Бесконтактная схема управления гидравлическим рулевым приводом применяется
На пассажирских судах типа «Александр Пушкин».
На рис. 10.27 показана схема только следящего управления.
Описание схемы управления
Силовая часть схемы
Силовая часть схемы включает в себя:
1. ИД1 – приводной двигатель, вращающий насос переменной производительно-
сти ( насос Холла ).
Схема управления
Схема управления включает в себя :
1. Тр1 – силовой трасформатор 380 / 220 В;
2. Тр2 – трансформатор питания обмоток управления ОУ1…ОУ4 магнитных усилителей МУ1…МУ4;
3. сельсин-трансформатор поста управления ПУ;
4. сельсин-трансформатор насоса Холла ОС2 ( второй датчик обратной связи );
5. тахогенератор ТГ;
6. сельсин-трансформатор руля ОС1 ( первый датчик обратной связи );
7. серводвигатель руля СР;
8. магнитные усилители МУ1….МУ4;
9. выпрямительные мостики 8 и 9 ( в учебнике Головина «Судовые электрические приводы» неправильно обозначены как ФЧВ, т.е. фазочувствительный выпрямитель ).
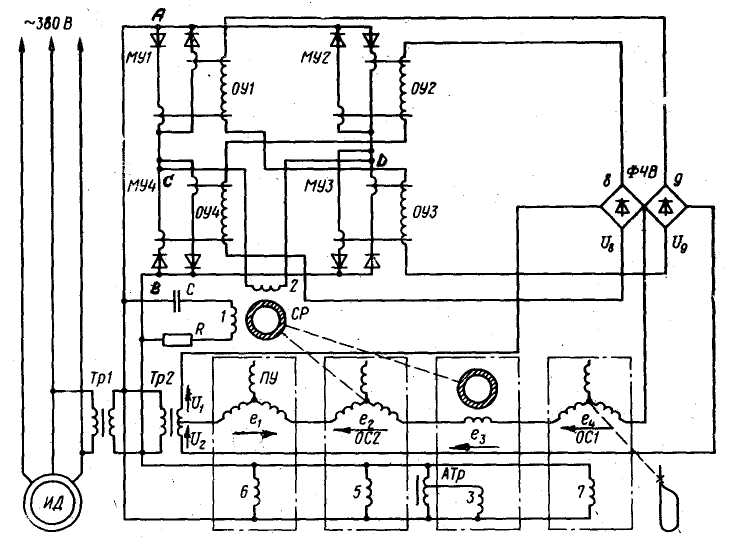
Рис. 10.27. Схема следящего управления РЭП судов типа «А. Пушкин»
Силовой трансформатор Тр1
Первичная обмотка трансформатора подключена к фидеру напряжением 380 В, питающему приводной двигатель ИД насоса Холла.
От вторичной обмотки Тр1 питаются 4 цепи:
1. цепи параллельно включенных обмоток возбуждения:
а ) сельсина-трансформатора поста управления ПУ – обмотка 6;
б ) сельсина-трансформатора ОС2 насоса Холла – обмотка 5;
в ) тахогенератора ТГ – обмотка 3 ( эта обмотка включена через небольшой автотрансформатор АТр, позволяющий регулировать напряжение на ней );
г ) сельсина-трансформатора руля ОС1 – обмотка 7;
2. первичная обмотка трансформатора ТР2;
3. обмотка возбуждения 1 серводвигателя руля СР ( последовательно с ней вклю-
чены конденсатор С и резистор R );
4. цепи рабочих обмоток реверсивного магнитного усилителя, построенного на четырех магнитных усилителях МУ1…МУ4.
Электрические машины в схеме
Сельсин-трансформатор поста управления ПУ
Состоит из статора и ротора. На статоре находится однофазная обмотка возбужде-
ния 6, на роторе – трехфазная обмотка, соединенная в звезду ( рис. 10.27 ).
Из трех фазных обмоток одна не используется, поэтому две другие по схеме соеди
нены последовательно.
Ротор сельсина-трансформатора ПУ механически соединен со штурвалом.
Этот сельсин предназначен для получения напряжения, пропорционального углу поворота штурвала.
Если штурвал, а значит, и ротор сельсина находятся в нулевом положении, выход-
ная ЭДС сельсина е1 = 0.
Если штурвал повернуть в определенную сторону, на выходе сельсина ПУ появит-
ся ЭДС е1, величина которой пропорциональна углу поворота штурвала, а фаза зависит от направления поворота штурвала.
Иначе говоря, если штурвал повернуть в другую сторону относительно нулевого положения, фаза ЭДС е1 изменится на 180º.
Сельсин-трансформатор насоса Холла ОС2
Состоит из статора и ротора. На статоре находится однофазная обмотка возбужде-
ния 5, на роторе – трехфазная обмотка, соединенная в звезду ( рис. 10.27 ).
Из трех фазных обмоток одна не используется, поэтому две другие по схеме соеди
нены последовательно.
Ротор сельсина-трансформатора ПУ механически соединен с ротором серводвига-
теля руля СР ( на схеме эта связь показана пунктирной линией между роторами СР и ОС2 ).
Ротор СР механически ( через тягу манипулятора насоса Холла ) связан с бараба-
ном насоса Холла, значит, ротор сельсина ОС2 также связан механически с барабаном насоса Холла.
Этот сельсин предназначен для получения напряжения, пропорционального смеще
нию барабана насоса Холла ( эксцентриситету насоса ).
Если барабан насоса, а значит, и ротор сельсина находятся в нулевом положении, выходная ЭДС сельсина е2 = 0.
Если барабан насоса выведен из нулевого положения в определенную сторону, на выходе сельсина ОС2 появится ЭДС е2, величина которой пропорциональна эксцентриси-
тету насоса, а фаза зависит от направления смещения барабана.
Иначе говоря, если барабан сместить в другую сторону относительно нулевого положения, фаза ЭДС е2 изменится на 180º.
Напомним, что чем больше эксцентриситет насоса, тем больше подача ( давление ) насоса и тем больше скорость перекладки пера руля.
Тахогенератор ТГ
Состоит из статора и полого ротора ( на рис. 10.27 заштрихован ). На статоре нахо-
дятся две обмотки, сдвинутые в пространстве по углом 90º - обмотка возбуждения 3 и выходная обмотка с ЭДС е3 . Ротор механически связан с валом серводвигателя руля СР ( эта связь показана при помощи пунктирной линии между роторами СР и ТГ ).
Тахогенератор предназначен для получения ЭДС е3, прямо пропорциональной ско
рости вращения вала серводвигателя СР
Действительно, из формулы ЭДС е3 = с*ω*Ф следует, что при постоянном магнит-
ном потоке Ф обмотки возбуждения 3 эта ЭДС е3 ≡ ω.
При изменении направления вращения ротора тахогенератора фаза ЭДС е3 изменя-
ется на 180 электрических градусов.
Основной характеристикой тахогенератора является зависимость выходного напря
жения Uвых ( в данном случае – выходной ЭДС е3 ) от скорости вращения ротора ω ( рис. 10.28 ).
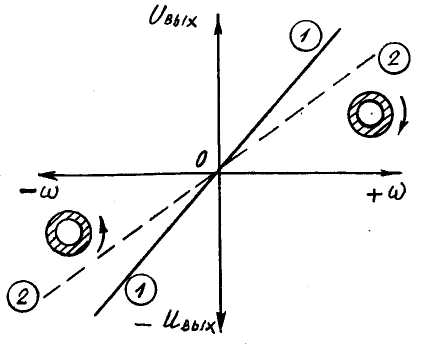
Рис. 10.28. Зависимость выходного напряжения тахогенератора от скорости враще-
ния ротора при полном ( характеристика 1 ) и ослабленном магнитном потоке ( ха-
рактеристика 2 ).
Характеристика имеет две особенности:
1. величина выходного напряжения Uвых прямо пропорциональна скорости враще-
ния ротора ω, поэтому график характеристики представляет собой прямую линию;
2. при изменении направления вращения ротора тахогенератора ( реверсе ) фаза переменного выходного напряжения Uвых изменяется на 180 электрических градусов ( см. участок характеристики, расположенный в третьем квадранте ).
В данной схеме ( рис. 10.27 ) при помощи автотрансформатора АТр можно изменять магнитный поток возбуждения тахогенератора.
Пусть характеристика 1 получена при полном магнитном потоке Ф тахогенератора ( ползунок АТр находится в крайнем верхнем положении ).
Если при помощи автотрансформатора АТр уменьшить магнитный поток возбужде
ния тахогенератора ( переместить ползунок АТр вниз ), то, как следует из формулы ЭДС е3 = с*ω*Ф, значения этой ЭДС при тех же ( т.е. одинаковых ) скоростях вращения ротора будут меньше, чем при полном магнитном потоке.
Поэтому ослабленному магнитному потоку обмотки возбуждения 3 соответствует характеристика 2.
Сельсин-трансформатор руля ОС1
Состоит из статора и ротора. На статоре находится однофазная обмотка возбужде-
ния 6, на роторе – трехфазная обмотка, соединенная в звезду. Из трех фазных обмоток одна не используется, поэтому две другие по схеме соединены последовательно.
Ротор сельсина-трансформатора ОС1 механически соединен с баллером руля.
Этот сельсин предназначен для получения напряжения, пропорционального углу поворота пера руля.
Если перо руля в диаметральной плоскости, значит, ротор сельсина находится в нулевом положении, выходная ЭДС сельсина е4 = 0.
Если перо руля повернется в определенную сторону, на выходе сельсина появит-
ся ЭДС е4, величина которой пропорциональна углу поворота пера руля, а фаза зависит от направления поворота пера руля.
Иначе говоря, если перо руля будет повернуто в другую сторону относительно нулевого положения, фаза ЭДС е4 изменится на 180º.
Серводвигатель руля СР
Состоит из статора и полого ротора, который на рис. 10.27 заштрихован. На статоре находятся две обмотки - обмотка возбуждения 1 и обмотка управления 2.
Обмотка возбуждения 1 получает питание от вторичной обмотки трансформатора Тр1, обмотка управления 2 получает питание с выхода мостовой схемы на четырех магнит
ных усилителях ( устройство и принцип действия мостовой схемы отдельно объясняется ниже ).
Основной характеристикой серводвигателя является зависимость скорости враще-
ния ротора СР ω от напряжения управления Uу на обмотке 2 ( рис. 10.29 ).
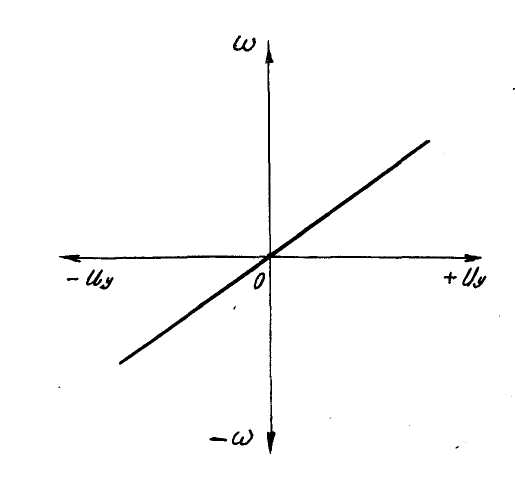
Рис. 10.29. Зависимость скорости вращения ротора серводвигателя руля СР от напряжения на обмотке управления 2
Этот серводвигатель предназначен для перемещения ( через гидроусилитель, на рис. 10.27 не показан ) барабана насоса Холла.
Чем быстрее вращается ротор, тем быстрее перемещается барабан насоса Холла, тем быстрее нарастает давление в системе гидравлики рулевой, тем больше скорость перекладки пера руля.
С одной стороны, это хорошо, но с другой быстрое нарастание давления в системе гидравлики может вызвать гидравлический удар, при котором возможно повреждение клапанов и даже разрыв масляного трубопровода.
Чтобы избежать таких ударов, в схеме используется тахогенератор ТГ, который уменьшает скорость вращения ротора СР и тем самым позволяет избежать возникновения гидравлических ударов. Более подробное объяснение действия тахогенератора в схеме приведено ниже.
Реверсивный магнитный усилитель
Устройство
Реверсивный магнитный усилитель состоит из четырех магнитных усилителей МУ1…МУ4, включенных по так называемой мостовой схеме ( рис. 10.27 ).
Эта схема изображена в несколько ином виде на рис. 10.30.
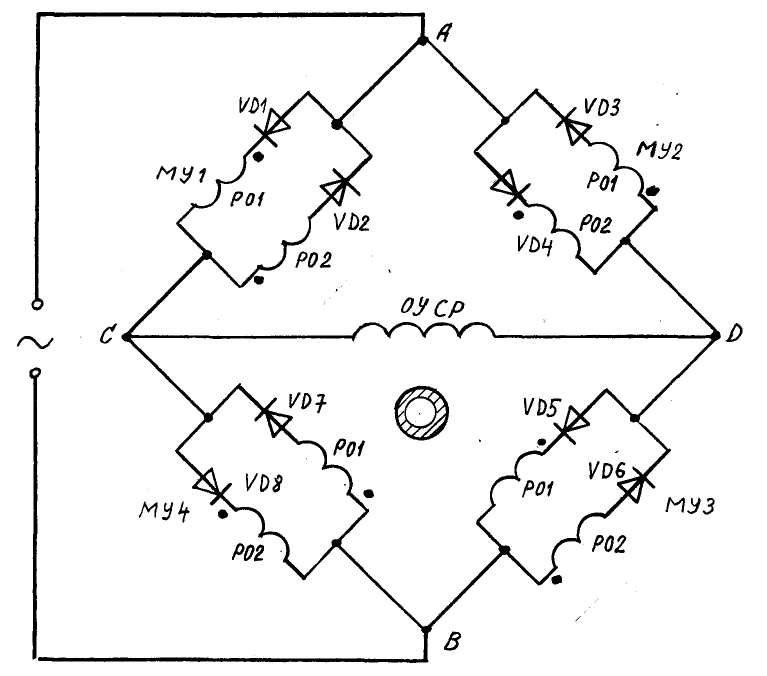
Рис. 10.30. Мостовая схема реверсивного магнитного усилителя
Как известно из курса электротехники, мостовой называется схема, имеющая четы-
ре «плеча» и две диагонали.
Применительно к данной схеме, «плечами» являются четыре магнитных усилителя МУ1…МУ4, а диагоналями – питающая ( с точками «А» и «В») и выходная ( с точками «С» и «D» ).
На входную диагональ ( точки «А» и «В» ) подается напряжение 127 В со вторич-
ной обмотки трансформатора Тр1, с выходной ( точки «В» и «С» ) снимается напряжение на обмотку управления 2 серводвигателя руля СР.
На рис. 10.30 обмотки управления ОУ магнитных усилителей МУ1…МУ4 не показаны.
Магнитные усилители
На сердечнике каждого магнитного усилителя ( рис. 10.27 ), например, МУ1, нахо-
дятся две рабочие обмотки РО1 и РО2 и обмотка управления ОУ.
Рабочие обмотки при помощи диодов VD1 и VD2 включены по схеме с внутренней положительной обратной связью.
Суть этой схемы состоит в том, что рабочие обмотки из-за диодов пропускают ток поочередно, каждая в «свою» половину периода переменного напряжения. Иначе говоря, ток в любой рабочей обмотке – выпрямленный однополупериодный.
Как известно из курса электротехники, такой ток имеет две составляющие:
1. переменную с частотой 50 Гц;
2. постоянную.
Переменная состаляющая тока позволяет рабочей обмотке сохранить индуктивное сопротивление Xl = 2π*f*L, где f = 50 Гц, L – индуктивность рабочей обмотки.
Постоянная же составляющая создает дополнительное ( помимо обмотки управле-
ния ОУ ) подмагничивание сердечника МУ и тем самым увеличивает коэффициент усиле-
ния МУ по току.
Обмотки управления ОУ1…ОУ4 ( рис. 10.27 ) включены попарно-последовательно на выходные напряжения мостиков 8 и 9: с выхода мостика 8 питаются обмотки ОУ2 и ОУ4, с выхода мостика 9 – обмотки ОУ1 и ОУ3.
Принцип действия
В исходном состоянии выпрямленные мостиками напряжения U8 и U9 одинаковы, т.е. U8 = U9 ( рис. 10.27 ).
В этом случае токи управления во всех четырех обмотках управления ОУ1……О4 также одинаковы. Это означает, что степень подмагничивания сердечников магнитных усилителей одинакова, т.е. одинаковы индуктивные сопротивления всех восьми рабочих обмоток РО1…РО2.
При этом мост уравновешен, выходное напряжение между точками «С» и «D» рав-
но нулю ( точка «0» на рис. 10.31 ).
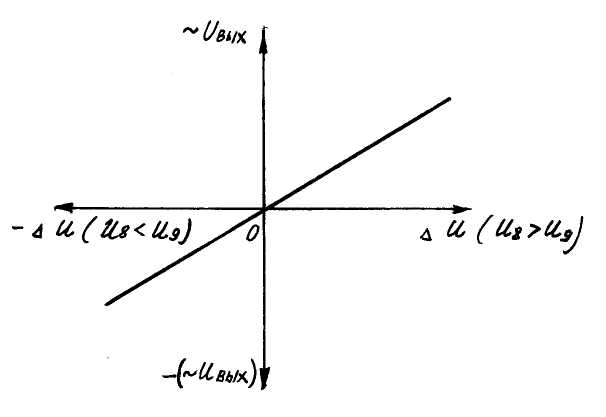
Рис. 10.31. Зависимость выходного напряжения мостовой схемы
( на обмотке 2 СР ) от соотношения между напряжениями U8 и U9
Поскольку это напряжение снимается на обмотку управления 2 серводвигателя руля, серводвигатель не вращается.
Если в результате поворота штурвала ( см. ниже ) напряжение U8 увеличится, а напряжение U9 уменьшится, ток в обмотках управления ОУ2 и ОУ4 увеличится, а в обмотках ОУ1 и ОУ3 уменьшится.
При этом индуктивные сопротивления рабочих обмоток усилителей МУ2 и МУ4 уменьшатся, а усилителей МУ1 и МУ3 увеличатся.
В результате на выходе магнитного усилителя ( точки «С» и «D» ) появится напря-
жение определенной фазы, величина которого тем больше, чем больше отличаются напря
жения U8 и U9 ( на рис. 10.31 – это участок характеристики в первом квадранте ). Ротор серводвигателя станет вращаться в определенном направлении.
Если штурвал повернуть в другую сторону, наоборот, напряжение U8 уменьшится, а напряжение U9 увеличится. Мост снова выйдет из уравновешенного состояния, но при этом фаза выходного напряжения на обмотке управления 2 серводвигателя изменится на 180º ( на рис. 10.31 – это участок характеристики в третьем квадранте ).
В результате ротор серводвигателя станет вращаться в противоположном направ-
лении.
Работа схемы
Исходное состояние
В рулевых электроприводах под исходным состоянием понимают такое, при кото-
ром штурвал находится в нулевом положении, а перо руля – в диаметральной плоскости.
В данной схеме ( рис. 10.27 ) в этом исходном состоянии:
1. ЭДС е1 = о, т.к. штурвал находится в нулевом положении;
2. ЭДС е4 = 0, т.к. перо руля находится в диаметральной плоскости;
3. ЭДС е2 = 0, т.к. барабан насоса Холла находится в нулевом положении;
4. ЭДС е3 = 0, т.к. ротор серводвигателя руля не вращается.
Поскольку эти четыре ЭДС отсутствуют, на вход мостика 8 поступает напряже-
ние U1 с верхней вторичной полуобмотки трансформатора Тр1, на вход мостика 9 – напря
жение U2 c нижней вторичной полуобмотки этого же трансформатора.
Поскольку на мостиках 8 и 9 одинаковы входные переменные напряжения, значит одинаковы выходные выпрямленные напряжения.
Поэтому токи в парах обмоток управления ОУ2+ОУ4 и ОУ1+ОУ3 одинаковы, мост на магнитных усилителях МУ1…МУ4 уравновешен, напряжение на выходе моста, снимае
мое на обмотку управления 2 серводвигателя руля, отсутствует. Ротор серводвигателя руля СР неподвижен.
Работа схемы
Для упрощения объяснения рассмотрим работу схемы ( рис. 10.27 ) без тахогенера-
тора ТГ ( его работа объясняется отдельно ниже ).
Поскольку тахогенератор исключен, в схеме остались четыре электрические машины:
1. сельсин-трансформатор поста управления ПУ;
2. сельсин-трансформатор руля ОС1;
3. сельсин-трансформатор насоса Холла ОС2;
4. серводвигатель руля СР.
Напомним следующее:
1. ротор сельсина-трансформатор поста управления ПУ механически связан со штурвалом ( мостик );
2. ротор сельсина-трансформатора руля ОС1 механически связан с баллером руля ( румпельное отделение );
3. ротор сельсина-трансформатор насоса Холла ОС2 механически связан с ротором серводвигателя руля СР ( румпельное отделение ).
При этом серводвигатель руля СР и сельсин-трансформатор насоса ОС2 размеще-
ны внутри коробки блока, который называется исполнительным механизмом насоса ( ИМ ).
Исполнительный механизм пристроен к корпусу насоса Холла и предназначен для перемещения барабана насоса Холла.
Для упрощения объяснения работу схемы при следящем управлении разделим на две части:
1. работа схемы при повороте штурвала;
2. работа схемы при повороте пера руля.
При этом между первой и второй частью нет перерыва во времени, т.е. обе части являются половинами единого процесса, который начинается с поворота штурвала, а заканчивается поворотом руля и его остановкой.
Работа схемы при повороте штурвала ( рис. 10.27 )
При повороте штурвала на определенный угол, например, вправо, ротор сельсина-
трансформатора поста управления ( ПУ ) поворачивается, и на его выходе появляется ЭДС е1. Условное мгновенное направление этой ЭДС на рис. 10.23обозначено стрелкой ( слева направо ).
Эта ЭДС совпадает по фазе с напряжением U2 и противоположна по фазе напряже-
нию U1.
Поэтому на входе мостика 9 напряжение увеличится от значения U9 = U2 ( в исход-
ном состоянии ) до значения U9 = U2 + е1.
Напротив, на входе мостика 8 напряжение уменьшится от значения U8 = U1 ( в ис-
ходном состоянии ) до значения U8 = U1 - е1.
Поэтому ток в паре обмоток ОУ1+ОУ3 увеличится, а в паре обмоток ОУ2+ ОУ4 уменьшится. В результате мостовая схема магнитного усилителя на МУ1……МУ4 выйдет из состояния равновесия, и на выходе этой схемы, т.е. на обмотке управления 2 СР, появит
ся напряжение, величина которого прямо пропорциональна углу поворота штурвала, а фа-
за зависит от направления поворота штурвала ( при повороте штурвала в другую сторону фаза этого напряжения изменится на 180º ). 
Серводвигатель СР начинает вращаться и при этом через гидроусилитель ( на схе-
ме не показан ) станет выводить барабан насоса Холла из нулевого положения и одновре
менно поворачивать ротор сельсина-трансформатора насоса Холла ОС2.
На выходе этого сельсина появится ЭДС е2, фаза которой противоположна фазе ЭДС е1.
Как только возрастающая по мере вывода барабана ЭДС е2 достигнет значения ЭДС е1, обе ЭДС скомпенсируют друг друга, и напряжения на входах мостиков 8 и 9 станут одинаковыми.
В результате токи в обмотках управления ОУ1+ОУ3 и ОУ2+ОУ4 станут одинако-
выми, мостовая схема вернется в состояние равновесия, и напряжение на обмотке управле
ния 2 уменьшится до нуля.
Серводвигатель СР остановится, успев вывести барабан насоса Холла из нулевого положения.
Из сказанного выше становится понятным назначение сельсина-трансформатора насоса Холла ОС2 – остановить барабан насоса в смещенном ( рабочем ) положении.
Продолжение - работа схемы при повороте пера руля( рис. 10.27 )
Поскольку барабан насоса смещен относительно нулевого положения, начинается кладка пера руля.
При повороте руля на выходе сельсина-трансформатора руля появится ЭДС е4,фаза которой противоположна ЭДС е1. Поскольку перед этим две ЭДС - е1 и е2 скомпенсирова
ли друг друга, их результирующее действие равно нулю. Условно можно считать, что эти ЭДС отсутствуют.
Поскольку ЭДС е4 совпадает по фазе с напряжением U1 и противоположна по фазе напряжению U2 ( cмотри направление стрелок при ЭДС е4 и напряжениях U1 и U2 ), напря
жение U8 увеличится до значения U8 = U1 + е4 , а напряжение U9 уменьшится до значения U9 = U2 – е4 .
Поэтому ток в паре обмоток ОУ1+ОУ3 уменьшится, а в паре обмоток ОУ2++ ОУ4 увеличится.
В результате мостовая схема магнитного усилителя на МУ1……МУ4 повторно выйдет из состояния равновесия, и на выходе этой схемы, т.е. на обмотке управления 2 СР появится напряжение противоположной фазы ( по отношению к напряжению, возникшему сразу после поворота штурвала - см. выше ).
Серводвигатель СР реверсирует и станет возвращать в исходное положение бара-
бан насоса Холла и, одновременно, ротор сельсина-трансформатора насоса Холла ОС2.
По мере возвращения барабана насоса в исходное положение подача насоса, а зна
чит, скорость перекладки пера руля непрерывно уменьшаются.
При движении ротора сельсина-датчика насоса Холла выходная ЭДС сельсина е2 также непрерывно уменьшается.
Таким образом, на этой второй части работы схемы ЭДС е4 на выходе сельсина-трансформатора руля ОС1 увеличивается вследствие поворота пера руля ( е4 ↑ ), а ЭДС е2 уменьшается вследствие возврата ротора сельсина-трансформатора насоса ОС2 в нулевое положение (е2 ↓ ).
Величина же ЭДС е1 на выходе сельсина-трансформатора ПУ не изменяется, т.к. штурвал после поворота удерживается в этом положении рулевым матросом.
В момент времени, когда перо руля отработает заданный штурвалом угол, барабан насоса Холла возвращается в исходное положение. Поэтому ЭДС е2 сельсина-трансформа
тора наососа ОС2 равна нулю (е2 = 0 ), а ЭДС е4 компенсирует ЭДС е1.
С этого момента времени на входах мостиков восстанавливаются одинаковые на-
пряжения U8 = U9, мост повторно возвращается в уравновешенное состояние, при котором напряжение на обмотке 2 становится равным нулю. Серводвигатель останавливается.
В результате перо руля повернуто на угол, заданный штурвалом, и остановлено. Кладка пера руля окончена.
Как видно из объяснения, барабан насоса Холла при помощи серводвигателя руля СР возвратно-поступательное движение: сначала был выведен из исходного состояния, остановлен, а затем возвращен в исходное состояние.
Описанный процесс происходит при повороте штурвала на небольшие углы, до значения ±5º.
Работа схемы управления при углах поворота пера руля свыше ±5º
При повороте штурвала на углы, большие ±5º, серводвигатель СР включает ся ( см. выше ) , смещает барабан насоса Холла до упора и останавливается ( стоянка под током ).
Поскольку ЭДС е1 сельсина-трансформатора ПУ гораздо больше, чем ЭДС е2 сельсина-трансформатора насоса, мост на магнитных усилителях МУ1…МУ4 остается рассогласованным, поэтому на валу серводвигателя руля СР сохраняется момент стоянки под током , удерживающий барабан насоса Холла в выведенном состоянии.
При этом подача насоса Холла максимальная и постоянная, а скорость поворота пера руля максимальная.
Такой режим сохраняется до тех пор, пока разность углов поворота роторов сельси
нов ПУ и ОС1 не уменьшится до 5º.
В этот момент времени сумма ЭДС ( е2 + е4 ) скомпенсирует ЭДС е1. На входах выпрямительных мостиков 8 и 9 восстановятся одинаковые напряжения U8 = U9. Мост на магнитных усилителях МУ1…МУ4 вернется в состояние равновесия, а момент на валу серводвигателя руля СР уменьшится до нуля.
Поскольку в этот момент времени барабан насоса Холла остается смещенным, кладка пера руля продолжится.
Поэтому продолжающееся за счет поворота руля непрерывное увеличение ЭДС е4 приведет к изменению соотношения между напряжениями U8 и U9, а значит, к изменению фазы напряжения на обмотке 2 серводвигателя руля СР.
Серводвигатель реверсирует и станет возвращать барабан насоса Холла в исход-
ное состояние.
Далее процесс происходит так же, как описано выше, подача насоса Холла и ско-
рость движения пера руля постепенно уменьшаются, вплоть до возврата бараба-на насоса в исходное положение, при котором перо руля останавливается.
Роль тахогенератора ТГ
Если надо резко изменить курс, например, для того, чтобы разойтись со встречным судном, штурвал поворачивают сразу на большой угол.
При таком повороте штурвала, т.е. при задании сразу больших углов кладки, проис
ходит такое же резкое рассогласование моста на магнитных усилителях МУ1…МУ4.
При этом на обмотке 2 сразу же возникает большое напряжение, и серводвигатель станет выводить барабан насоса Холла с большой скоростью. Подача насоса Холла, а зна-
чит, давление масла в системе гидравлики рулевой машины станут быстро увеличиваться, в системе возникает гидравлический удар.
В результате возможен разрыв трубопровода или повреждение прокладок клапанов на рулевой машине ( авария ).
Чтобы уменьшить скорость серводвигателя, в схеме используется тахогенератор ТГ. Ротор тахогенератора механически связан с ротором серводвигателя, а фаза выходной ЭДС е3 тахогенератора противоположна фазе ЭДС е1 сельсина-трансформатора поста управления ПУ.
Узел с тахогенератором ТГ работает следующим образом.
При резком повороте штурвала ЭДС е1 скачкообразно увеличивается, поэтому на-
чальная скорость ротора серводвигателя руля СР будет максимальной.
Однако такой же будет и скорость вращения ротора тахогенератора. Значит, ЭДС е3 также будет максимальной. Действуя в противофазе с ЭДС е1, эта ЭДС е3 снизит ско-
рость ротора серводвигателя руля СР.
Аналогично работает тахогенератор, если резко вернуть штурвал в нулевое положе
ние.
В этом случае ЭДС сельсина-трансформатора поста управления ПУ е1 резко умень-
ается до нуля, но остается ЭДС е4 на выходе сельсина-трансформатора руля ОС1.
В результате эта ЭДС уже не компенсируется при помощи ЭДС е1, мост рассогла-
суется, серводвигатель включается и перемещает барабан насоса Холла из исходного со-
стояния в противоположное тому, которое было вызвано поворотом штурвала.
При этом перо руля станет возвращаться в нулевое положение.
Поскольку серводвигатель реверсировал, ротор тахогенератора вращается в обрат
ную сторону, и фаза ЭДС е3 изменяется на обратную ( на рис. 10.27 стрелка при ЭДС е3 на
правлена слева направо ).
В этом случае фаза ЭДС е3 противоположна фазе ЭДС е4 . Поэтому действие основ
ного сигнала, в данном случае, ЭДС е4 будет ослаблено.
В результате барабан насоса Холла будет перемещаться плавно, что позволит и в этом случае избежать гидравлических ударов в рулевой машине.
При небольших углах поворота штурвала гидравлические удары не возникают. В этом случае тахогенератор способствует плавному движению руля и его мягкой останов-
ке.
Дата: 2019-02-02, просмотров: 757.