Напомним, что при простом управления в качестве органов управления используют кнопки «Лево руля», «право руля» или рычаг управления ( «джостик» ).
Руль перекладывается все то время, пока нажата одна из кнопок или рычаг вы
веден из нейтрального положения. Перекладка прекращается, если отпустить кнопку или вернуть рукоятку поста в исходное - нулевое положение.
Об угловом состоянии руля в каждый момент времени судят по рулевому указателю - аксиометру.
Обобщенная разомкнутая схема ручного управления рулем по времени показана на рис. 10.17.
Здесь представлены: РМ - рулевая машина; Н - насос переменной подачи (ГЗ - гидрозолотник в системе управления с насосом нерегулируемой подачи); ГУ – гидроусили
тель; СР - серводвигатель; У - электрический усилитель.
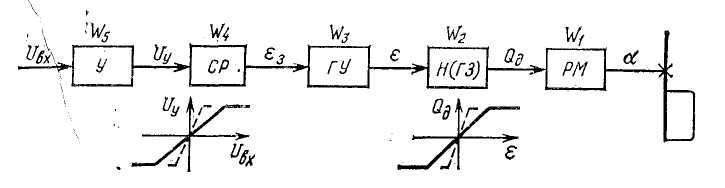
Рис. 10.17. Обобщенная разомкнутая система ручного управления РЭГ-приводом
При простом управлении рулем контур регулирования разомкнут. При подаче управляющего напряжения U  последовательно отрабатывают все звенья и начинается перекладка руля.
последовательно отрабатывают все звенья и начинается перекладка руля.
Шток поршня гидроусилителя ГУ жестко связан с манипулятором насоса Н. Перемещение манипулятора ограничено. Поэтому пропорциональность между движением золотника гидроусилителя и ходом его поршня характерна только при сравнительно малых перемещениях.
При снятии управляющего напряжения U серводвигатель СР останавливается, но подача насоса Н не прекращается.
Для остановки руля необходимо, чтобы серводвигатель включением в обратную сторону сместил манипулятор насоса в исходное положение. Таким образом, разовая перекладка руля содержит четыре операции:
1. включение серводвигателя;
2. его остановку;
3. включение серводвигателя в обратном направлении;
4. его остановку.
Поворот руля на заданный угол описанным способом даже опытному оператору ( например, рулевому матросу ) выполнить практически невозможно.
Для нормальной работы требуется, чтобы при снятии входного управляющего сигнала U = 0 серводвигатель занимал исходное положение, что соответствует прекращению подачи масла на рулевую машину.
В некоторых современных отечественных схемах управления (АТР, АИСТ) это делается специальным пружинным нуль-установителем, задача которого вернуть серводвигатель или, точнее, золотник гидроусилителя ГУ в нулевое положение ( е  = 0) после отключения.
= 0) после отключения.
Иностранные фирмы часто используют сервопривод с электромагнитным управлением. Золотник такого привода всегда имеет пружинный самовозврат.
Таким образом, простое управление рулем по структурной схеме рис.10.17 принципиально возможно.
Для этого требуется только, чтобы элементы сервопривода автоматически возвращались в исходное положение после отключения серводвигателя.
Дата: 2019-02-02, просмотров: 546.