Состав системы управления
Схемы системы управления показана на рис. 10.36.
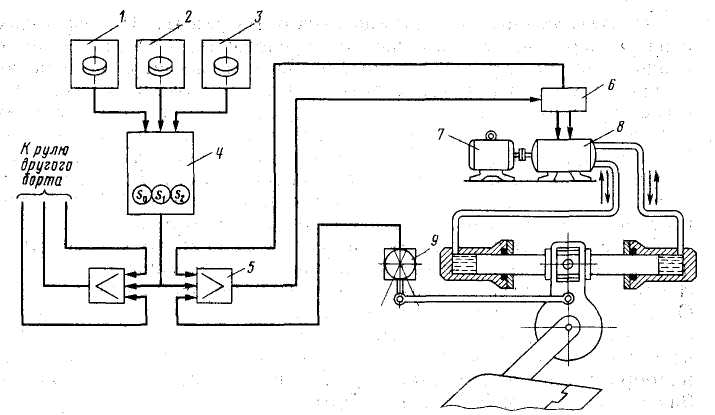
Рис. 10.36. Система управления успокоителями качки
В состав схемы управления входят следующие элементы:
1 – датчик крена, вырабатывает напряжение, пропорциональное углу крена;
2 – датчик скорости бортовой качки, его напряжение пропорционально скорости движения корпуса судна при качке;
3 – датчик ускорения, его напряжение пропорционально ускорению корпуса судна при качке;
4 – прибор управления, в нём суммируются сигналы датчиков 1, 2, 3;
5 – усилитель сигнала управления;
6 – прибор управления насосом переменной подачи, в состав которого входит датчик подачи насоса ( т.е. скорости перекладки руля );
7 – приводной электродвигатель насоса переменной подачи;
8 – насос переменной подачи;
9 – датчик угла перекладки руля.
При возникновении качки сигналы датчиков 1, 2, 3 поступают в прибор управления 4 и суммируются в нём. Суммарный сигнал через усилитель 5 поступает в прибор 6.
В результате насос начинает нагнетать масло в один из цилиндров гидропривода и всасывать из другого. Руль поворачивается и создаёт восстанавливающий момент.
Сигналы обратных связей из приборов 6 и 9 поступают в усилитель 5. Применение этих двух приборов позволяет получить следящий режим работы системы управления.
Техническая эксплуатация рулевых электроприводов
Подготовка рулевого и подруливающего устройств и авторулевого перед выходом в рейс
Перед выходом судна в рейс не ранее чем за 12 ч до назначенного времени выхода электромеханик должен:
а) осмотреть и подготовить к действию главные и вспомогательные (при наличии) электроприводы рулевого устройства ( устройства с поворотной насадкой), включая системы дистанционного и местного управления электроприводом, посты управления на мостике и в румпельном отделении , указатели положения руля, ограничители перекладки, средства сигнализации и защиты;
б) измерить сопротивление изоляции электрооборудования рулевого устройства;
в) проверить и убедиться в исправности действия всех частей рулевого устройства совместно со старшим механиком и механиком по заведованию ( обычно – 2-й механик ) в соответствии с указаниями инструкций по эксплуатации и правил технической эксплуатации вспомогательных судовых технических средств ( СТС ) путем полных перекладок руля с борта на борт при поочередной и совместной ( где это допускается инструкциями по эксплуатации )
работе электропривода и поочередном управлении электроприводом со всех постов и во всех возможных на стоянке режимах работы систем управления;
г) проверить в действии средства связи между ходовым мостиком, ЦПУ и румпельным помещением,
д) убедиться в исправности действия вентиляции и электронагревательных приборов для обогрева румпельного помещения.
В процессе подготовки рулевого устройства проверить точность показаний рулевого указателя ( аксиометра ). Разница между указанным и действительным углом положения руля ( поворотной насадки ) не должна превышать:
1. при положении пера руля в диаметральной плоскости - ± 1º;
2. при углах положения от 0º до 5º – не более ± 1,5º;
3. при углах положения от 5º до 35º – не более ± 2,5º.
Все неисправности, обнаруженные при проверке электрооборудования рулевого устройства, подлежат немедленному устранению.
О результатах проверки рулевого электропривода электромеханик и механик по заведованию докладывают старшему помощнику и старшему механику и делают соответствующие записи в вахтенном ( на мостике ) и машинном ( в ЦПУ ) журналах.
Перед выходом в рейс необходимо подготовить к действию авторулевой одновремен
но с подготовкой к действию электропривода рулевого устройства и указателей положения руля.
До начала проверки авторулевого помощником капитана по заведованию должна быть выполнена проверка соответствия репитера – датчика авторулевого показаниям основного прибора гирокомпаса.
При подготовке авторулевого к действию необходимо:
а ) осмотреть аппаратуру авторулевого;
б) измерить сопротивление изоляции,
в) произвести проверку работы авторулевого со всех постов управления в соответствии с инструкциями по эксплуатации при поочередной и совместной ( где это допускается инст-
рукциями ) работе электропривода рулевого устройства..
14.2. Техническое использование рулевого устройства
Во всех условиях плавания резервное электрооборудование рулевого устройства должно быть постоянно готово к немедленному вводу в действие со всех постов управления.
В сложных условиях плавания ( проходы проливов, съемка с якоря и т.п. ) в дополнение к работающему необходимо ввести в действие резервный ЭП рулевого устройства, если они могут работать одновременно.
В случае отказа или подачи сигнала о неисправности работающего ЭП или средств управления рулевым устройством вахтенный помощник ( ВП ) и вахтенный механик ( ВМХ ) должны немедленно принять меры по вводу в действие резервного электропривода или других средств управления рулевым устройством с последующим выводом из действия неисправных технических средств.
Электромеханик должен немедленно принять меры по устранению неисправности,, согласовывая свои действия с ВП и ВМХ.
Рекомендуется не реже одного раза в неделю переключать работающий и резервный электроприводы рулевого устройства.
Перед выводом из действий электропривода рулевого устройства руль должен быть установлен в диаметральную плоскость судна.
14.3. Техническое использование авторулевого
При техническом использовании авторулевого переход с одного вида управления на другой необходимо производить в соответствии с инструкциями по эксплуатации; при этом судно должно быть, как правило, на заданном курсе, а руль в диаметральной плоскости судна.
Коэффициент обратной связи и величина сигнала производной отклонения курса подбираются вахтенным помощником ( ВП ) в зависимости от водоизмещения судна, скорости хода и состояния моря в соответствии с инструкциями по эксплуатации так, чтобы рыскание судна было наименьшим при минимальном числе перекладок руля
При увеличении волнения моря для снижения нагрузок на рулевую машину, уменьшения числа и длительности перекладок рекомендуется увеличивать значение коэффициента обратной связи и уменьшать сигнал производной
При длительном использовании авторулевого, а также при подходе судна к районам со сложными условиями плавания совместно с ВП необходимо проверять исправность действия рулевого устройства в режимах управления "простой" и "следящий".
При обнаружении в электроприводе рулевых устройств "сползания" руля в режиме управления "простой" электромеханик совместно с механиком по заведованию ( обычно- 2-й механик ) необходимо принять меры по регулировке нулевого установителя и уменьшению люфтов в передачах, исполнительных механизмах и т.д.
Дата: 2019-02-02, просмотров: 626.