Самоходные АНО имеют в качестве средства подвижности базовые шасси, которые непосредственно определяют параметры подвижности и боевые возможности РК. Выбор базовых шасси, как правило, осуществляется из числа серийно выпускаемых промышленностью с незначительными доработками.
Выбор базовых шасси осуществляется на основе тактико-технических требований, предъявляемых заказчиками к вооружению.
Современные тенденции развития АНО (рост числа выполняемых функций, увеличение количества и номенклатуры транспортируемых ракет, повышение надежности за счет резервирования элементов и систем и др.) предъявляют повышенные требования к грузоподъемности и полезному объему базового шасси.
Выбор базового шасси осуществляется на основе характеристик транспортируемых ракет и специального оборудования, наиболее важными из которых являются: масса и габаритные размеры, ограничения на допустимые ускорения при движении, частота и скорости колебаний, ограничения на прогиб корпуса и др.
Эти обстоятельства определяют необходимость проведения ряда проверочных расчетов АНО на этапе эскизного проектирования с целью определения соответствия его характеристик предъявляемый требованиям. К таким расчетам можно отнести:
развеску АНО, целью которой является оптимальное распределение веса элементов специальной части по осям АНО;
оценку статической устойчивости АНО;
проверочный тягово-динамический расчет с целью определения ряда параметров подвижности (максимальных скоростей в различных дорожных условиях, углов преодолеваемых подъемов, ускорений и др.);
решение ряда задач динамики движения АНО по дорогам (местности) для оценки динамических нагрузок на элементы АНО, частот колебаний, устойчивости и др.
Решение этих задач тесно связано с уточнением компоновки АНО. По мере получения результатов на различных этапах расчета приходится их многократно уточнять.
Уточнение параметров подвижности АНО с учетом реальной нагрузки базового шасси проводится на основе уравнения движения.
9.2.1. Уравнение движения транспортного средства
При движении на АНО действуют движущие силы и силы сопротивления движению.
Движущей силой АНО является сила реакции поверхности качения на движитель (колесо, гусеницу). Эта сила зависит как от силы, приложенной от двигателя базового шасси, так и от сцепляемости движителя с опорной поверхностью. Поэтому выделяют силу тяги по двигателю Rд и силу тяги по сцеплению Pсц.
Сила тяги по двигателю Pд расходуется на преодоление сил сопротивления движению, к которым относятся (рис. 124). Силы сопротивления качению P ¦ ; подъему P a; воздуха Pв; сила инерции Puн.
Силы P a и Pин могут не только препятствовать движению, но и способствовать ему. Сила Pв, определяемая для неподвижного воздуха, всегда препятствует движению, а с учетом попутного ветра также может изменять направление действия.
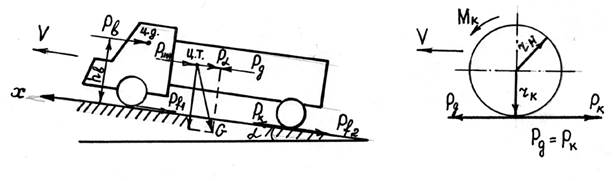
Рис. 124. К выводу уравнения движения АНО
Примем, что все элементы АНО перемещаются в направлении оси x с одинаковой скоростью, вертикальные перемещения отсутствуют, соответствующие элементы двигателя, трансмиссии и колеса совершают вращательное движение. С учетом всех действующих сил уравнение движения или уравнение тягового баланса АНО будет иметь вид
 , (110)
, (110)
 . (111)
. (111)
Соотношение (111) оценивает возможность движения без пробуксовки. Рассмотрим составляющие уравнения движения.
В точках соприкосновения движителя с поверхностью качения возникает окружное усилие Pк (рис. 124), направленное в сторону, противоположную движению. Эта сила вызывает равную ей касательную реакцию поверхности качения Pд, которая и называется силой тяги по двигателю и определяется по выражению:
 (112)
(112)
где Мк - вращающий момент, подведенный к колесу;
rк - радиус качения колеса.
Вращающий момент Мк, подводимый к ведущим колесам с учетом потерь на трение в элементах силовой передачи, можно определить из выражения
 , (113)
, (113)
где Mд – вращающий момент, развиваемый двигателем;
ic – передаточное число силовой передачи;
hc – КПД силовой передачи.
Момент Mд определяется по формуле
 (114)
(114)
где Ne – эффективная мощность, л.с. (кВт);
n – число оборотов вала, об/мин;
wс – угловая скорость вала, рад/с.
Передаточное число силовой передачи определяется по выражению
 (115)
(115)
где  – передаточные числа коробки передач, раздаточной коробки, главной и бортовой передачи соответственно.
– передаточные числа коробки передач, раздаточной коробки, главной и бортовой передачи соответственно.
Радиус качения колеса r к определяется с учетом деформации шин и равен
 , (116)
, (116)
где rн – радиус недеформированной шины;
l - (0,93 - 0,95) – коэффициент деформации шины (может быть найден экспериментально).
Сила Рд с учетом (115-116) равна

В расчетах часто требуется выразить Pд через скорость движения транспортного средства u. Мощность, подводимая к ведущим колесам Nк, находится из выражения

С учетом потерь мощности при передаче ее от двигателя к колесам Nк= Ne × h e , тогда
 ,
,
 (117)
(117)
Графическая зависимость Pд= f ( u ) называется тяговой характеристикой АНО.
Сила тяги по двигателю может быть использована для движения АНО полностью при условии, что между движителем и поверхностью качения имеется достаточное сцепление, исключающее пробуксовку движителя. Сцепные качества движителя с поверхностью качения оцениваются силой тяги по сцеплению Pсц.
Сама по себе сила Pсц не является движущей силой, она лишь обеспечивает создание движущей силы, реализацию силы Pд .
 , (118)
, (118)
где j - коэффициент сцепления;
Gсц – вес, приходящийся на ведущие колеса АНО;
a - угол наклона дороги.
Величина коэффициента j зависит от многих факторов, главными из которых являются материал, конструкция и состояние шин; материал и состояние дорожного покрытия; скорость движения и т.д. Коэффициент j определяется экспериментально. Значения коэффициента j для определенных типов поверхностей качения приведены в таблице 29.
Таблица 29
Средние значения коэффициентов сцепления и
сопротивления качению для колесных АНО
| Типы покрытия дороги | Коэффициент сцепления | Коэффициент сопротивления качению | |
| сухая поверхность | мокрая поверхность | ||
| Бетон | 0,7-0,8 | 0,7-0,8 | 0,015-0,02 |
| Асфальт | 0,5-0,7 | 0,35-0,45 | 0,015-0,02 |
| Гравийно-щебеночная дорога | 0,5-0,7 | 0,3-0,5 | 0,02-0,03 |
| Грунтовая укатанная дорога | 0,5-0,6 | 0,05-0,4 | 0,025-0,035 |
| Песок | 0,5-0,6 | 0,4-0,5 | 0,05-0,3 |
| Снежная укатанная дорога | 0,2-0,4 | - | 0,03-0,5 |
| Лед | 0,05-0,1 | 0,015-0,03 | |
Как следует из выражения (118), увеличить силу Pсц можно за счет увеличения Gсц и коэффициента j. Для увеличения j на ведущие колеса надевают цепи, шпоры, браслеты и т.п. (увеличивается j в 1,3-1,5 раза).
При движении по дороге с твердым покрытием сопротивление качению вызывается, в основном, деформацией шин, поэтому на таких дорогах следует применять шины высокого давления.
При движении по податливому грунту сопротивление качению определяется, главным образом, деформацией грунта. Поэтому на слабых грунтах должны применяться шины низкого и сверхнизкого давления с возможно большей площадью контакта с поверхностью качения.
Сила Pf определяется по формуле
 , (119)
, (119)
где f -коэффициент сопротивления качению;
G - вес транспортного средства.
Коэффициент f определяют опытным путем. Некоторые значения коэффициента f для различных типов дорог приведены в таблице 29.
С и л а с о п р о т и в л е н и я п о д ъ е м у P a возникает при движении на подъемах и уклонах, приложена к центру тяжести. Величина этой силы равна
 . (120)
. (120)
Сумму сил сопротивления качению и подъему называют силой сопротивления дороги  .
.
 , (121)
, (121)
где y = f cosa + sina - коэффициент сопротивления дороги.
Сила  может быть оценена по экспериментальной зависимости
может быть оценена по экспериментальной зависимости
 , (122)
, (122)
где u – скорость движения ТС;
А – площадь АНО в направлении движения;
К – приведенный коэффициент сопротивления воздуха,
(К= 0,055-0,07).
Сила инерции Pин возникает вследствие инертности массы, т.е. свойства ее сохранять состояние покоя или равномерного прямолинейного движения. Инертность препятствует разгону АНО и для ее преодоления необходимы дополнительные затраты энергии. Сила Pин затрачивается на ускорение поступательно движущихся масс агрегата и его вращающихся масс  (маховики двигателя, элементов силовой передачи, колес и др.).
(маховики двигателя, элементов силовой передачи, колес и др.).
Сила инерции поступательно движущихся масс приложена к центру масс АНО и определяется по формуле

где  - масса ТС;
- масса ТС;
j – ускорение поступательного движения.
Сила инерции вращающихся масс пропорциональна их моменту инерции J и угловому ускорению 
Точное определение Pив представляет значительные трудности, поэтому силу инерции вращающихся масс учитывают введением коэффициента b, который находится по приближенной зависимости
где а – коэффициент, принимаемый для колесных машин равным (0,05-0,07).
С учетом вращающихся масс сила Pин определяется выражением
 (123)
(123)
На основе уравнения движения проводится проверочный тягово-динамический расчет АНО.
9.2.2. Проверочный тягово-динамический расчет
агрегата наземного оборудования
Проверочный тягово-динамический расчет проводится с целью определения возможности использования базового шасси в качестве средства подвижности АНО с определенным весом специальной части. Для этого решается уравнение движения и находятся параметры движения АНО: максимальные скорости и ускорения в различных дорожных условиях, углы преодолеваемых подъемов. Далее проверяется соответствие данных параметров требуемым значениям. Наибольшее распространение получил графо-аналитический метод решения уравнения движения при помощи динамической характеристики, предложенный Б.А.Чудаковым.
Динамическим фактором D АНО называют отношение разности силы тяги по двигателю Pд и силы сопротивления воздуха Pв к его весу,
 (124)
(124)
или с учетом (121), (122) и (124)
 (125)
(125)
Выражение (123) связывает динамический фактор с условиями движения.
По физическому смыслу динамический фактор представляет собой удельный силовой запас, приходящийся на единицу веса АНО, что позволяет сравнивать тяговые свойства различных по весу АНО.
Если пренебречь силой Pв, то
 (126)
(126)
Отсюда следует, что динамический фактор увеличивается с увеличением момента Мк, подведенного к колесу, с уменьшением радиуса rк и веса G АНО.
Для решения уравнения движения методом динамической характеристики строят график зависимости динамического фактора ТС с учетом веса специальной части от скорости его движения на различных передачах D = f ( u ) , а используя зависимость динамического фактора от условий движения, определяют параметры движения. Этот график называется динамической характеристикой.
Методика построения графика динамической характеристики включает следующие этапы:
1. Подбор исходных данных G , L , B , H , umax, Nemax, h Nemax, Mg , iкп, iгп, idп, iрк на основе технических характеристик исследуемого базового шасси.
2. Построение графика внешней характеристики двигателя
Ne = f(n), Mg = f(n).
Наиболее показательными в характеристике являются максимальное значение мощности Nemax и соответствующая частота nN .
Для карбюраторного двигателя
 .
.
Для дизелей
 ;
;
3. Вычисляется лобовая площадь A АНО.
4. Строят график D = f( u ) в следующей последовательности:
задаются nx (500, 900,…, nmax);
определяются  на всех передачах (для различных ic);
на всех передачах (для различных ic);
по кинематической схеме трансмиссии определяют h c=0,98n×…0,95m, где n , m - число пар цилиндрических и конических шестерен для определенных передач соответственно;
для соответствующих значений по внешней характеристике определяют Mg;
рассчитывают силу тяги  для соответствующих ux для каждой передачи;
для соответствующих ux для каждой передачи;
определяют  для соответствующих значений u x для каждой передачи;
для соответствующих значений u x для каждой передачи;
строят динамическую характеристику D = f ( u ) для каждой передачи (рис. 125).
Динамическая характеристика позволяет определить: максимальные скорости umax движения АНО, максимальные углы подъема amax , максимальные ускорения jmax при движении по дорогам (местности) с заданными коэффициентами j или f на разных передачах; передачу, на которой может двигаться АНО в конкретных дорожных условиях и т.д.
Рассмотрим использование динамической характеристики на примере определения параметров umax, amax, jmax.
Очевидно, что umax следуют определить на горизонтальном участке дороги (a = 0), когда разгон уже закончен (j =0) и движение равномерное. В этом случае выражение (126) примет следующий вид D = f , т.е. динамический фактор D используется только на преодоление сопротивления качению. Задавшись величиной f и отложив ее на оси D (рис. 125), определяем umax . Для нахождения umax при движении АНО на подъем (a > 0) считают D=y. Порядок определения umax остается таким же, как и в предыдущем случае.
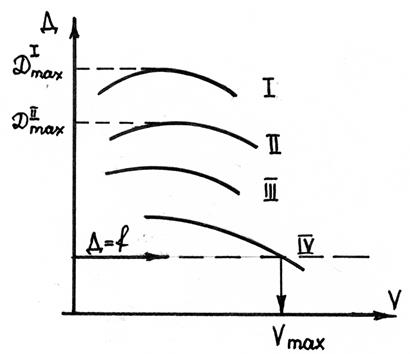
Рис. 125. Определение параметров движения АНО
При малых углах подъема (a < 10°) считают, что cosa =1, тогда при j = 0 динамический фактор имеет вид
Dmax = f +sinamax,
отсюда
amax= arcsin(Dmax- f).
При a >10° уравнение D = fcosa +sina
решают методом последовательных приближений.
Значение jmax находят из выражений
 , при a = 0; (127)
, при a = 0; (127)
 . при a > 0 . (128)
. при a > 0 . (128)
Для определения jmax необходимо вводить в выражения (127), (128) максимальное значение Dmax на данной передаче, найденное по графику.
По динамической характеристике легко решается и задача определения передач, на которых возможно движение АНО в заданных дорожных условиях. Для этого достаточно только установить, какие из кривых динамической характеристики пересекаются прямой D = y или располагаются выше этой прямой. На всех этих передачах и возможно движение АНО.
Проведение проверочного тягово-динамического расчета и определение параметров движения представляют значительные вычислительные трудности. Это обстоятельство определяет необходимость применения ЭВМ.
По приведенным соотношениям можно составить программу расчета, позволяющую производить расчет и построение динамической характеристики АНО, расчет параметров движения на ЭВМ в диалоговом режиме.
Дата: 2019-02-02, просмотров: 715.