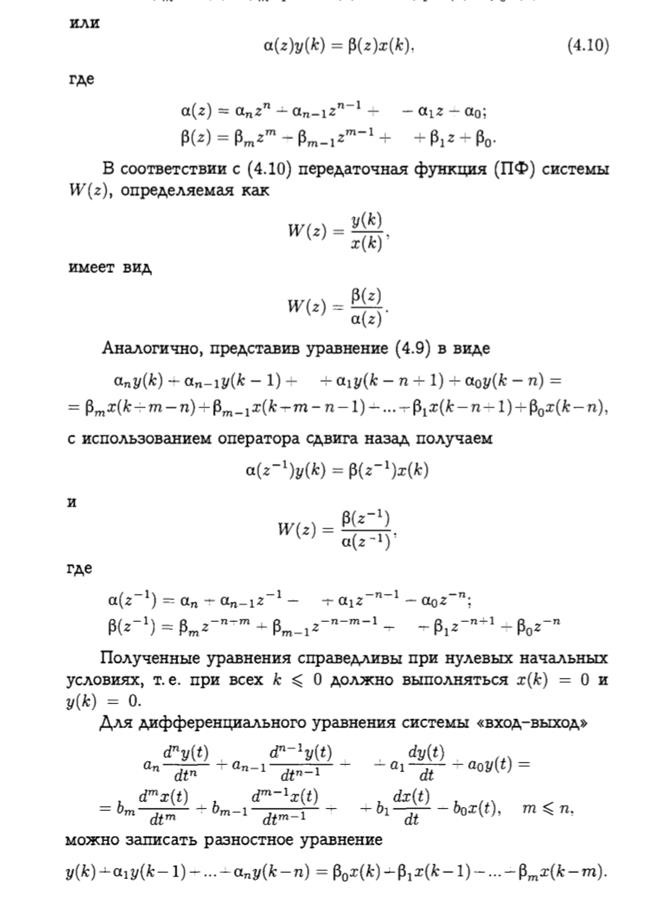
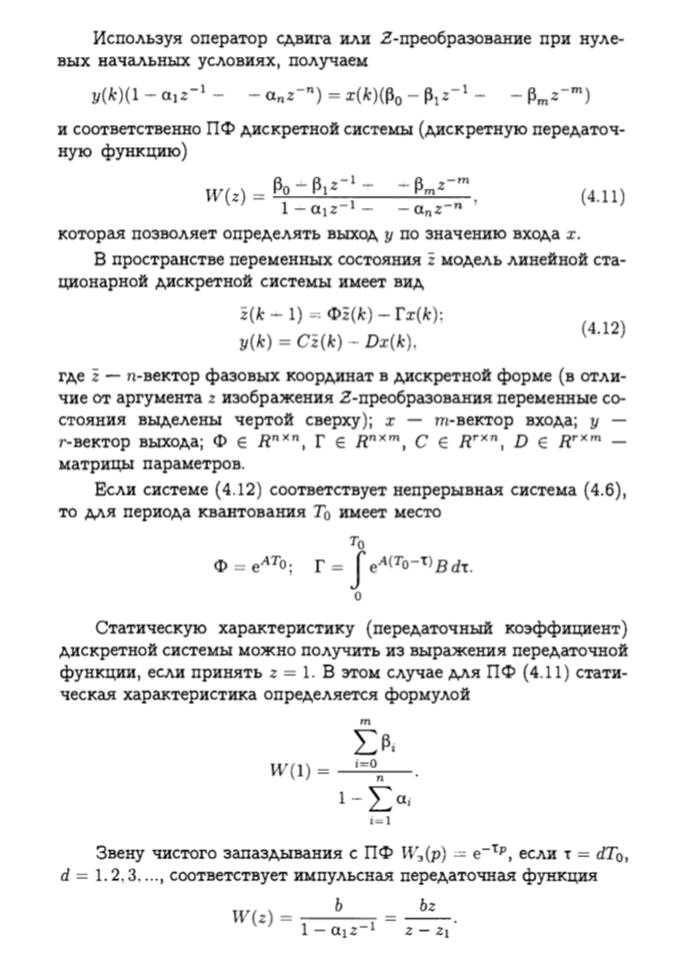
При рассмотрении ДС обыкновенным дифференциальным уравнениям, описывающим динамические режимы систем с непрерывным временем, соответствуют линейные дискретные модели в виде разностных уравнений, например


При моделировании дискретных устройствразличают синхронные и асинхронные модели.
Синхронные модели состоят из логических уравнений для описания установившихся состояний, в этих моделях переменная времени отсутствует. Их основу составляют логические операции конъюнкции (И), дизъюнкции (ИЛИ) и отрицания (НЕ), реализуемые простейшими элементами цифровых устройств — конъюнктором, дизъюнктором и инвертором (рис. 4.12).

Рис. 4.12
Этим моделям соответствуют синхронные схемы цифровых устройств, передача сигналов в них происходит с частотой синхронизирующих (тактовых) импульсов, которые вырабатываются специальным генератором и подаются на синхровходы устройств. Частота тактовых импульсов выбирается с учетом того, чтобы к моменту прихода нового синхроимпульса переходные процессы, вызванные предыдущим импульсом, практически закончились.
Асинхронные модели также включают логические операции и, кроме того, отражают временные задержки при распространении сигналов элементами и модулями РЭС. В общем виде асинхронная модель логического элемента записывается в виде
y(t) = fл [x(t — tзад)],
где fл — логическая функция; х — входной сигнал; tзад — время задержки сигнала в элементе.
В динамических системах (ДС) следует различать статические и динамические риски сбоя.
Статические риски сбоя
На рис. 6 показана работа элементовИ и ИЛИ при подаче на их входы двух последовательных во времени наборов Х1 = x1x0= 01 и Х2 = x1x0= 10. Значение сигнала у1 для элемента И на этих наборах должно оставаться постоянным и равным 0, а у2 – равным 1. Это выполняется для случаев разброса во времени моментов пере  ключения переменных x1 и x0, показанных на рис. 6, а и г.
ключения переменных x1 и x0, показанных на рис. 6, а и г.
Рис. 6. Разброс во времени моментов переключения
Если же этот разброс соответствует рис. 6, б и в, то видно, что на выходе схемы И появится логический сигнал 1 длительностью Δτ1, а на выходе схемы ИЛИ - сигнал 0 длительностью Δτ2. Эти ложные сигналы и являются рисками сбоя, причем видно, что они могут быть, а могут и отсутствовать. Все дальнейшие примеры будут иллюстрироваться временными диаграммами для наихудшего случая, когда риск сбоя обязательно имеет место.
Риск сбоя называется статическим, если у(X1) = y(Х2), где y - булева функция. Риск сбоя называется статическим в нуле S0, если у(X1) = y(Х2) = 0. Риск сбоя называется статическим в единице S1, если у(X1) = y(Х2) = 1. Итак, на рис. 6, б имеет место статический риск сбоя в нуле S0, а на рис. 6, в - статический риск сбоя в единице S1.
В идеальном случае оба перепада должны приходить в момент времени Тодновременно. Вследствие разброса времени задержек сигналы х1 и х2 могут поступить на входы так, как показано на рис. 4.13,б. В этом случае на выходе элемента появляется импульс помехи, который может привести к сбою в работе всего устройства.
Для выявления и устранения таких рисков сбоя применяют трехзначное синхронное моделирование.
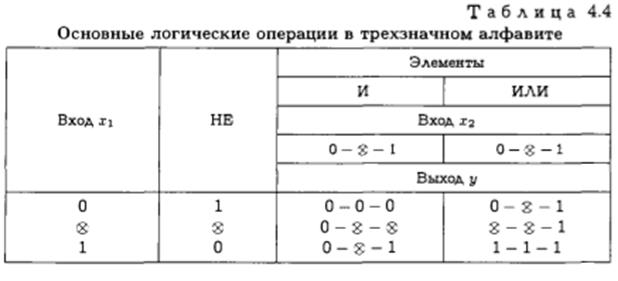
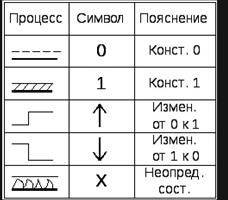
Тремя возможными значениями сигналов хі и у считают 0, 1,  , где
, где
 интерпретируется как неопределенность. В табл. 4.4 приведены правила выполнения основных логических операций И, ИЛИ, НЕ в трехзначном алфавите.
интерпретируется как неопределенность. В табл. 4.4 приведены правила выполнения основных логических операций И, ИЛИ, НЕ в трехзначном алфавите.
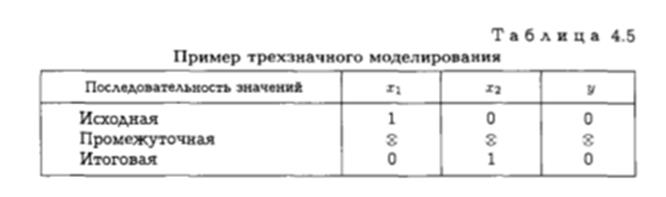
На каждом этапе решения уравнений модели элемента при анализе рисков сбоя выполняют двукратное решение, при этом рассматриваются исходные, промежуточные (после первого решения) и итоговые (после второго решения) значения переменных. Для входных сигналов х1, х2 допустимы следующие последовательности исходных, промежуточных и итоговых значений: 0 - 0 - 0, 1 – 1-1, 0 —  — 1, 1 -
— 1, 1 -  - 0. Появление последовательностей 0 - - 0 или 1 - - 1 для других переменных означает возможность статического риска сбоя.
- 0. Появление последовательностей 0 - - 0 или 1 - - 1 для других переменных означает возможность статического риска сбоя.
Результаты трехзначного моделирования для диаграммы сигналов (см. рис. 4.13,6) представлены в табл. 4.5.
Трехзначный алфавит может использоваться и в асинхронных моделях, когда неопределенное значение обусловлено случайным разбросом времени задержки t зад.
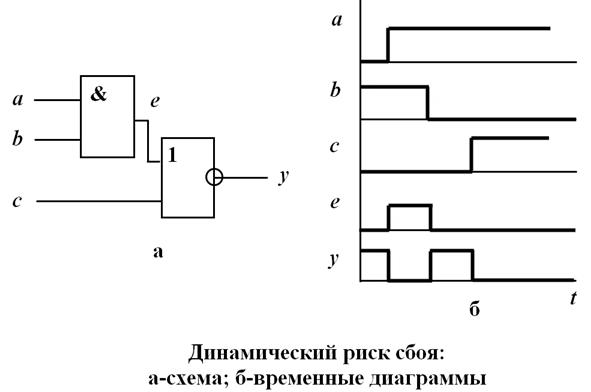
Динамический риск сбоя выражается в появлении нескольких перепадов выходного сигнала увместо одного при правильном функционировании схемы.
Динамические риски сбоя
На рис. 7, а приведена схема, реализующая функцию у= x2x1 + x0. Пусть входной набор Х1 = x2x1x0= 010изменяется на входной набор Х2 = x2x1x0= 101. На рис. 7, б приведены временные диаграммы, соответствующие наихудшему случаю разброса моментов переключения переменных x2, x1 и x0. Поскольку у(X1) = 0, а y(Х2) = 1, из рис. 7, б видно, что на выходе схемы имеет место многократное переключение вместо идеального алгоритмического перехода 01. Пусть входной набор Х1 = x2x1x0= 011изменяется на входной набор Х2 = x2x1x0= 100. Из рис. 7, в видно, что вместо идеального алгоритмического перехода 10 на выходе имеет место многократное переключение.
Рис. 7. Наихудший случай разброса во времени моментов переключения
Риск сбоя называется динамическим, если у(X1) ≠ y(Х2), где y - булева функция. Риск сбоя называется динамическим D+ при переходе на выходе 01, если у(X1) =0, а y(Х2) = 1. Риск сбоя называется динамическим D– , если у(X1) =1, а y(Х2) = 0. Итак, на рис. 7, б имеет место динамический риск сбоя D+, а на рис. 7, в - D–. Из временных диаграмм работы схемы видно, что динамический риск сбоя является следствием статического риска сбоя. Наличие динамических рисков сбоя в цифровой схеме также может привести к нарушению закона ее функционирования.
Обнаружение динамических рисков сбоя производится аналогично статистическим рискам, но с использованием пятизначного алфавита
{ 0, 1,  . E(α) , D ( β) },
. E(α) , D ( β) },
где αозначает положительный перепад, β— отрицательный перепад.
В пятизначной логике кроме трех состоянийвводят еще 2 состояния: E и D.
E – переход из состояния 0 в состояние 1,
D – переход из состояния 1 в состояние 0, причем «не Е» = D и «не D» = E,
E∨ 0=E, E∨ 1=1, E∨X=X, E∨D=X; E& 0=0, E& 1=E, E&X=X, E&D=X.
Для D точно такие же формулы бинарных операций. К символам X, E, D так же применимо свойство идемпотентности (Х ∨X = X&X = Х и т.д.).
На динамический риск сбоя указывают появления последовательностей 0 -  - 1 или 1 -
- 1 или 1 -  - 0.
- 0.
В настоящее время выпускается большое число контроллеров, которые обеспечивают цифровую обработку сигналов и расчет управляющих воздействий для объектов с несколькими входами, а также групп объектов. Эти контроллеры предусматривают функционирование с различными видами сигналов на входе и выходе — цифровыми, аналоговыми, широтно-модулированными и др.
Дата: 2019-02-19, просмотров: 397.