Напомним, что при следящем управления в качестве органа управления используют штурвал поста управления в рулевой рубке.
При повороте штурвала на определенный угол в необходимую сторону ( влево или вправо относительно нулевого положения ) перо руля повернется на такой же ( или пропорциональный ) угол и автоматически остановится.
Иначе говоря, перо руля повторяет поворот штурвала, как бы следит за движением штурвала, отсюда название – следящее управление.
При этом угол поворота пера руля тем больше, чем больше угловое расстояние ( угловой путь ) , описанное штурвалом, отсюда второе название – управление по пути.
Из сказанного следует, что у каждому положению штурвала после отработки соответствует определенное положение руля.
Таким образом, следящее управление является полуавтоматическим – на первом этапе управления участвует человек ( поворачивает вручную штурвал ), на втором этапе используются элементы автоматики ( сельсин-датчик руля в румпельном отделении ), обеспечивающие автоматическую ( без участия человека ) остановку руля.
Аксиометр является средством дополнительного контроля положения руля.
Система следящего управления может быть создана путем замыкания входа и выхода разомкнутой системы (рис. 10.16 ) через соответствующие преобразующие устройства.
Внутри следящего контура оказываются последовательно включенными два интегрирующих звена СР и РМ. Такие системы являются структурно неустойчивыми. Для придания устойчивости одно из интегрирующих звеньев должно быть охвачено жесткой обратной связью.
Широко распространены схемы (рис. 10.18 ), где обратной связью охвачены два звена: рулевая машина РМ и насос регулируемой подачи.
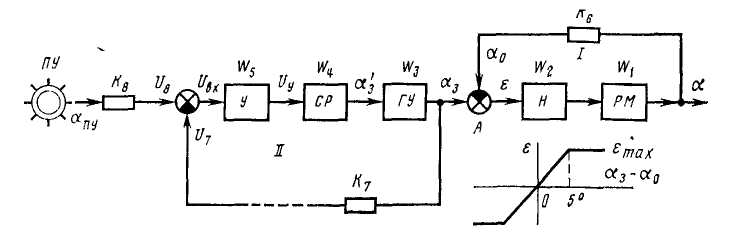
Рис. 10.18. Структурная схема следящего управления РЭГ-приводом с механической обратной связью
Образование внутреннего следящего контура превращает интегрирующее и апериодическое звенья, характерные для гидравлического привода, в обобщенное колебательное звено, передаточная функция которого имеет следующий вид:
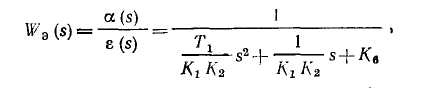
где К  — коэффициент усиления обратной связно масштабно увязывающий воздействие на подачу насоса со стороны руля и со стороны усилителя.
— коэффициент усиления обратной связно масштабно увязывающий воздействие на подачу насоса со стороны руля и со стороны усилителя.
Решение характеристического уравнения, соответствующего данной передаточной функции , показывает, что при соблюдении условия 4 T  K K
K K  K
K  < 1 оба корня уравнения будут отрицательными и вещественными, поэтому движение руля при управления со стороны сервопривода будет носить апериодический характер.
< 1 оба корня уравнения будут отрицательными и вещественными, поэтому движение руля при управления со стороны сервопривода будет носить апериодический характер.
При обратном соотношении в рулевом электроприводе возникают автоколебания, т.е. перо руля даже в отсутствие управляющего сигнала совершает самопроизвольные колебания влево-вправо по отношению к диаметральной плоскости судна.
Для подавления автоколебаний в схему управления рулевым электроприводом вводят отрицательную обратную связь по выходному напряжениию, при помощи которой часть сигнала ( напряжения ) с выхода оконечного каскада усилителя подают в противофазе на вход усилителя.
В результате коэффициент усиления усилителя по напряжению ( а значит, и по мощности ) уменьшается, но достигается главное – исчезают автоколебания пера руля.
При подаче сигнала α  на вход суммирующего устройства А баллер руля повернется на соответствующий угол α.
на вход суммирующего устройства А баллер руля повернется на соответствующий угол α.
Таким образом, задача следящего управления рулем превращается в задачу синфазного поворота поста управления ПУ и выходного органа сервомеханизма (СР, ГУ) α  .
.
Общая схема следящего управления рулем распадается на два независимых замкнутых контура I и II.
Поворот поста управления ПУ на некоторый угол вызывает перемещение выхода сервомеханизма на тот же угол, что в свою очередь определит угол перекладки руля. Элементы К  и К
и К  являются преобразователями углового поворота в эквивалентные электрические сигналы.
являются преобразователями углового поворота в эквивалентные электрические сигналы.
При углах перекладки α = α -а  > 5°, поворот манипулятора насоса ограничивает-
> 5°, поворот манипулятора насоса ограничивает-
ся (ε  ).
).
Движение же задающего органа α может продолжаться из-за наличия специаль-
ной аккумулирующей пружины. Следовательно, при больших углах перекладки насос работает с максимальной подачей и начинает снижать ее за 5° до подхода к заданному положению.
При разомкнутом контуре II возможно простое управление рулем.
Постом управления непосредственно на вход усилителя подается управляющий сигнал. Серводвигатель СР через ГУ или, в случае его отсутствия, через кинематический механизм перемещает на некоторый угол α задающий элемент, угол поворота которого после отработки определит положение руля.
Контроль перекладки производится по двухстрелочному аксиометру заданного и действительного положения руля. Датчики аксиометра связаны соответственно с заданным α и фактическим α углами поворота пера руля. Отключение серводвигателя производится по достижении α требуемого значения.
Рассмотренные решения по обеспечению устойчивости работы системы управления рулевого электропривода (см. рис. 10.18) не являются единственно возможными. За последнее время появились новые структурные схемы управления рулем (АТР, АИСТ), где для обеспечения структурной устойчивости в следящем и автоматическом режимах обратной связью охватывается не рулевая машина, а серводвигатель (рис. 10.19 ).
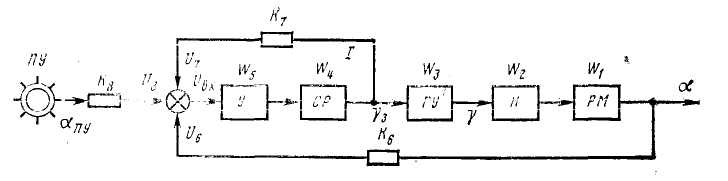
Рис. 10.19. Структурная схема управления РЭГ-приводом с электрической обратной связью
Эти схемы комплектуются аксиально-поршневыми насосами типа IIД. Поворот люльки насоса осуществляется встроенным гидроусилителем, управление которым производится поворотным золотником. Поэтому выход от серводвигателя СР имеет не линейное, а угловое перемещение γ .
Передаточная функция эквивалентного звена внутреннего контура найдется так:

Этой передаточной функции соответствует характеристическое уравнение второго порядка. Вещественные и отрицательные корни этого уравнения определяют условия устойчивости контура и отсутствие колебательных процессов в динамическом режиме.
Численно эти условия выразятся неравенством 4 T  K
K  K
K  K <1.
K <1.
Повышению устойчивости способствует снижение постоянной времени сервопривода. Поэтому в схемах такого рода наиболее широко применяются двухфазные асинхронные электродвигатели с полым ротором, имеющие малый маховой момент.
Увеличение коэффициента усиления усилителя повышает точность обработки, но отрицательно сказывается на устойчивости.
При работе в следящем режиме общий сигнал, подаваемый на вход усилителя, состоит из трех составляющих:
U  = U
= U  - U
- U  - U ,
- U ,
где U - напряжение, пропорциональное повороту α  поста управления;
поста управления;
U - напряжение, пропорциональное перемещению γ золотника гидроусилителя;
U - напряжение, пропорциональное углу α поворота пера руля.
В согласованном положении, когда α = 0, U = 0 (γ = 0, насос не имеет подачи) U = U . При задании перекладки перемещением поста управления равновесие U = U нарушается (например, U > U ).
Люлька насоса поворачивается, появляется напряжение U , которое стремится компенсировать утраченное равновесное состояние.
При малых углах перекладки ( до 5° ) U уравновешивает U , и серводвигатель в этом случае останавливается.
По мере поворота руля происходит увеличение U , так что сумма (U + U ) становится больше U . Серводвигатель изменяет направление вращения. Насос уменьша-
ет подачу. В новом согласованном положении U = 0, равновесие восстанавливается U = = U .
Поворот золотника гидроусилителя γ не превышает 15 - 30°. При учете масштаб-
ных соотношений, принятых в схеме формирования управляющего сигнала U , это соответствует углу поворота руля 5 - 10°.
Поэтому при перекладке на большие углы после выхода насоса на максимальную подачу параметр U сохраняет постоянное значение, соответствующее принятому пре-
дельному повороту золотника γ  .
.
Суммарное напряжение U + U не уравновешивает задающее U и на серводвига-
теле СР образуется положительный управляющий сигнал. Серводвигатель развивает вращающий момент.
В то же время золотник гидроусилителя достиг конечного положения и его дальней
ший поворот невозможен.
Для облегчения теплового режима работы серводвигателя в кинематической связи между ним и золотником предусматривается пружинная муфта проскальзывания .
При подходе к заданному положению ( α = 4 - 5°) серводвигатель останавливается, и в дальнейшем обратным вращением уменьшает подачу насоса от максимальной до нуля, так же как и при перекладке на малые углы.
Дата: 2019-02-02, просмотров: 617.