К основным деталям устройства относятся ( рис. 10.33 ):
1 – кронштейны ( 2 ), для крепления устройства к стенкам туннеля;
2 – обтекатель, для уменьшения сопротивления винта потоку воды;
3 – корпус подруливающего устройства;
4 – рычаг серводвигателя преобразователя шага винта ( угла разворота лопастей );
5 – вертикальный вал, для передачи вращающего момента от электродвигателя к винту;
6 – люк для смены лопастей;
7 – туннель;
8 – поворотная лопасть винта.
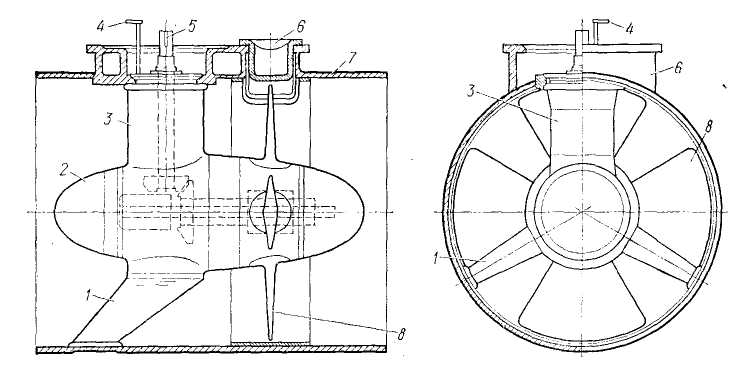
Рис. 10.33. Подруливающее устройство с винтом регулируемого шага :
Подруливающее устройство находится в туннеле 7 в носовой части судна и подвешено на двух кронштейнах 1.
Винт вращается двумя электродвигателями через редуктор ( не показан ), вертикальный вал 5 и коническую передачу ( на рис. 10.33 показана пунктиром в средней части ).
Устройство для изменения шага винта показано на функциональной схеме ( рис. 10.34 )
Функциональная схема электропривода подруливающего устройства с ВРШ
К основным деталям устройства относятся ( рис. 10.34 ):
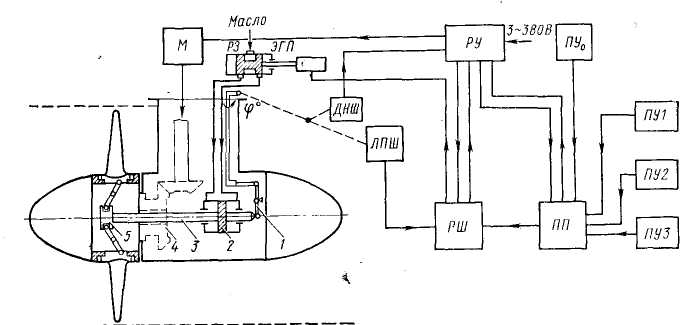
Рис. 10.34. Функциональная схема электропривода подруливающего устрой-
ства с ВРШ
ЛПШ – линейный преобразователь шага, для преобразования угла поворота лопастей винта в пропорциональное напряжение ;
ДНШ – датчик нулевого шага, представляет собой конечный выключатель, контакты которого замкнуты только при нулевом шаге лопастей винта;
М – приводной электродвигатель винта, для вращения винта;
ПП – переключатель постов управления;
ПУ1- пост управления на крыле левого борта;
ПУ2 – то же, в рулевой рубке;
ПУ3- то же, на крыле левого борта;
ПУ0 – то же, в ЦПУ;
РУ – распределительное устройство ( щит электропитания );
РШ – регулятор шага винта, для выработки напряжения, ;
ЭГП – электрогидравлический преобразователь;
РЗ – распределительный золотник;
1 – рычаг, для передачи информации о положении лопастей в ЛПШ и ДНШ;
2 – сервомотор, для создания усилия, поворачивающего лопасти винта;
3 – шток сервомотора, для передачи усилия от поршня сервомотора 2 к кондуктору 5;
4 – коническая зубчатая передача, для передачи вращающего момента электродвигателя на ступицу винта ( т.е. для вращения винта );
5 – кондуктор, устройство для непосредственного разворота лопастей винта.
Работа системы управления
Подготовка системы управления к работе
Для подготовки системы управления к работе:
1. подают питание 380 В переменного тока в распределительное устройст-
во РУ в рулевой рубке;
2. включают нажатием кнопок «Пуск» насосы смазочного масла и гидропри
вода, а также оба приводных двигателя подруливающего устройства.
Винт начинает вращаться, но упора не создаёт, т.к. в исходном положении шаг винта равен нулю;
3. выбирают необходимый пост управления, для чего нажимают кнопку «Приня-
тие управления» на корпусе выбранного поста, при этом загорается сигнальный светодиод «Управление принято». Для переключения постов управления служит переключатель постов ПП.
Система готова к работе.
Ввод системы в действие возможен при условии, что шаг винта равен нулю. Для контроля истинного значения шага винта каждый ПУ имеет светодиоды, которые загораются в положениях 0; 25; 50; 75 и 100% номинального шага винта в обоих направлениях.
Работа системы управления
Система управления представляет собой следящую систему, которая обеспечивает поворот лопастей на заданный с поста управления шаг винта.
Необходимый шаг задаётся при помощи рукоятки поста управления.
Пусть выбран пост управления ПУ2 в рулевой рубке.
При повороте рукоятки ПУ2 на необходимый угол сигнал из ПУ2, пропорциональ-
ный углу, поступает в переключатель постов ПП, в котором преобразуется в напряжение, пропорциональное заданному углу ( заданное напряжение ).
С выхода ПП напряжение поступает в электрогидравлический преобразователь ЭГП, выводящий шток распределительного золотника РЗ из нулевого положения.
При этом масло под давлением поступает через золотник в одну из полостей сервомотора 2, например, в левую. Шток сервомотора перемещается вправо и через кондуктор 5 начинает разворачивать лопасти винта. При этом величина перемещения штока пропорциональна истинному углу поворота лопастей.
В первый момент времени скорость поворота лопастей максимальная.
Перемещение штока через рычаг обратной связи 1 передаётся в линейный преобразователь шага ЛПШ. Этот преобразователь преобразует перемещение штока в пропорциональное напряжение обратной связи, фаза которого противоположна заданному напряжению.
В преобразователе ЛПШ эти два напряжения вычитаются, при этом напряжение на выходе ЛПШ, равное их разности, начинает, по мере поворота лопастей, уменьшаться.
В результате золотник ЭГП под действием возвратной пружины ( не показана )
начинает возвращаться в исходное положение, уменьшая подачу масла в цилиндр сервомотора 2. Это приводит к уменьшению скорости поворота лопастей.
Когда лопасти повернутся на заданный угол, напряжение обратной связи достигнет значения, равного заданному, поэтому напряжение на выходе ЛПШ исчезнет. При этом золотник вернется в исходное положение, шток 3 остановится.
Система управления готова к заданию нового угла поворота лопастей.
Успокоители качки
Основные сведения
В штормовых условиях крен судна достигает 35-40º. Поэтому на пассажир-
ских судах и паромах устанавливают специальные устройства – успокоители качки ( УК ) .
УК представляют собой несущие крылья симметричного профиля, располо
женные с двух бортов на скуле судна в районе плоскости миделя ( рис. 10.35 ). Часто эти крылья называют: «бортовые рули».
Эти рули закреплены на баллере. Баллер – стальной горизонтальный вал , предназначенный для передачи вращающего момента от гидравлического привода к перу рулю.
Принцип действия бортовых рулей
Рассмотрим принцип действия бортовых рулей ( рис. 10.35 )
. Пусть судно движется вперёд, а перо руля расположено в горизонтальной плоскости ( рис. 10.35, а ). Вода равномерно обтекает верхнюю и нижнюю плоскости руля и поэтому не оказывает давления на перо руля.
При опускании руля ( рис. 10.35, б ) вода начинает давить на нижнюю плоскость с силой Р. Эту силу можно разложить на две составляющие: горизонтальную Р  и вертикальную Р
и вертикальную Р  .
.
Сила Р направлена противоположно движению судна и тормозит его.
Сила Р приподымает правую половину судна и создаёт крен на левый борт.
При подъёме руля ( рис. 10.35, в ) происходит обратное явление: сила Р приподымает левую половину судна и создаёт крен на правый борт.
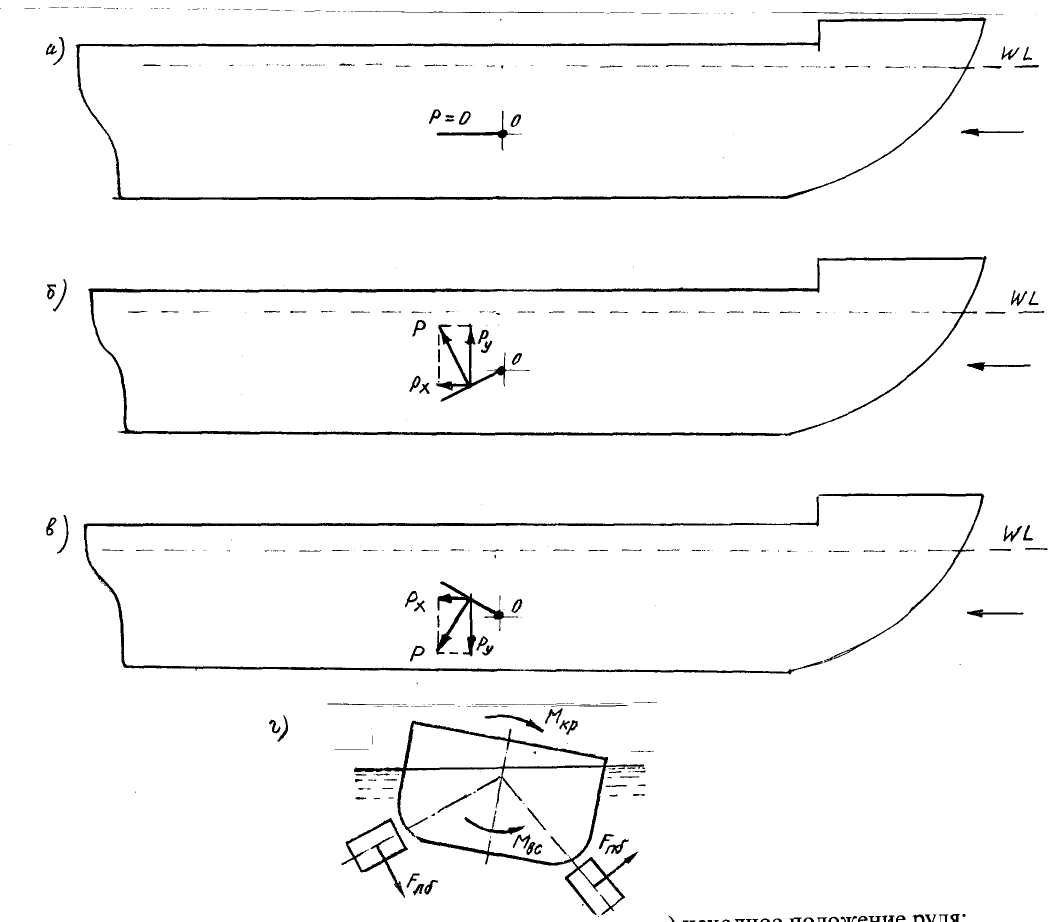
Рис. 10.35. принцип действия успокоителя качки: а ) исходное положение правого руля; б ) руль опущен; в ) руль поднят; г ) схема действия гидродинамических сил на бортовых рулях ( вид со стороны кормы судна )
Поскольку рули расположены с разных бортов, они поворачиваются всегда в противоположные стороны. Например, при крене судна на правый борт руль правого борта надо опустить, а левого – поднять. При этом возникает осстанавливающий момент М  , который направлен навстречу кренящему моменту М
, который направлен навстречу кренящему моменту М  и компенсирует его ( рис. 10.35, г ).
и компенсирует его ( рис. 10.35, г ).
Рули – выдвижные, они располагаются в корпусных нишах. Если качки нет, рули утоплены в нишах. При появлении качки рули выдвигаются из ниш.
Для поворота и выдвижения ( уборки ) рулей служат гидравлические приводы, устроенные подобно приводу гидравлической рулевой машины. Масло в гидроцилиндры нагнетается при помощи насосов переменной подачи.
Дата: 2019-02-02, просмотров: 804.