ОСНОВЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
СТЕРЖНЕВЫХ СИСТЕМ
Симферополь
2018
Основы строительной механики стержневых систем: [учебное пособие] А.Г. Попов, Э.В. Литвинова, А.С. Маслак. Академия строительства и архитектуры ФГАОУ ВО «Крымский федеральный университет имени В.И. Вернадского». – Симферополь, 2018. – 164 с.
Представлены основы строительной механики стержневых систем, так как в классической строительной механике рассматриваются только стержневые системы. Основными задачами механики инженерных конструкций являются pазpаботка методов для определения прочности, жесткости, устойчивости долговечности конструкций инженерных сооружений и получения данных для их надежного и экономичного пpоектиpования. Выбор и обоснование расчетной схемы – задача чрезвычайно ответственная, сложная, требующая высоких профессиональных навыков, опыта, интуиции, в определенной мере – искусства. Современная строительная механика имеет целый ряд классификаций решаемых задач, которые рассмотрены в учебном пособии.
Данное пособие предназначено для студентов инженерных специальностей, а также может быть использовано аспирантами, преподавателями строительных дисциплин и инженерами
Рецензенты:
Чемодуров В.Т., д.т.н., профессор кафедры Механики и сейсмостойкости сооружений;
Ажермачев С.Г., к.т.н., доцент кафедры Механики и сейсмостойкости сооружений.
Одобрено и рекомендовано к печати Ученым советом АСФ
«_20_» _июня_ 2018 г. Протокол № _11_.
Рассмотрено и одобрено на заседании УМК АСФ
«_10_» _мая_ 2018 г. Протокол № _4_.
Рассмотрено и одобрено на заседании кафедры механики и сейсмостойкости сооружений (МиСС)
«_6_» _мая_ 2018 г. Протокол № _12_.
© М.К., Попов А.Г.,Литвинова Э.В., Маслак А.С., КФУ, 2018
Раздел 3 . Основы строительной механики
стержневых систем.
Глава 1. Стержневые системы, их образование, классификация и анализ. Задачи строительной механики
Элементы стержневых систем.
Стержневые системы являются несущими конструкциями зданий и инженерных сооружений. Они состоят из элементов трех групп: дисков, шарниров и опорных устройств.
Диском в строительной механике называют сплошное или решетчатое тело любой формы, имеющее на плоскости 3 степени свободы, а в пространстве 6 степеней свободы. На рис.1.1 показаны сплошной и решетчатый диски. Простейшим сплошным диском является прямой стержень, показанный на рис.1.2, а простейшим решетчатым диском является шарнирный треугольник, показанный на рис.1.3.
Рис.1.1
Рис.1.2 Рис.1.3
Расчетные схемы дисков, показанных на рис.1.2 и 1.3, изображены на рис.1.4 и 1.5 соответственно.
Рис.1.4 Рис.1.5
Напомним, что расчетной схемой называют упрощенное идеализированное представление реального диска в виде упругой линии, совпадающей с его осью.
Шарниром называют устройство, которое, объединяя два диска, допускает свободный их поворот вокруг своего центра или оси. В пространственных стержневых системах используют шаровые или сферические шарниры, а в плоских стержневых системах – цилиндрические. Шарнир, объединяющий между собой два диска, является простым.
Простой сферический шарнир накладывает на два объединяемых диска в пространстве три связи, т.е. он отбирает у дисков три степени свободы, препятствуя объединяемым точкам дисков свободно перемещаться в трех взаимно перпендикулярным направлениям.
Простой цилиндрический шарнир накладывает на два объединяемых диска на плоскости две связи, т.е. он отбирает у дисков две степени свободы, препятствуя объединяемым точкам дисков свободно перемещаться в двух взаимно перпендикулярным направлениям.
Шарниры, объединяющие в одной точке три или более трех дисков, являются кратными, т.е. эквивалентными нескольким простым шарнирам. Кратность шарнира определяется по формуле:
 (1.1)
(1.1)
Где: D – число дисков, объединенных кратным шарниром в одной точке.
В полном соответствии с числом и направлениями перемещений, которым препятствуют шарниры, находится число и характер сил сопротивления, передаваемых шарниром от одного объединяемого диска к другому.
На рис. 1.6 показана расчетная схема цилиндрического шарнира, объединяющего два диска на плоскости. Этот шарнир препятствует взаимным вертикальным и горизонтальным перемещениям объединяемых точек дисков и передает (в соответствии с этим) от одного диска к другому вертикальные и горизонтальные силы сопротивления. Если шарнир незагружен, то указанные силы равны по величине и противоположно направлены. Если же шарнир загружен вертикальной силой, то вертикальные составляющие будут отличаться на величину этой силы.
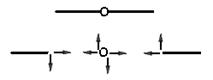
Рис1.6
Опорные устройства обеспечивают неподвижность стержней и стержневых систем на плоскости или в пространстве.
В стержневых системах используют три основных вида опорных устройств: жесткая заделка (защемляющая опора), шарнирно неподвижная и шарнирно подвижная опоры.
Расчетные схемы указанных опор плоской стержневой системы показаны на рис.1.7.
Рис.1.7
Защемляющая опора плоской стержневой системы имеет три опорные связи. Она препятствует повороту диска вокруг оси перпендикулярной к его плоскости, а также вертикальному и горизонтальному перемещениям. В соответствии с этим в такой опоре возникают три составляющие реакции: опорный момент, вертикальная и горизонтальная реактивные силы, показанные на рис.1.8,а.
Шарнирно неподвижная опора препятствует свободному перемещению диска в двух взаимно перпендикулярным направлениям и в ней возникают две составляющие реактивные силы – вертикальная и горизонтальная (рис.1.8,б).
Шарнирно подвижная опора препятствует свободному перемещению диска в одном направлении (в направлении опорного стержня) и в ней возникает только одна реакция, направленная вдоль оси опорного стержня (рис.1.8,в).
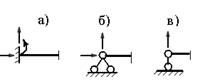
Рис.1.8
Примечания: 1. Защемляющая опора пространственных стержневых систем имеет шесть опорных связей. Она препятствует их свободным перемещениям в трех взаимно перпендикулярным направлениях и свободным поворотам относительно трех взаимно перпендикулярных осей координат. В соответствии с этим в ней возникают три сосредоточенные реактивные силы, направленные вдоль координатных осей и три реактивные моменты относительно тех же осей.
2. Шарнирно неподвижная опора пространственных систем обладает тремя связями, препятствующими свободным перемещениям системы в трех взаимно перпендикулярным направлениях. В такой опоре возникают три сосредоточенные реактивные силы, направленные вдоль координатных осей.
3. Шарнирно подвижная опора имеет одну или две опорные связи, в которых возникают реактивные сосредоточенные силы.
1.2 Варианты образования стержневых
систем.
Все стержневые системы образуются из элементов трех групп, рассмотренных в предыдущем параграфе, по двум вариантам:
В первом варианте за несущие загруженные элементы принимаются диски, а шарниры осуществляют связи между ними и как правило являются незагруженными. Опорные устройства, обеспечивающие неподвижность систем выбираются конструктивно в зависимости от назначения стержневой системы.
По первому варианту образуются сплошные стержневые системы (многопролетные балки, трехшарнирые и многошарнирные арки и рамы). На рис.1.9 изображена многопролетная балка, на рис.1.10 - трехшарнирная арка, а на рис.1.11 -двухпролетная одноэтажная рама. Эти системы образованы по первому варианту.

Рис.1.9
Рис.1.10
Рис.1.11
Во втором варианте за несущие загруженные элементы принимаются шарниры (узлы), а незагруженные диски осуществляют связи между ними и называются стержнями. Опорные устройства, обеспечивающие неподвижность систем выбираются таким же образом, как и в первом варианте.
По второму варианту образуются решетчатые стержневые системы (плоские и пространственные фермы). На рис.1,12 показана плоская балочная ферма с параллельными поясами и раскосной решеткой.
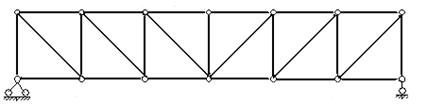
Рис.1.12
В последующих главах настоящего учебного пособия будут рассмотрены другие стержневые системы, которые образуются по двум вариантам.
Дата: 2019-02-02, просмотров: 372.