МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
ФГАОУ ВО «Крымский федеральный университет
Имени В.И. Вернадского»
Академия строительства и архитектуры
Кафедра механики и сейсмостойкости сооружений
А.Г. Попов, Э.В. Литвинова, А.С. Маслак
ОСНОВЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
СТЕРЖНЕВЫХ СИСТЕМ
Симферополь
2018
Основы строительной механики стержневых систем: [учебное пособие] А.Г. Попов, Э.В. Литвинова, А.С. Маслак. Академия строительства и архитектуры ФГАОУ ВО «Крымский федеральный университет имени В.И. Вернадского». – Симферополь, 2018. – 164 с.
Представлены основы строительной механики стержневых систем, так как в классической строительной механике рассматриваются только стержневые системы. Основными задачами механики инженерных конструкций являются pазpаботка методов для определения прочности, жесткости, устойчивости долговечности конструкций инженерных сооружений и получения данных для их надежного и экономичного пpоектиpования. Выбор и обоснование расчетной схемы – задача чрезвычайно ответственная, сложная, требующая высоких профессиональных навыков, опыта, интуиции, в определенной мере – искусства. Современная строительная механика имеет целый ряд классификаций решаемых задач, которые рассмотрены в учебном пособии.
Данное пособие предназначено для студентов инженерных специальностей, а также может быть использовано аспирантами, преподавателями строительных дисциплин и инженерами
Рецензенты:
Чемодуров В.Т., д.т.н., профессор кафедры Механики и сейсмостойкости сооружений;
Ажермачев С.Г., к.т.н., доцент кафедры Механики и сейсмостойкости сооружений.
Одобрено и рекомендовано к печати Ученым советом АСФ
«_20_» _июня_ 2018 г. Протокол № _11_.
Рассмотрено и одобрено на заседании УМК АСФ
«_10_» _мая_ 2018 г. Протокол № _4_.
Рассмотрено и одобрено на заседании кафедры механики и сейсмостойкости сооружений (МиСС)
«_6_» _мая_ 2018 г. Протокол № _12_.
© М.К., Попов А.Г.,Литвинова Э.В., Маслак А.С., КФУ, 2018
Раздел 3 . Основы строительной механики
стержневых систем.
Глава 1. Стержневые системы, их образование, классификация и анализ. Задачи строительной механики
Элементы стержневых систем.
Стержневые системы являются несущими конструкциями зданий и инженерных сооружений. Они состоят из элементов трех групп: дисков, шарниров и опорных устройств.
Диском в строительной механике называют сплошное или решетчатое тело любой формы, имеющее на плоскости 3 степени свободы, а в пространстве 6 степеней свободы. На рис.1.1 показаны сплошной и решетчатый диски. Простейшим сплошным диском является прямой стержень, показанный на рис.1.2, а простейшим решетчатым диском является шарнирный треугольник, показанный на рис.1.3.
Рис.1.1
Рис.1.2 Рис.1.3
Расчетные схемы дисков, показанных на рис.1.2 и 1.3, изображены на рис.1.4 и 1.5 соответственно.
Рис.1.4 Рис.1.5
Напомним, что расчетной схемой называют упрощенное идеализированное представление реального диска в виде упругой линии, совпадающей с его осью.
Шарниром называют устройство, которое, объединяя два диска, допускает свободный их поворот вокруг своего центра или оси. В пространственных стержневых системах используют шаровые или сферические шарниры, а в плоских стержневых системах – цилиндрические. Шарнир, объединяющий между собой два диска, является простым.
Простой сферический шарнир накладывает на два объединяемых диска в пространстве три связи, т.е. он отбирает у дисков три степени свободы, препятствуя объединяемым точкам дисков свободно перемещаться в трех взаимно перпендикулярным направлениям.
Простой цилиндрический шарнир накладывает на два объединяемых диска на плоскости две связи, т.е. он отбирает у дисков две степени свободы, препятствуя объединяемым точкам дисков свободно перемещаться в двух взаимно перпендикулярным направлениям.
Шарниры, объединяющие в одной точке три или более трех дисков, являются кратными, т.е. эквивалентными нескольким простым шарнирам. Кратность шарнира определяется по формуле:
 (1.1)
(1.1)
Где: D – число дисков, объединенных кратным шарниром в одной точке.
В полном соответствии с числом и направлениями перемещений, которым препятствуют шарниры, находится число и характер сил сопротивления, передаваемых шарниром от одного объединяемого диска к другому.
На рис. 1.6 показана расчетная схема цилиндрического шарнира, объединяющего два диска на плоскости. Этот шарнир препятствует взаимным вертикальным и горизонтальным перемещениям объединяемых точек дисков и передает (в соответствии с этим) от одного диска к другому вертикальные и горизонтальные силы сопротивления. Если шарнир незагружен, то указанные силы равны по величине и противоположно направлены. Если же шарнир загружен вертикальной силой, то вертикальные составляющие будут отличаться на величину этой силы.
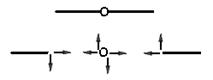
Рис1.6
Опорные устройства обеспечивают неподвижность стержней и стержневых систем на плоскости или в пространстве.
В стержневых системах используют три основных вида опорных устройств: жесткая заделка (защемляющая опора), шарнирно неподвижная и шарнирно подвижная опоры.
Расчетные схемы указанных опор плоской стержневой системы показаны на рис.1.7.
Рис.1.7
Защемляющая опора плоской стержневой системы имеет три опорные связи. Она препятствует повороту диска вокруг оси перпендикулярной к его плоскости, а также вертикальному и горизонтальному перемещениям. В соответствии с этим в такой опоре возникают три составляющие реакции: опорный момент, вертикальная и горизонтальная реактивные силы, показанные на рис.1.8,а.
Шарнирно неподвижная опора препятствует свободному перемещению диска в двух взаимно перпендикулярным направлениям и в ней возникают две составляющие реактивные силы – вертикальная и горизонтальная (рис.1.8,б).
Шарнирно подвижная опора препятствует свободному перемещению диска в одном направлении (в направлении опорного стержня) и в ней возникает только одна реакция, направленная вдоль оси опорного стержня (рис.1.8,в).
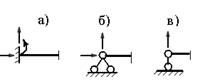
Рис.1.8
Примечания: 1. Защемляющая опора пространственных стержневых систем имеет шесть опорных связей. Она препятствует их свободным перемещениям в трех взаимно перпендикулярным направлениях и свободным поворотам относительно трех взаимно перпендикулярных осей координат. В соответствии с этим в ней возникают три сосредоточенные реактивные силы, направленные вдоль координатных осей и три реактивные моменты относительно тех же осей.
2. Шарнирно неподвижная опора пространственных систем обладает тремя связями, препятствующими свободным перемещениям системы в трех взаимно перпендикулярным направлениях. В такой опоре возникают три сосредоточенные реактивные силы, направленные вдоль координатных осей.
3. Шарнирно подвижная опора имеет одну или две опорные связи, в которых возникают реактивные сосредоточенные силы.
1.2 Варианты образования стержневых
систем.
Все стержневые системы образуются из элементов трех групп, рассмотренных в предыдущем параграфе, по двум вариантам:
В первом варианте за несущие загруженные элементы принимаются диски, а шарниры осуществляют связи между ними и как правило являются незагруженными. Опорные устройства, обеспечивающие неподвижность систем выбираются конструктивно в зависимости от назначения стержневой системы.
По первому варианту образуются сплошные стержневые системы (многопролетные балки, трехшарнирые и многошарнирные арки и рамы). На рис.1.9 изображена многопролетная балка, на рис.1.10 - трехшарнирная арка, а на рис.1.11 -двухпролетная одноэтажная рама. Эти системы образованы по первому варианту.

Рис.1.9
Рис.1.10
Рис.1.11
Во втором варианте за несущие загруженные элементы принимаются шарниры (узлы), а незагруженные диски осуществляют связи между ними и называются стержнями. Опорные устройства, обеспечивающие неподвижность систем выбираются таким же образом, как и в первом варианте.
По второму варианту образуются решетчатые стержневые системы (плоские и пространственные фермы). На рис.1,12 показана плоская балочная ферма с параллельными поясами и раскосной решеткой.
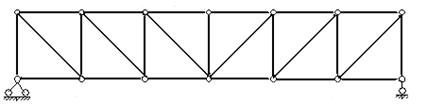
Рис.1.12
В последующих главах настоящего учебного пособия будут рассмотрены другие стержневые системы, которые образуются по двум вариантам.
Вопросы для самоконтроля полученных знаний.
1. Что такое строительная механика и в чем ее отличие от сопротивления материалов и других смежных дисциплин?
2. Что характерно для развития строительной механики на современном этапе?
3. Какова задача строительной механики и в чем ее важность?
4. Что такое расчетная схема сооружения? Какими соображениями руководствуются при ее выборе?
5. Из каких элементов может быть составлено сооружение?
6. Как соединяются между собой отдельные стержни плоского сооружения?
7. Как различаются сооружения в зависимости от способов соединения стержней?
8. Что такое кратный шарнир?
9. Назовите виды опор плоских сооружений. Каковы их кинематические и статические свойства?
10. Приведите классификацию нагрузок. Какие другие воздействия может испытывать сооружение?
11. Что называют числом степеней свободы сооружения?
12. Как определить количество связей в соединении дисков или в опоре?
13. Как геометрическая неизменяемость сооружения связана с числом степеней свободы?
14. Какая система называется статически определимой?
15. Как статическая определимость сооружения связана с числом степеней свободы?
16. В каком случае и почему для проверки геометрической неизменяемости сооружения необходимо выполнить анализ его геометрической структуры
17. Перечислите основные способы образования геометрически неизменяемых систем.
18. Какие системы называют мгновение изменяемыми?
19. Почему мгновенно изменяемые системы не применяют в сооружениях?
20. Каковы статические признаки мгновенной изменяемости сооружения?
21. Какие допущения о свойствах материалов принимают в строительной механике?
22. Какие системы называют линейно деформируемыми? Каковы следствия допущения о линейной деформируемости системы?
23. В каком случае можно выполнять расчет сооружения по недеформируемой схеме?
Поперечная сила и изгибающий момент в начале крайнего левого участка всегда известны по условиям закрепления и загружения балки. Они равняются соответственно сосредоточенной силе и сосредоточенному моменту в этом сечении с соответствующими знаками.
2 ) Поперечная сила в конечном сечении произвольного участка  равняется алгебраической сумме поперечной силы в начальном сечении этого участка
равняется алгебраической сумме поперечной силы в начальном сечении этого участка  и площади распределенной нагрузки в пределах этого участка.
и площади распределенной нагрузки в пределах этого участка.
Или:  (2.7)
(2.7)
Произведение q·a n равняется площади распределенной нагрузки в пределах участка.
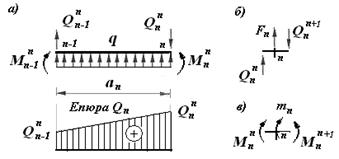
Рис.2.10
Распределенная нагрузка принимается со знаком плюс, если действует вверх и со знаком минус, если действует вниз. На рис.2.10 показаны направления нагрузок и усилий, имеющих знак плюс.
3) Поперечная сила в начальном сечении любого последующего участка  равняется алгебраической сумме поперечной силы в конечном сечении предыдущего участка и сосредоточенной силы F n, которая действует на границе этих участков.
равняется алгебраической сумме поперечной силы в конечном сечении предыдущего участка и сосредоточенной силы F n, которая действует на границе этих участков.
Или:  (2.8)
(2.8)
Если на границе двух участков отсутствует сосредоточенная сила, то поперечные силы в конечном сечении предыдущего участка и в начальном сечении последующего участка имеет одинаковое значение, то есть  .
.
4) Изгибающий момент в конечном сечении произвольного участка  равняется алгебраической сумме изгибающего момента в начальном сечении этого участка
равняется алгебраической сумме изгибающего момента в начальном сечении этого участка  и площади э пюры поперечных сил в пределах этого участка.
и площади э пюры поперечных сил в пределах этого участка.
Или:  (2.9)
(2.9)
5) Изгибающий момент в начальном сечении любого последующего участка  равняется алгебраической сумме изгибающего момента в конечном сечении предыдущего участка,
равняется алгебраической сумме изгибающего момента в конечном сечении предыдущего участка,  и сосредоточенного момента, который действует на границе этих участков.
и сосредоточенного момента, который действует на границе этих участков.
Или:  (2.10)
(2.10)
Если на границе двух участков отсутствует внешний сосредоточенный момент, то изгибающие моменты в конечном сечении предыдущего участка и в начальном сечении последующего участка имеет одинаковое значение, то есть  .
.
Пример 2.1. Последовательность построения эпюр поперечных сил и изгибающих моментов методом площадей проследим на примере балки, размеры и нагрузки которой показаны на рис.2.7,а.
Трехшарнирные рамы.
Трехшарнирные рамы отличаются от трехшарнирных арок тем, что их диски являются прямолинейными на отдельных участках. На рис.4.4 представлена наиболее применяемая трехшарнирная рама. Вертикальные стержни рамы называются стойками, а горизонтальные – ригелями. Стойки объединяются жестко с ригелями в узлах 1 и 2, образуя Г – образные диски (полурамы). Эти диски объединяются между собой ключевым шарниром С и закрепляются при помощи шарнирно неподвижных опор А и В.
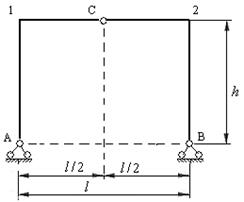
Рис.4.4
Опоры трехшарнирных рам могут располагаться в разных уровнях (рис.4.5).
Рис.4.5
При строительстве инженерных сооружений могут быть использованы рамы с наклонными стойками и горизонтальным ригелем, а также рамы с вертикальными стойками и наклонными ригелями (рис.4.6 и 4.7).
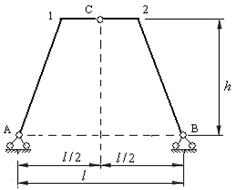
Рис.4.6
Рис.4.7
4.3 Аналитический метод определения реакций опор трехшарнирной арки.
Рассмотрим трехшарнирную арку, загруженную системой вертикальных сосредоточенных сил  ,
,  ,…
,…  (рис.4.8,а) и однопролетную балку на двух шарнирных опорах, имеющую тот же пролет и загруженную теми же нагрузками, что и арка (рис.4.8,б).
(рис.4.8,а) и однопролетную балку на двух шарнирных опорах, имеющую тот же пролет и загруженную теми же нагрузками, что и арка (рис.4.8,б).
Рис.4,8
Обе опоры трехшарнирной арки шарнирно неподвижные и в них возникают по две составляющие реакций: вертикальные и горизонтальные. Обозначим вертикальные составляющие буквами  и
и  , а горизонтальные составляющие буквами
, а горизонтальные составляющие буквами  и
и  .
.
В опорах балки при вертикальных нагрузках возникают только вертикальные реакции,  и
и  . Определим сначала вертикальные реакции опор балки из условий её равновесия относительно опорных шарниров:
. Определим сначала вертикальные реакции опор балки из условий её равновесия относительно опорных шарниров:


 ,
,
Откуда  (4.7)
(4.7)

 ,
,
Откуда  (4.8)
(4.8)
Определим внутренние усилия в сечении С балки, расположенном под ключевым шарниром арки. Эти усилия будем называть балочными усилиями, т.е балочной поперечной силой в сечении балки под ключевым шарниром арки:
 (4.9)
(4.9)
и балочным изгибающим моментом в том же сечении:
 (4.10)
(4.10)
Перейдем к определению реакций опор трехшарнирной арки.
Для определения четырех неизвестных реакций опор арки, показанных на рис.4.8,а необходимо составить четыре уравнения. Три из них составляем из условий равновесия арки в целом, а четвертое – из условия равновесия одной полуарки по отношению к другой. Такое равновесие возможно, если изгибающий момент в ключевом шарнире арки равен нулю. Запишем условия равновесия, составим уравнения равновесия и найдем все составляющие реакций опор арки из их решения:
1) 


 (1.11)
(1.11)
Из равенства (1.11) следует, что при загружении арки вертикальными нагрузками горизонтальные составляющие реакций опор равны по модулю и противоположно направлены внутрь пролета арки. Они называются распором арки. Эти силы удерживают опоры арки на заданном расстоянии.
2) 
 ,
,
Откуда  (4.12)
(4.12)
3)  ,
,
Откуда  (4.13)
(4.13)
Сопоставляя выражения (4.7) с (4.12) и (4.8) с (4.13) легко заметить, что вертикальные составляющие реакций опор арки и балки одинаковы, если балка имеет тот же пролет и несет те же нагрузки, что и арка.
4) 
 (4.14)
(4.14)
Учитывая, что  , а
, а  и используя выражение (4.10), равенство (4.14) приведем к виду:
и используя выражение (4.10), равенство (4.14) приведем к виду:
 , откуда
, откуда
 (4.15)
(4.15)
Таким образом, распор арки равен отношению балочного изгибающего момента в сечении, взятом под ключевым шарниром арки к стреле подъема арки.
4.4 Аналитический метод определения внутренних усилий в сечениях трехшарнирной арки.
Рассмотрим трехшарнирную арку, загруженную вертикальными силами (рис.4.9,а), а также балку на двух шарнирных опорах, имеющую тот же пролет и загруженную теми же силами, что и арка (рис.4.9,б). Реакции опор и распор арки определяем по формулам (4.12), (4.13) и (4.15).
Проведем нормальные сечения  арки и балки с абсциссой
арки и балки с абсциссой  . В сечении арки проведем касательную к оси и обозначим угол её наклона к горизонтальной прямой, через
. В сечении арки проведем касательную к оси и обозначим угол её наклона к горизонтальной прямой, через  . Ордината сечения арки
. Ордината сечения арки  определяется из уравнения очертания оси арки, а тангенс угла из производной от этого уравнения по абсциссе
определяется из уравнения очертания оси арки, а тангенс угла из производной от этого уравнения по абсциссе  .
.
Рис.4.9
Отбросим правые отсеченные части арки и балки, а их действие на левые части, заменим внутренними усилиями в сечении. В сечении балки действуют две составляющие: поперечная сила  и изгибающий момент
и изгибающий момент  (рис.4.10,б), а в сечении арки действуют три составляющие внутренних усилий: поперечная сила
(рис.4.10,б), а в сечении арки действуют три составляющие внутренних усилий: поперечная сила  , продольная сила
, продольная сила  и изгибающий момент
и изгибающий момент  (рис.4.10,а). На рис.4.10 показаны направления усилий, соответствующие их положительным знакам.
(рис.4.10,а). На рис.4.10 показаны направления усилий, соответствующие их положительным знакам.
Определим балочные усилия в сечении  , используя два условия равновесия левой отсеченной части балки (рис.4.10,б):
, используя два условия равновесия левой отсеченной части балки (рис.4.10,б):

 откуда
откуда  (4.16)
(4.16)

 , откуда:
, откуда:
 (4.17)
(4.17)
Рис.4.10
Определим арочные усилия в сечении , используя три условия равновесия левой отсеченной части арки (рис.4.10,а):


 , откуда:
, откуда:
 (4.18)
(4.18)
Итак, изгибающий момент в произвольном сечении трехшарнирной арки равен разности между балочным изгибающим моментом в соответствующем сечении и произведением распора арки на ординату её оси в заданном сечении.
Изгибающий момент принимается со знаком плюс, если он растягивает нижние волокна арки, т.е. если он стремится повернуть левую отсеченную часть против часовой стрелки, а правую отсеченную часть по часовой стрелке. При противоположных направлениях действия, изгибающий момент принимается со знаком минус.
Из формулы (4.18) следует, что изгибающий момент в любом сечении арки имеет значительно меньшее значение, чем балочный изгибающий момент.


Откуда:  (4.19)
(4.19)
Итак, поперечная сила в произвольном сечении арки равна разности произведений балочной поперечной силы на косинус угла наклона касательной и распора арки на синус того же угла.
Поперечная сила в сечении принимается со знаком плюс, если она стремится повернуть любую отсеченную часть арки по часовой стрелке и со знаком минус, если она стремится повернуть любую часть арки против часовой стрелки.


Откуда  (4.20)
(4.20)
Элементы ферм.
Фермой называется решетчатая стержневая система, образованная из шарнирных узлов, объединенных между собой прямолинейными стержнями. Фермы загружают в узлах сосредоточенными силами, от действия которых возникают реакции опор и продольные усилия в стержнях. Силовой расчет фермы состоит в определении этих усилий.
Следует иметь в виду, что реальные фермы имеют жесткие узлы и являются статически неопределимыми. При замене жестких узлов шарнирными узлами , величины усилий в стержнях практически не меняются, но расчет значительно упрощается.
На рис.5.1 показана ферма, на примере которой установим элементы ферм. Эта ферма состоит из 10 шарнирных узлов (У=10), 17 стержней, объединяющих узлы (С=17) и двух шарнирных опор, одна из которых неподвижная. Число опорных связей равно 3 (С0=3). Узлы А и В называют опорными. Расстояние между опорными узлами является длиной пролета фермы. Расстояние между соседними узлами по
Рис.5.1
горизонтали называется длиной панели и обозначается буквой d. Расстояние между соседними узлами по вертикали называется высотой фермы и обозначается буквой h.
Стержни, ограничивающие ферму сверху, образуют верхний пояс и называются стержнями верхнего пояса.
Стержни, ограничивающие ферму снизу, образуют нижний пояс и называются стержнями нижнего пояса.
Остальные стержни образуют решетку фермы. При этом вертикальные стержни называют стойками, а наклонные – раскосами. Раскосы могут быть восходящими и нисходящими. Характер раскосов устанавливают в зависимости от их наклона, если рассматривать ферму от опор к середине. В приведенной на рис.5.1 ферме раскосы 1-6 и 5-8 являются нисходящими, а раскосы 3-6 и 3-8 восходящими. В нисходящих раскосах возникают растягивающие усилия, а в восходящих раскосах возникают сжимающие усилия.
Напомним, что фермы образуются по второму варианту и они должны удовлетворять условию неподвижности на плоскости:
2У – С – С0 = 0
Проверим, выполняется ли это условие для фермы, представленной на рис.5.1.
2∙10 – 17 – 3 =0 , 0 = 0.
Классификация ферм.
Плоские фермы классифицируют по следующим признакам:
1) По назначению фермы бывают: а) мостовыми;
б) крановыми; в) башенного типа; г) фермы покрытий промышленных зданий.
2) По характеру и расположению опор фермы бывают: а) балочными; б) арочными; в) балочно-консольными (однопролетными и многопролетными).
Ферма, представленная на рис.5.1 является балочной. Она будет однопролетной балочно-консольной, если опору А установить в узел 6, или опору В установить в узел 8.
На рис.5.2 изображена арочная ферма, а на рис.5.3 двухпролетная балочно-консольная ферма.
Рис.5,2
Рис.5.3
3) По очертанию поясов фермы бывают: а) с параллельными поясами (рис.5.1); б) двухскатными (рис.5.4);
в) с наклонным верхним поясом (рис.5.5); г) с приподнятым (спарушеным) нижним поясом (рис.5.6); д) стропильными (рис.5.7).
Рис.5.4
Рис.5.5
Рис.5.6
Рис.5.7
4) По структуре решетки фермы бывают: а) с треугольной решеткой (рис.5.8); б), с раскосной решеткой (рис.5.1); в) с полураскосной решеткой (рис.5.9); шпренгельными (рис.5.10).

Рис.5.8
Рис.5.9
Рис.5.10
5) По месту приложения нагрузки следует различать фермы: а) с загруженным верхним поясом; б) с загруженным нижним поясом; в) с комбинированным загружением обоих поясов. При этом необходимо помнить, что все нагрузки приводятся к сосредоточенным силам, приложенным в узлах ферм.
Примеры расчета статически неопределимых рам методом сил
Пример 7.1: для рамы с заданными размерами и нагрузками (рис.2) требуется:
а) построить эпюры изгибающих моментов, поперечных и продольных сил;
б) проверить правильность построенных эпюр.
Рис.7.7
Последовательность решение задачи:
1) Устанавливаем степень статической неопределимости рамы по формуле:  . Для заданной рамы имеем:
. Для заданной рамы имеем:  , тогда
, тогда  , т.е. рама три раза статически неопределима.
, т.е. рама три раза статически неопределима.
2) Выбираем основную систему метода сил путем освобождения трех лишних связей. За лишние связи можно принимать любые связи заданной рамы при условии, что после их освобождения (удаления) основная система будет статически определимой и неподвижной на плоскости.
Для любой статически неопределимой рамы можно образовать несколько вариантов основной системы. Чем выше степень статической неопределимости рамы, тем больше вариантов основной системы возможно предложить. На рисунках 7.8,а; 7.8,б; 7.8,в; 7.8,г показаны четыре варианта основной системы, которые могут быть приняты при расчете заданной рамы методом сил.
Рис.7.8,а Рис.7.8,б
Первый вариант основной системы (рис.7.8,а) образуем рассечением ригеля второго этажа заданной рамы (рассечь ригель можно в любом месте, как посредине пролета, так и вблизи одного из жестких узлов). Рассекая стержень на две части, освобождаем три связи:
- связь, препятствующую взаимному горизонтальному перемещению разъединенных частей стержня;
- связь, препятствующую взаимному вертикальному перемещению разъединенных частей стержня;
- связь, препятствующую взаимному повороту торцов, проведенного поперечного сечения стержня.
Рис.7.8.в Рис.7.8,г
Второй вариант основной системы (рис.7.8,б) выбираем путем удаления связей шарнира С заданной рамы (шарнир имеет две связи) и одной опорной связи на горизонтальное перемещение.
Третий вариант основной системы (рис.7.8,в) образуем введением трех цилиндрических шарниров в сечения ригеля и стоек второго этажа заданной рамы. Напомним, что введением шарнира в произвольное сечение стержня освобождается одна связь на взаимное угловое перемещение поперечных сечений, объединяемых шарниром.
Четвертый вариант основной системы (рис.7.8,г) образуем освобождением двух связей шарнира С и введение шарнира в среднее сечение ригеля второго этажа заданной рамы.
Примечание: при образовании основной системы вводить шарниры или рассекать стержни можно в произвольных местах. Однако, если заданная рама имеет ось геометрической и жесткостной симметрий, то упрощение расчета будет достигнуто при выборе симметричной основной системы. Все четыре варианта основной системы выбраны симметричными относительно вертикальной оси, проходящей через шарнир С заданной рамы.
Рис.7.9
Принимаем для расчета рамы первый вариант основной системы (рис.7.8,а).
3) Образуем эквивалентную систему. Для этого основную систему загружаем заданными нагрузками и неизвестными усилиями  ,
,  и
и  , которые компенсируют действие на раму освобожденных связей в поперечном сечении ригеля второго этажа (рис.7.9).
, которые компенсируют действие на раму освобожденных связей в поперечном сечении ригеля второго этажа (рис.7.9).
4) Записываем систему канонических уравнений метода сил:

 (7.19)
(7.19)

5) Строим единичные эпюры, а также грузовую эпюру изгибающих моментов в основной системе метода сил (рис.7.10,7.11, 7.12 и 7.13).
Для построения эпюр изгибающих моментов необходимо:
- определить реакции опор (величины и направления этих реакций от каждого вида нагрузки определяются из условий равновесия рамы в целом и отдельных дисков);
- вычислить изгибающие моменты в характерных сечениях каждого стержня;
- отложить их от оси каждого стержня в сторону растянутой зоны и соединить прямыми или кривыми линиями.
На рисунках 7.10-7.13 показаны направления и величины реакций опор и построены единичные эпюры и грузовая эпюра изгибающих моментов. Предлагаем изучающим курс составить необходимые уравнения равновесия и проверить найденные значения реакций и их направления.
Рис.7.10 Рис.7.11
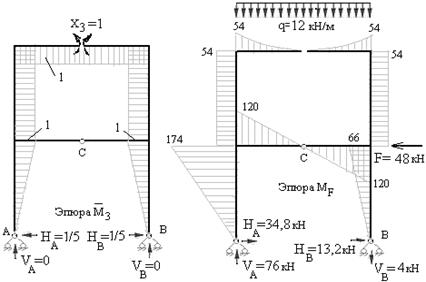
Рис.7.12 Рис.7.13
6) Определяем коэффициенты и грузовые перемещения канонических уравнений метода сил, пользуясь правилом Верещагина. Напомним, что перемножение эпюр изгибающих моментов осуществляется на каждом участке рамы, в пределах которого одна из двух перемножаемых эпюр прямолинейна, а вторая может иметь произвольное очертание и может быть разделена на части, площади и положения центров тяжести которых, легко определяются.
Единичные эпюры изгибающих моментов всегда имеют прямолинейное очертание в пределах отдельных стержней рамы. Поэтому коэффициенты канонических уравнений легко вычисляются по правилу Верещагина.
Вычислим, к примеру, коэффициент δ11. Для этого необходимо перемножить эпюру  саму на себя, т.е. на каждом участке вычислить площадь эпюры, найти её ординату под собственным центром тяжести, перемножить эти величины и разделить на жесткость рассматриваемого участка рамы. Результаты перемножения на каждом участке алгебраически сложить.
саму на себя, т.е. на каждом участке вычислить площадь эпюры, найти её ординату под собственным центром тяжести, перемножить эти величины и разделить на жесткость рассматриваемого участка рамы. Результаты перемножения на каждом участке алгебраически сложить.
Как видно из рисунка 7.10 эпюра состоит из четырех одинаковых треугольников (жесткость рамы на этих участках также одинакова и равна 2EI) и двух одинаковых прямоугольников (жесткость рамы на этих участках также одинакова и равна EI). Тогда, применяя правило Верещагина, найдем:
 ;
;
Перемножая аналогично эпюры  и
и  , найдем главные коэффициенты δ22 и δ33:
, найдем главные коэффициенты δ22 и δ33:
 ;
;
 .
.
Необходимо помнить, что главные коэффициенты канонических уравнений всегда имеют положительные значения, так как площади и ординаты перемножаемых эпюр имеют один и тот же знак.
Вычисляем побочные коэффициенты канонических уравнений. Для этого перемножаем по правилу Верещагина единичные эпюры, имеющие разные индексы. Например, коэффициенты δ12=δ21 определяем перемножением единичных эпюр: и . Побочные коэффициенты могут иметь положительные, отрицательные или нулевые значения. Анализируя указанные эпюры, устанавливаем, что их перемножение следует выполнить на двух верхних стойках рамы.
На левой стойке эпюры и расположены по одну сторону от оси (справа), а на правой стойке эти эпюры расположены по разные стороны от её оси. Результат перемножения эпюр и по правилу Верещагина на левой стойке будет иметь знак плюс, а результат перемножения этих эпюр на правой стойке будет иметь такую же величину и знак минус. Алгебраическая сумма указанных результатов перемножения будет равной нулю.

Следовательно, единичные перемещения  .
.
Примечание: Эпюра имеет косую симметрию относительно вертикальной оси, проведенной через середины ригелей рамы, а эпюра является симметричной относительно той же оси. Результат перемножения таких эпюр всегда равен нулю.
Напомним, что результат перемножения двух эпюр на любом участке имеет положительный знак, если они расположены с одной стороны от оси стержня и отрицательный знак, если они расположены по разные стороны от оси стержня.
Эпюра является симметричной, аналогично эпюре . Поэтому результат перемножения её на эпюру будет равным нулю, т.е.  .
.
Вычислим побочные коэффициенты δ23=δ32, перемножая единичные эпюры и :

Определяем грузовые перемещения, перемножением грузовой эпюры на каждую из единичных эпюр. При этом используем свойство прямой и косой симметрии эпюр на отдельных участках.
Перемножаем эпюру  на эпюру в пределах нижнего ригеля:
на эпюру в пределах нижнего ригеля:
 ;
;
Перемножаем эпюру на эпюру на всех стойках:
 .
.
Перемножаем эпюру на эпюру на всех стойках и верхнем ригеле:
 .
.
7) Определяем значения неизвестных усилий в освобожденных связях заданной рамы из решения канонических уравнений:
 (7.20)
(7.20)
Из первого уравнения системы (7.20) находим 
Из решения второго и третьего уравнений системы (7.20), находим:

.
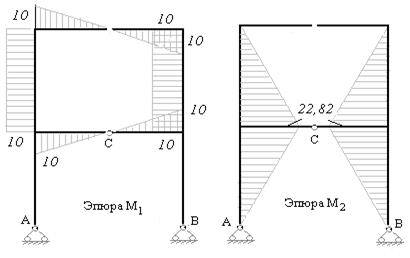
Рис.7.14 Рис.7.15
Рис.7.16
8) Строим исправленные эпюры изгибающих моментов в основной системе. Для этого умножаем ординаты единичных эпюр на найденные (из решения канонических уравнений) значения неизвестных усилий. На рис.7.14 – 7.15 построены исправленные эпюры изгибающих моментов (используем второй приём построения эпюры изгибающих моментов).
9) Строим эпюру изгибающих моментов в заданной статически неопределимой раме. Для этого в характерных сечениях рамы алгебраически суммируем ординаты трех эпюр изгибающих моментов, построенных в основной системе: грузовой эпюры и трех исправленных эпюр  ,
,  и
и  . На рис.7.17 построена эта эпюра.
. На рис.7.17 построена эта эпюра.
Рис.7.17
10) Проверяем правильность построенной эпюры изгибающих моментов в заданной раме:
а) статическая проверка по условиям равновесия жестких узлов рамы от действия узловых моментов. По эпюре видно, что все четыре жесткие узлы рамы 1.2.3 и 4 находятся в равновесии, т.е. сумма узловых изгибающих моментов в каждом жестком узле равна нулю;
б) деформационная проверка состоит в том, что перемещение в раме по направлению любой неизвестной метода сил должно быть равным нулю
Найдем, например, перемещение по направлению  (рис.7.18), во втором варианте основной системы. Для этого построим единичную эпюру изгибающих моментов
(рис.7.18), во втором варианте основной системы. Для этого построим единичную эпюру изгибающих моментов  и перемножим по правилу Верещагина эпюру
и перемножим по правилу Верещагина эпюру  на единичную эпюру . Предварительно сложные эпюры расчленяем на простые так, чтобы их площади и положения центров тяжести легко определялись. На рис.7.17 и 7.18 показано разделение сложных эпюр на простые эпюры. Криволинейная эпюра на верхнем ригеле разделена на параболический сегмент, имеющий ординату 54 по середине ригеля и трапецию. На стойках трапеции разделены на два треугольника. Тогда:
на единичную эпюру . Предварительно сложные эпюры расчленяем на простые так, чтобы их площади и положения центров тяжести легко определялись. На рис.7.17 и 7.18 показано разделение сложных эпюр на простые эпюры. Криволинейная эпюра на верхнем ригеле разделена на параболический сегмент, имеющий ординату 54 по середине ригеля и трапецию. На стойках трапеции разделены на два треугольника. Тогда:
Рис.7.18
 Таким образом, деформационная проверка выполняется. Следовательно, эпюра изгибающих моментов в заданной раме построена правильно.
Таким образом, деформационная проверка выполняется. Следовательно, эпюра изгибающих моментов в заданной раме построена правильно.
11) Используя правило Журавского, определяем поперечные силы на участках рамы, где эпюра М прямолинейна. Рама имеет пять таких участков:
Участок А-1.  кН.
кН.
Участок 1-2.  кН.
кН.
Участок 1-4.  кН.
кН.
Участок 3-4.  кН.
кН.
Участок 4-В.  кН.
кН.
Определяем поперечные силы на концах участка 2-3, загруженного равномерно распределенной нагрузкой. Для этого используем формулы (7.17) и (7.18):
 ,
,
 кН.
кН.
 кН.
кН.
На рис.7.19 построена эпюра поперечных сил. Поперечные силы со знаком плюс отложены вверх от осей каждого ригеля рамы, и влево от осей каждой стойки. Поперечные силы со знаком минус откладываются противоположно.
Рис.7.19
12) Определяем продольные силы в стержнях рамы, пользуясь методом равновесия узлов. Вырезаем сначала узлы 2 и 3, а затем узлы 1 и 4. Эти узлы загружаем неизвестными продольными усилиями, направленными от узлов, и известными поперечными силами в рассеченных стержнях. Величины и направления поперечных сил устанавливаются по эпюре поперечных сил (рис.13). Поперечная сила, имеющая знак плюс должна вращать узел по часовой стрелке, а поперечная сила, имеющая знак минус должна вращать узел против часовой стрелки. На рис.14 показаны все силы, действующие на каждый узел рамы.
Рис.7.20
Для каждого узла рамы составляем два уравнения равновесия, используя следующие два условия:
 и
и  .
.
Узел 2 (рис.7.20,а):
,  ,
,  кН.
кН.
,  ,
,  кН.
кН.
Узел 3 (рис.7.20,б):
,  ,
,  (проверка).
(проверка).
,  ,
,  кН.
кН.
Узел 1 (рис.7.20,в):
,  ,
,  кН.
кН.
,  ,
,  кН.
кН.
Узел 4 (рис.7.20,г):
,  , (проверка).
, (проверка).
,  ,
,  кН.
кН.
Эпюра продольных сил построена на рис.7.21.
Рис.7.21
Рис.7.22
13) Проверяем равновесие рамы в целом. Освобождаем раму от опор и загружаем её заданными нагрузками и реакциями освобожденных опорных
связей (рис.7.22)
Величины и направления этих реакций устанавливаем по эпюрам поперечных и продольных сил (рис.7.19 и 7.21).
Составляем три уравнения равновесия рамы, используя условия:
, , 
1)  ;
; 
2)  ;
;
3)  ,
,
Таким образом, все уравнения равновесия удовлетворяются. Расчет рамы методом сил выполнен без ошибок.
Пример 7.2: Построить эпюры внутренних усилий для статически неопределимой рамы с наклонным ригелем и вертикальными стойками, защемленными у основания (рис.7.23). Жесткости стоек принять равными  , жесткость ригеля равной
, жесткость ригеля равной  .
.
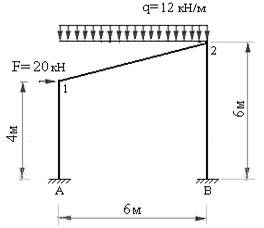
Рис.7.23
Последовательность расчета:
1. Устанавливаем степень статической неопределимости заданной рамы, используя формулу (1.1).
;  .
.
Таким образом, заданная рама имеет три независимых неизвестных метода сил.
2. Образуем основную систему метода сил. Из всех возможных основных систем, которые предлагаем образовать самостоятельно, выберем расчетную основную систему путем вертикального разреза ригеля в узле 1 заданной рамы (рис.7.24,а). Эта система является статически определимой и состоит из двух неподвижных и геометрически неизменяемых частей: левой стойки А-1 и ломаного стержня 1-2-В.
3. Создаем эквивалентную систему метода сил. Для этого основную систему загружаем заданными нагрузками и неизвестными усилиями  и
и  (рис. 7.24,б)
(рис. 7.24,б)
Рис.7.24
4. Записываем систему канонических уравнений метода сил:
(7.21)
5. Строим единичные эпюры и грузовую эпюру изгибающих моментов в основной системе.
Рис.7.25 Рис.7.26
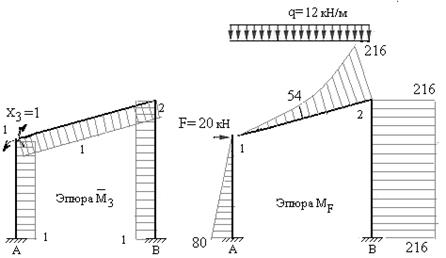
Рис.7.27 Рис.7.28
В отличие от рамы, рассмотренной в примере 1, эти эпюры можно построить, не определяя реакции, которые возникают в защемляющих опорах от заданных нагрузок. Изгибающие моменты определяются по участкам, рассматриваемым от проведенного сечения (разреза) рамы к опорам. На рисунках 7.25-7.28 построены единичные эпюры и грузовая эпюра изгибающих моментов в основной системе. При этом ординаты эпюр отложены перпендикулярно осям стержней со стороны растянутых волокон.
6. Определяем коэффициенты и грузовые перемещения канонических уравнений, пользуясь правилом Верещагина.
Примечание: При перемножении эпюр изгибающих моментов по правилу Верещагина учитывается истинная длина каждого стержня или каждого участка.
Вычислим предварительно длину наклонного ригеля.
 . Тогда найдем:
. Тогда найдем:









7. Подставляем эти значения в канонические уравнения, переносим грузовые перемещения в правые части и решаем полученную систему уравнений методом уравнивания коэффициентов при неизвестных:

 (7.22)
(7.22)

Разделим каждое уравнение на коэффициенты при неизвестном усилии :
аждое уравнение на коэффициенты при  ий авнивания коэффициентов при неовые перемещения в правые части и
ий авнивания коэффициентов при неовые перемещения в правые части и
 (7.23)
(7.23)

Вычитаем из первого уравнения системы (7.23) второе, а затем третье, получаем новую систему двух уравнений с двумя неизвестными:

 (7.24)
(7.24)
Уравниваем коэффициенты при неизвестном усилии и вычитаем первого полученного уравнения второе:

 (7.25)
(7.25)
Вычитаем из второго уравнения системы (7.25), первое, находим неизвестное усилие :  кН. Из первого уравнения системы (7.25) определяем величину неизвестного усилия :
кН. Из первого уравнения системы (7.25) определяем величину неизвестного усилия :  кН. Для проверки правильности вычислений следует подставить во второе уравнения системы (7.25) и убедиться, что оно обращается в тождество
кН. Для проверки правильности вычислений следует подставить во второе уравнения системы (7.25) и убедиться, что оно обращается в тождество  .
.
Из первого уравнения системы (7.23) определяем величину усилия :
 кНм. При подстановке всех найденных значений неизвестных усилий во второе и третье уравнения системы (7.23) они должны тождественно удовлетворяться, аналогично предыдущему.
кНм. При подстановке всех найденных значений неизвестных усилий во второе и третье уравнения системы (7.23) они должны тождественно удовлетворяться, аналогично предыдущему.
8. Строим исправленные эпюры изгибающих моментов в основной системе путем умножения ординат единичных эпюр на значения усилий, полученные из решения канонических уравнений метода сил (рис.7,29 – 7.31).
Рис.7.29 Рис.7.30
Рис.7.31
Так как все три усилия имеют знак плюс, то их направления, принятые предварительно, верны и исправленные эпюры будут полностью совпадать по виду с единичными эпюрами. Ординаты исправленных эпюр получаем умножением ординат единичных эпюр на значения соответствующих усилий.
9. Строим эпюру изгибающих моментов в заданной статически неопределимой раме. Для этого суммируем ординаты грузовой эпюры и трех исправленных эпюр, построенных в основной системе метода сил, т.е. эпюр, построенных на рис. 7.28 – 7.31. На рис.7.32 построена эпюра изгибающих моментов в заданной раме. Легко подсчитать величины ординат этой эпюры и убедиться в правильности её построения.
Рис.7.32
10. Осуществим статическую и деформационную проверки эпюры изгибающих моментов.

Рис.7.33
а) Статическая проверка состоит в том, что жесткие узлы рамы 1 и 2 должны находиться в равновесии под действием узловых изгибающих моментов.
Вырезаем жесткие узлы рамы 1 и 2. На эти узлы действуют изгибающие моменты, величины и направления которых, определяем по эпюре изгибающих моментов (моменты действуют из растянутой зоны в сторону сжатой зоны стержней). На рис.7.33 показано загружение узлов узловыми изгибающими моментами. Легко убедиться, что алгебраическая сумма моментов, действующих на каждый узел равна нулю.
б) Деформационная проверка. Выбираем новый вариант основной системы путем замены защемляющих опор рамы шарнирно неподвижными и введения шарнира в узел 2 заданной рамы. В результате получаем трехшарнирную раму (рис.7.34).
Рис. 7.34 Рис.7.35
Загрузим её единичными моментами =1, вычислим горизонтальные реакции опор и построим единичную эпюру в этой системе (рис.7.35).
При перемножении эпюр (рис.7,32) и (рис.7.35) рассматриваем три стержня. На стойках А-1 и В-2 эпюры прямолинейные и их перемножение не вызывает трудностей. На ригеле 1-2 эпюра (рис.7.32) криволинейная, но она может быть разделена на три простые фигуры, площади и положения центров тяжести которых, легко определяются. Этими фигурами являются:
1) квадратичная парабола, имеющая основанием ригель длиною 6,325 м. и максимальную ординату посредине его длины. Эта ордината равна  кНм. Площадь такой эпюры равна 2/3 произведения длины на максимальную ординату, а центр тяжести располагается посредине длины ригеля (ордината эпюры под центром тяжести эпюры М равна половине суммы её ординат на концах ригеля);
кНм. Площадь такой эпюры равна 2/3 произведения длины на максимальную ординату, а центр тяжести располагается посредине длины ригеля (ордината эпюры под центром тяжести эпюры М равна половине суммы её ординат на концах ригеля);
2) треугольника, расположенного сверху ригеля;
3) треугольника, расположенного снизу ригеля. Площади этих треугольников и положения их центров тяжести легко определяются, а следовательно, легко вычисляются необходимые ординаты единичной эпюры. Вычислим перемещение  .
.
Таким образом, деформационная проверка выполняется. Эпюра изгибающих моментов в заданной раме построена правильно.
11. Определяем поперечные силы в каждом стержне рамы и строим эпюру этих сил.
На стойках рамы эпюра изгибающих моментов ограничена прямыми линиями, наклоненными к оси стержня. Тангенсы углов наклона этих прямых равны поперечным силам, т.е.
 кН,
кН,  кН
кН
На ригеле 1-2 эпюра изгибающих моментов имеет криволинейное очертание по квадратичной зависимости, поэтому эпюра поперечных сил будет ограничена прямой, наклоненной к оси ригеля.
Для построения такой эпюры достаточно вычислить две её ординаты в сечениях 1 и 2 ригеля. Воспользуемся методом равновесия дисков. Вырезаем ригель 1-2 из рамы и загружаем его: заданной равномерно распределенной нагрузкой интенсивностью 12 кн/м, известными изгибающими моментами в сечениях 1 и 2 (их величины и направления устанавливаем по эпюре изгибающих моментов), а также неизвестными поперечными силами в сечениях 1 и 2 ригеля. Эти силы направляем перпендикулярно оси ригеля так, чтобы они вращали вырезанный стержень по часовой стрелке (рис.7.36).
Рис.7.36
Составляем два уравнения равновесия стержня 1-2, используя рациональные условия равновесия:



 кН.
кН.


 кН.
кН.
На рис.7.37 построена эпюра поперечных сил.
12. Определяем продольные силы в стержнях заданной рамы, пользуясь методом равновесия узлов.
Вырезаем узлы 1 и 2 рамы и загружаем их заданными нагрузками (к узлу 1 приложена сила 20 кн, направленная вправо), известными поперечными силами (величины и направления этих сил устанавливаем по эпюре поперечных сил), а также неизвестными продольными силами, которые
Рис.7.37
направляем от узлов (в соответствии с предполагаемым растяжением стержней). На рис.7.38 показано загружение узлов 1 и 2 заданной рамы.
Рис.7,38
Выбираем для каждого узла систему координат так, чтобы одна из осей была перпендикулярной к одному неизвестному усилию, а другая ось перпендикулярна к другому неизвестному усилию. В этом случае уравнения равновесия будут разделенными относительно неизвестных.
Составляем уравнения равновесия узла 1:

 ,
,
 , тогда
, тогда
 кН
кН
 , тогда:
, тогда:
 кН.
кН.
Составляем уравнения равновесия узла 2:
 ,
,
откуда
 кН.
кН.
 ,
,
откуда
 кН.
кН.
На рис.7.39 построена эпюра продольных сил для заданной рамы.
Рис.7.39
13. Проверяем равновесие рамы в целом.
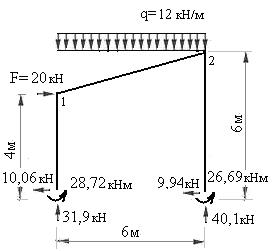
Рис.7.40
Для этого освобождаем её от опор и загружаем заданными нагрузками и реакциями опорных связей. Величины и направления реакций опор устанавливаем по эпюрам изгибающих моментов, поперечных и продольных сил. На рис.7.40 показано загружение рамы, при котором она должна удовлетворять трем условиям равновесия статики.
Составим уравнения равновесия и убедимся, что они тождественно удовлетворяются:



Таким образом, расчет заданной статически неопределимой рамы выполнен правильно.
Пример 7.3. Построить эпюры изгибающих моментов, поперечных и продольных сил для двухпролетной одноэтажной рамы при заданных нагрузках (рис.7.41).
 Рис.7.41
Рис.7.41
Последовательность расчета:
1. Устанавливаем степень статической неопределимости заданной рамы, используя формулу (1.1).
;  .
.
Таким образом, заданная рама имеет пять независимых неизвестных метода сил, т.е. она является пять раз статически неопределимой.
2. Образуем основную систему метода сил путем освобождения 5-ти лишних связей. На рис.7.42 показан расчетный вариант основной системы. 
Рис.7.42
Чем выше степень статической неопределимости рамы, тем больше вариантов основной системы метода сил может быть образовано. Предлагаем образовать самостоятельно четыре варианта основной системы, а расчетный вариант основной системы образуем путем вертикального разреза ригеля 2-3 рамы посередине второго пролета и удаления шарнирно-неподвижной опоры 0 (рис.7.42). Эта система является статически определимой и состоит из двух неподвижных и геометрически неизменяемых частей: левого ломаного стержня, защемленного у основания 5 средней стойки и ломаного правого стержня, защемленного у основания 4 правой стойки.
3. Создаем эквивалентную систему метода сил. Для этого основную систему загружаем заданными нагрузками и неизвестными усилиями , , ,  и
и  (рис 7.43).
(рис 7.43).
Рис.7.43
4. Записываем систему канонических уравнений метода сил:


 (7.25)
(7.25)


5. Строим единичные эпюры изгибающих моментов и грузовую эпюру в основной системе. Как в примере 2, эти эпюры можно построить, не определяя реакции, которые возникают в защемляющих опорах от заданных нагрузок. Изгибающие моменты определяются по участкам, рассматриваемым от свободных (не закрепленных) концов стержней к опорам.
Рис.7.44
На рисунках 7.44 – 7.49 построены единичные эпюры и грузовая эпюра изгибающих моментов в основной системе. Напоминаем, что ординаты эпюр изгибающих моментов должны быть отложены перпендикулярно осям стержней со стороны растянутых волокон.
Рис.7.45
Рис.7.46
Рис.7.47
Рис.7.48
Рис.7.49
6. Определяем коэффициенты и грузовые перемещения канонических уравнений, пользуясь правилом Верещагина:
 ,
,
 ,
,
 ,
,  ,
,
 ;
;
 ,
,  ,
,
 ,
,  ;
;

 ,
,
 ,
,
 ;
;

 ,
,
 ;
;


7. Подставляем эти значения в канонические уравнения, умножаем на жесткость , переносим грузовые перемещения в правые части и решаем полученную систему уравнений методом уравнивания коэффициентов при неизвестных:


 (7.26)
(7.26)


Уравниваем коэффициенты при неизвестном усилии . Для этого первое уравнение делим на -48, второе уравнение делим на -18, четвертое и пятое уравнения делим соответственно на 36 и 16. Третье уравнение разделим на 333,3333. В результате получим систему уравнений (7.27):


 (7.27)
(7.27)

Вычитаем последовательно из первого уравнения системы (7.27) второе, четвертое и пятое уравнения и сохраняем третье уравнение без пятого слагаемого левой части, в результате получим:


 (7.28)
(7.28)

Исключаем в этой системе неизвестное усилие и получаем систему трех уравнений с тремя неизвестными:

(7.29)

Уравниваем коэффициенты при неизвестном усилии :

 (7.30)
(7.30)

Вычитаем последовательно из первого уравнения второе и третье, получаем:

 (7.31)
(7.31)
Уравниваем коэффициенты при неизвестном усилии  :
:

 (7.32)
(7.32)
Вычитаем из первого уравнения второе, получаем:
 , откуда
, откуда  кН. Из первого уравнения системы (7.31) определяем величину усилия :
кН. Из первого уравнения системы (7.31) определяем величину усилия :  кН. Второе уравнение системы (7.31) используем для проверки выполненных вычислений:
кН. Второе уравнение системы (7.31) используем для проверки выполненных вычислений:  , откуда
, откуда  .
.
Из первого уравнения системы (7.30) определяем величину неизвестного усилия :  кН.
кН.
После подстановки величин трех найденных усилий во второе и третье уравнения системы (7.30) получаем тождественное равенство их левых и правых частей:
 , откуда
, откуда  .
.
 , откуда
, откуда  .
.
Величину неизвестного усилия определяем из первого уравнения системы (7.28):
 кН.
кН.
Остальные три уравнения системы (2.11) обращаются в тождества при подстановке значений найденных усилий.
Величину неизвестного усилия определяем из первого уравнения системы (7.27):
 кНм.
кНм.
Остальные четыре уравнения системы (7.27) обращаются в тождества при подстановке значений найденных усилий.
8. Строим исправленные эпюры изгибающих моментов в основной системе. Для этого ординаты единичных эпюр умножаем на соответствующие значения найденных усилий с учетом их знаков. Если усилие имеет знак плюс, то исправленная эпюра совпадает по виду с единичной эпюрой, но имеет другие ординаты. Если же усилие имеет знак минус, то исправленная эпюра имеет зеркальное изображение
Рис.7.50
Рис.7.51
Рис.7.52
Рис.7.53
Рис.7.54
единичной эпюры, т.е. единичную эпюру необходимо повернуть вокруг оси каждого стержня на угол равный 1800 и её ординаты умножить на модуль усилия. В рассматриваемом примере ординаты исправленной эпюры М3 откладываем от оси каждого стержня, противоположно ординатам единичной эпюры. На рис.7.50 – 7.54 построены исправленные эпюры.
9. Строим эпюру изгибающих моментов в заданной статически неопределимой раме. Ордината эпюры изгибающих моментов в любом сечении заданной рамы равна алгебраической сумме ординат, взятых в том же сечении грузовой эпюры и всех исправленных эпюр. На рис 7.55 построена эпюра изгибающих моментов в заданной раме. Рекомендуем проверить правильность вычисления ординат этой эпюры в характерных сечениях каждого стержня заданной рамы, а также осуществить статическую и деформационную проверки, как было выполнено в примерах 1 и 2.
Рис.7.55
10. Вычисляем поперечные силы на отдельных участках рамы по формуле Журавского (на участках, где эпюра М прямолинейна) или по методу равновесия дисков (на участках, где эпюра М криволинейна). На рис.7.56 построена эпюра поперечных сил. Предлагаем проверить правильность вычисления ординат этой эпюры.
Рис.7.56
11. Вычисляем продольные силы в стержнях заданной рамы, пользуясь методом равновесия узлов, и строим эпюру N (рис.7.57).
Предлагаем проверить ординаты эпюры продольных сил и выполнить проверку равновесия рамы в целом, как было выполнено в примерах 1 и 2.
Рис.7.57
Вопросы для самоконтроля полученных знаний.
1. Какая система является статически неопределимой?
2. Как степень статической неопределимости связана с числом степеней свободы?
3. Какова степень статической неопределимости замкнутого бесшарнирного. контура?
4. Как определить степень статической неопределимости системы, исходя из понятия о замкнутом контуре?
5. Какие системы относят к внутренне статически неопределимым?
6. Назовите три основных метода расчета статически неопределимых систем.
7. Что принимается в качестве неизвестных метода сил?
8. Что представляет собой основная система метода сил?
9. В чем различие между абсолютно необходимыми и условно необходимыми связями?
10. Могут ли абсолютно необходимые связи считаться лишними?
11. Приведите возможные способы отбрасывания связей.
12. Что представляют собой канонические уравнения метода сил?
13. Что представляют собой коэффициенты и свободные члены канонических уравнений метода сил?
14. Какой метод положен в основу определения коэффициентов и свободных членов канонических уравнений?
15. Каково свойство главных коэффициентов канонических уравнений?
16. Как можно определить усилия в заданной системе после определения лишних неизвестных?
17. Как проверить правильность вычисления коэффициентов и свободных членов канонических уравнений?
18. Как проверить правильность расчета статически неопределимой системы методом сил?
19. Какие способы применяются для упрощения расчета симметричных систем методом сил?
20. Какие преимущества дает выбор симметричной системы метода сил при расчете на: а) произвольную нагрузку, б) симметричную и в) кососимметричную нагрузку?
21. Как определить перемещение в статически неопределимой системе?
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
ФГАОУ ВО «Крымский федеральный университет
Имени В.И. Вернадского»
Академия строительства и архитектуры
Кафедра механики и сейсмостойкости сооружений
Дата: 2019-02-02, просмотров: 536.