Судовые электрические машины переменного и постоянного тока
ЭДС, электромагнитная мощность и электромагнитный момент МПТ.
Результирующая ЭДС.
Значение результирующей ЭДС, наведенной в обмотке якоря генератора, или противо-ЭДС, наведенной в обмотке якоря двигателя, определяется следующим путем:
Если обмотки якоря состоят из N проводников и образуют 2а параллельных ветвей, то в каждой ветви количество последовательных соединенных проводников будет равно N/2а.
ЭДС, наведенная в одном проводнике, определяется по формуле
Е = Вlv,
Где В – среднее значение магнитной индукции в воздушном зазоре машины, Т, l – расчетная длина ротора (активной части провода), м, v – линейная скорость вращения ротора, м/с
Результирующая ЭДС проводников, составляющих любую параллельную ветвь (что является и результирующей ЭДС обмотки якоря), будет в N/2a раз больше ЭДС одного проводника, т.е.
E = BlvN/2a (1.1)
Линейная скорость ротора определяется формулой
v = π Dn/60
Где D – диаметр ротора, м, n – частота вращения ротора, об/мин, π – 3.14
Расстояние между точками с нулевыми значениями магнитной индукции, отсчитанное по длине окружности ротора наз. полюсным делением машины и обозначается буквой τ .Если машина имеет 2р полюсов, то длину окружности ротора можно определить по формуле
π D = 2 pτ
Линейная скорость вращения ротора
Подставив это выражение в формулу (1.1), получим
 (1.2)
(1.2)
Произведение lτ есть площадь S поверхности, которую пронизывают линии магнитной индукции.
Магнитный поток Ф, сцепленный с обмоткой якоря:
Ф = BS = B/ L
Подставив последнее выражение в формулу (1.2) и произведя сокращения получим:

или
Е = Cе nФ (1.3)
где Cе = pN/60 a – постоянный коэффициент.
Следовательно , значение ЭДС (или противо-ЭДС), наведенной в обмотке якоря машины постоянного тока, пропорционально частоте вращения ротора и магнитному потоку, создаваемому обмотками возбуждения статора.
Электромагнитный момент.
При прохождении по пазовым проводникам обмотки якоря тока I на каждом из проводников появляется электромагнитная сила:
Fэм = BLi
Совокупность всех электромагнитных сил Fэм на якоре, действующих на плечо, равное радиусу сердечника якоря (Da /2), создает на якоре электромагнитный момент М. Так как сила Fэм действует одновременно на число пазовых проводников Ni = aiN, то электромагнитный момент машины постоянного тока
M = Fэм aiN ( Da /2)
Преобразуя далее получаем формулу электромагнитного момента
 М = cмФI
М = cмФI
где Ia- ток якоря, А, См- постоянный коэффициент
Подставив в эту формулу значение основного потока Ф = Е/се n получим еще одно выражение электромагнитного момента 
где ω = 2πn/60 - угловая скорость вращения
Принцип действия АД.
Получение вращающегося магнитного потока.
Принцип действия основан на взаимодействии вращающегося магнитного потока статора с токами, которые наводятся этим потоком в обмотке ротора.
Обмотка статора в простейшем случае состоит из трех катушек, сдвинутых в пространстве относительно друг друга на 120º. Она может соединяться как звездой, так и треугольником и включается в сеть трехфазного тока. График токов представляет собой три синусоиды, сдвинутые относительно друг друга на 120º.
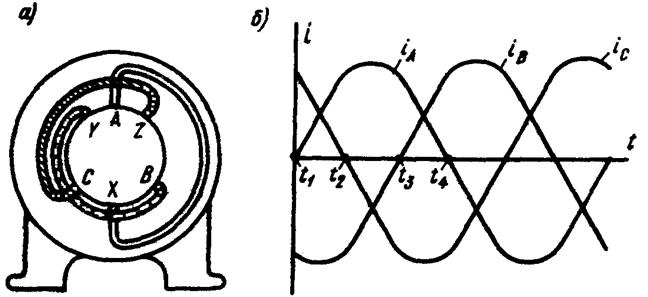
Рис.4.4. Обмотка статора в простейшем случае и график токов
Токи, протекающие по виткам, создают магнитные поля, направление которых определяется по правилу буравчика. Определим направление магнитных полей для нескольких моментов времени t1, t2, t3, t4.
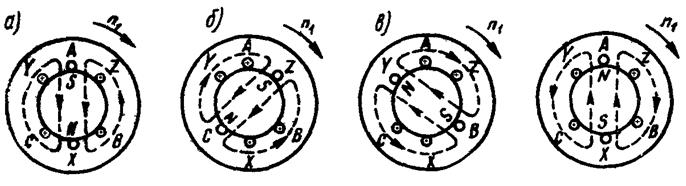
Рис.4.5. Расположение магнитного поля статора в различные моменты времени.
В момент t1 ток в витке АХ равен 0, следовательно, равно 0 и магнитное поле вокруг проводов витка. В этот же момент в витке BY ток отрицателен, а в витке CZ положителен. Направление результирующего магнитного поля вокруг проводов этих витков для момента t1 показан на рис.4.5, а) на котором изображен поперечный разрез статора.
В момент t2 ток в витке CZ равен нулю, значит равно 0 и магнитное поле вокруг проводов витка. В этот же момент в витке АХ ток положителен, а в витке BY по-прежнему отрицателен. Направление результирующего магнитного поля вокруг проводов этих витков для момента t2 показано на рис.4.5,б). Сравнивая положение магнитного поля в момент t1 с расположением его в момент t2 приходим к заключению, что за время t1- t2 (то есть за 1/6 периода) магнитный поток повернулся вправо на 60º. Аналогично, рассматривая моменты времени t3, t4, приходим к выводу, что с течением времени магнитный поток поворачивается. За время одного периода поток повернется на 360º.
Таким образом, при протекании по статорной обмотке трехфазного асинхронного двигателя трехфазного переменного тока в статоре возникает вращающийся магнитный поток. Обязательным условием образования вращающегося магнитного потока является угловое смещение катушек обмотки в пространстве и сдвиг по фазе токов, протекающих по катушкам.
Скорость вращения магнитного потока статора определяется по формуле:
n1 
Из рассмотренного примера следует, что при наличии трех катушек в обмотке статора образуется магнитный поток с одной парой полюсов (p=1). Если количество катушек увеличить до шести, расположив их в пространстве относительно друг друга под углом 60˚, и соединить последовательно в каждой фазе обмотки по две катушки, то магнитный поток будет иметь по две пары полюсов (p=2).
Подставив это значение в формулу скорости, получим скорость вращения в два раза ниже, чем при р=1. Таким образом, изменяя число пар полюсов можно ступенчато изменять скорость вращения эл. двигателя.
Для изменения направления вращения необходимо изменить порядок чередования тока в катушках, т.е. переключить два любых провода, которыми обмотка включена в сеть. Вращающийся магнитный поток статора пересекает провода обмотки ротора и наводит в них ЭДС. Под действием ЭДС в проводах короткозамкнутой обмотки ротора возникают токи. В результате взаимодействия этих токов с вращающимся потоком статора возникают электромагнитные силы, создающие вращающий момент. Под действием этого момента ротор начинает вращаться со скоростью n2.
Скорость вращения n2 всегда ниже скорости вращения магнитного потока статора n1, так как только в этом случае поток статора пересекает обмотку ротора и в ней возникают ЭДС и токи, то есть вращающий момент. Если бы скорости были равны, то потоки не пересекались бы относительно друг друга, и ЭДС не наводилась бы.
При увеличении тормозного момента на валу асинхронного эл. двигателя уменьшается скорость вращения ротора. При этом возрастает скорость пересечения обмоток ротора магнитным потоком статора. Следовательно, увеличивается ЭДС ротора, возрастает ток ротора, возрастает момент вращения ротора, возрастает скорость вращения ротора. При уменьшении тормозного момента процессы протекают противоположно.
Двигатель, скорость вращения ротора которого не равна скорости вращения магнитного потока статора и изменяется при изменении нагрузки на валу наз. асинхронным.
Судовые электростанции.
СЭС – это энергетический комплекс, обеспечивающий производство и распределение эл.энергии и включающий в себя судовые источники электроэнергии, первичный распределительный щит и помещения со своим оборудованием. По назначению и составу СЭС подразделяются на основные и аварийные.
Структура СЭС должна гарантировать высокое качество эл.энергии, бесперебойность электроснабжения, экономичность использования источника эл.энергии и безопасность технической эксплуатации.
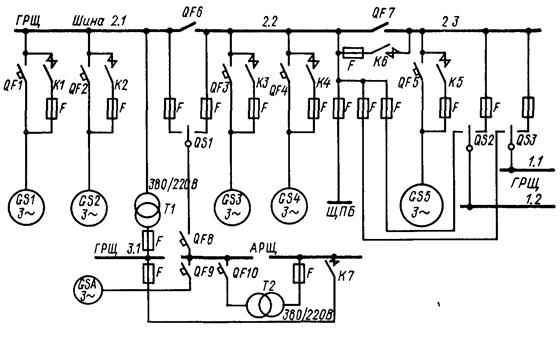
На современных судах обычно предусмотрена параллельная работа генераторов на одну систему сборных шин, секционированную с помощью коммутационных аппаратов и съемных шинных накладок для обеспечения раздельной работы дизель и валогенераторов, (дизель и турбогенераторов), питания мощных потребителей от отдельного генератора, ремонта ГРЩ и других целей. Секционирование шин на две системы с симметричным распределением генераторов и ПЭ необходимо осуществлять на всех судах при общей мощности параллельно работающих генераторов не ниже 750 кВт. Возможно использование дополнительных систем шин: шин синхронизации, шин электродвижения, шин освещения и шин бытовых ПЭ, отделенных от сборных шин трансформаторами.
На добывающих судах структура СЭС связана с наличием специальных ПЭ – мощных промысловых лебедок и условиями промысла. Ранее применяли автономные дизель-генераторные СЭС постоянного и переменного тока. Позднее стали применять комбинированные СЭС переменного тока с валогенераторами отбора мощности от дизель-редукторной СЭУ с ВРШ. В настоящее время применяют комбинированные СЭС.
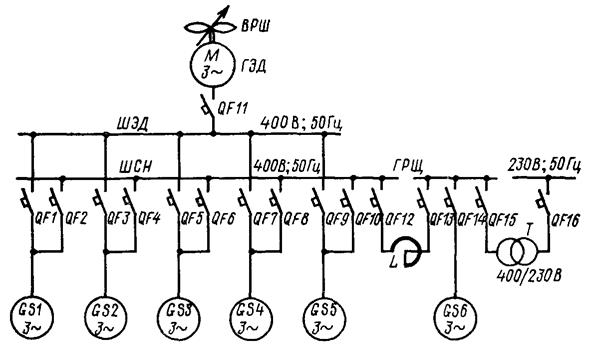
Рис. 3.1. Структурная схема единой СЭС БМРТ "Алтай"
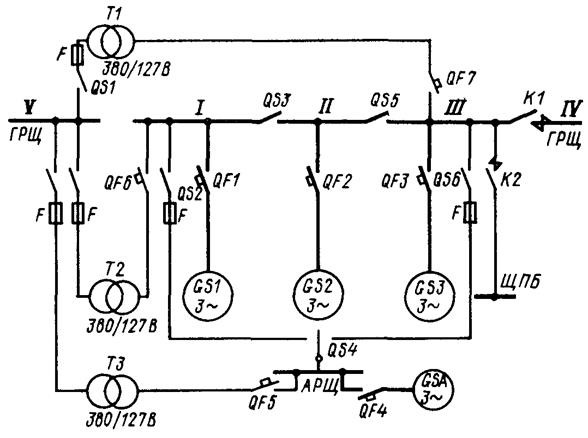
Рис. 3.2. Структурная схема автономной СЭС
ТР "Хибинские горы
3.3. Структурная схема комбинированной СЭС РТМ-С "Прометей"
Приемники энергии (ПЭ).
Это устройство, преобразующее электроэнергию в другой вид энергии.
Классификация :
1. По виду производимой энергии.
2. По назначению.
3. По степени надежности электроснабжения.
4. По режиму работы.
Основными ПЭ а электроприводах являются электродвигатели, различающиеся серией, типоразмерами, номинальными параметрами, видом климатического исполнения, степенью защиты от внешних воздействий и конструктивным исполнением по способу монтажа.
Срок службы эл.двигателей пост.тока типа ПМ и ДПМ до 25 лет, межремонтный ресурс до 100 тыс.ч. с заменой подшипников через 25 тыс.ч.
В судовых эл.приводах переменного тока применяются трехфазные асинхронные эл.двигатели с короткозамкнутым ротором напряжением 220 и 380 в. срок их службы составляет 20 – 25 лет, межремонтный ресурс 200 тыс.ч. с заменой подшипников через 12 тыс.ч.
Исполнение и применение см. Сухарев стр.19 –20 .
Электроприводы судовых вспомогательных механизмов и их эксплуатация
Автоматизация управления электродвигателями позволяет значительно увеличить производительность и надежность работы двигателей. Роль обслуживающего персонала в этом случае сводится к первоначальной наладке и настройке системы управления и дальнейшему периодическому наблюдению за ее состоянием.
Автоматизация управления осуществляется в различных направлениях: обеспечивается автоматический пуск, регулирование скорости вращения, торможение, реверсирование, остановка, защита и контроль за работой двигателей.
В качестве примера рассмотрим схему автоматического управления двигателем санитарного насоса, (рис 2.2.), работающего на пополнение расхода воды из гидрофора. Ввиду малой мощности электродвигателя схемой предусмотрен прямой пуск при помощи обычного магнитного пускателя. При ручном управлении переключатель режимов П1 устанавливают в положение «ручное», вследствие чего он присоединяет пускатель к местному кнопочному посту, необходимому при наладочных работах, проверках и т. д. Для автоматического управления переключатель поворачивают в положение «автоматическое» и присоединяют этим к пускателю двухпозиционное реле давления с контактами РДmin и PДmax. Если из-за большого расхода воды давление в гидрофоре понизится и станет меньше уставки реле, последнее замкнет свой контакт РДmin и включит электродвигатель насоса. Давление в гидрофоре начнет увеличиваться, и через некоторое время контакт PДmin разомкнется. Однако электродвигатель из-за этого не отключится — линейный контактор Л после срабатывания получает питание через собственный блок-контакт помимо контакта PДmin. При достижении заданного давления реле снова сработает и разомкнет контакт PДmax.
Электродвигатель в связи с этим остановится, а схема управления возвратится в исходное состояние, будучи готова к новому циклу работы. Аналогично рассмотренной схеме действуют и схемы с поплавковыми реле.
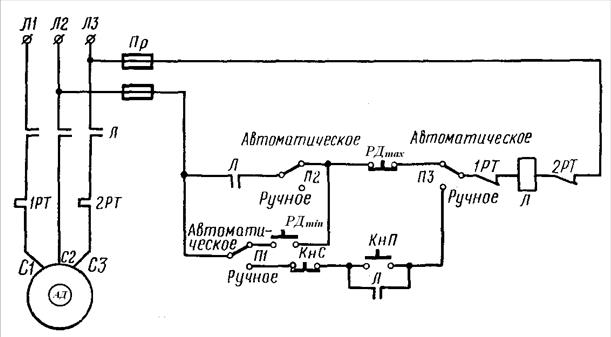
Рис 2.2. Схема автоматического управления двигателями санитарных насосов
Примерно аналогично работает схема автоматического управления компрессорами холодильной установки. В ней датчиками (кроме реле давления) являются температурные реле, включающие электропривод компрессора при повышении (выше заданной) температуры в камере холодильной установки и отключающие электропривод, когда температура понизится до заданной величины.
Автоматизация управления холодильной установки освобождает обслуживающий персонал от необходимости включать и отключать в нужное время компрессоры и постоянно контролировать температуру в камерах.
Широкое распространение на судах получила автоматизация управления электроприводом механизмов котельных установок, что позволяет не только облегчить и улучшить условия труда обслуживающего персонала, но и значительно снизить расход топлива.
Автоматизируются также судовые климатические установки и другие устройства и системы.
Компрессора
Воздушные: Служат для пополнения запасов воздуха в воздушной системе пускового воздуха, воздушной системе хозяйственных нужд. На судне воздух хранится в баллонах. Контроль за давлением осуществляется с помощью реле давления, установленных в воздушной магистрали. Эти реле включены в цепь управления компрессоров. При падении давления до минимально допустимой величины происходит автоматический пуск привода, при достижении максимального давления привод останавливается. Параллельно предусмотрена сигнализация о минимальном и рабочем давлении. Предусмотрено ручное управление компрессорами.
Аммиачные и фреоновые компрессора предназначены для выработки холода. Их система управления предусматривает слежение за температурой хладагента, температурой среды в охлаждаемом помещении, давлением хладагента. Кроме данных параметром необходимо предусмотреть при управлении очередность включения компрессоров, отключение при неполной загрузке, защиту цепей управления и цепей главного тока от перегрузки и короткого замыкания, работы на двух фазах, от обратного тока и т.д. Для этого предусмотрены специальные щиты управления, на которых смонтированы приборы, обеспечивающие работу электрооборудования рефрижераторного отделения.
Рулевой электропривод
Рулевой электропривод служит для перекладки руля. Различают электромеханические и электрогидравлические рулевые приводы.
В электромеханических рулевых приводах баллер руля приводится в движение исполнительным (рулевым) электродвигателем при помощи механической передачи. Механическая передача обычно состоит из зубчатого сектора, закрепляемого на баллере руля, и червяка, который скреплен с валом рулевого электродвигателя и передает вращение вала зубчатому сектору при помощи колеса червячного зацепления.
В электрогидравлических рулевых приводах баллер руля приводится в движение исполнительным электродвигателем при помощи гидравлической машины.
Согласно Правилам Регистра РФ рулевой электропривод должен обеспечивать:
1. перекладку руля с борта на борт на полном переднем ходу при номинальной осадке судна за время не более 28 сек;
2. непрерывную перекладку руля с борта на борт при тех же условиях в течение 0,5 час;
3. длительную работу при ходе по курсу в режиме не менее 350 перекладок в час;
4. изменение вращающего момента рулевого двигателя от 0 до 200% от номинального;
5. режим стоянки рулевого двигателя под током в течение 1 мин с нагретого состояния;
6. перекладку руля с борта на борт при среднем заднем ходе.
Рулевые электроприводы по принципу управления бывают простого, следящего и автоматического действия.
В приводах простого действия для перекладки руля в положения «Право» или «Лево» нужно повернуть в соответствующую сторону рукоятку или штурвал поста управления рулевым двигателем и удерживать ее в определенном положении до тех пор, пока руль не переместится на необходимый угол, после чего рулевой двигатель остановить возвращением рукоятки или штурвала в нейтральное положение. При этом угол отклонения рукоятки или штурвала поста управления от нейтрального положения не равен углу отклонения пера руля. От направления и угла отклонения рукоятки или штурвала зависит только направление и скорость перекладки руля: Угол отклонения пера руля определяется по рулевому указателю (аксиометру).
В приводах следящего действия направление и угол перекладки руля соответствуют углу поворота рукоятки или штурвала поста управления. Рулевой двигатель автоматически останавливается только тогда, когда перо руля установится в положении, соответствующем углу отклонения рукоятки или штурвала от нейтрального положения. Применение привода следящего действия позволяет по сравнению с приводом простого действия вдвое сократить число манипуляций, производимых рулевым при одном и том же цикле работы привода. В приводах автоматического действия при всяком отклонении судна от заданного курса рулевой двигатель автоматически, без участия рулевого, приходит в действие и перекладывает руль. После возвращения судна на заданный курс рулевой двигатель останавливается. Привод автоматического действия является следящим, но не за степенью отклонения рукоятки или штурвала управления, а за отклонением судна от заданного курса. Автоматический привод связывается с гирокомпасом или магнитным компасом, от которого он получает командные импульсы для перекладки руля. Применение автоматического привода значительно сокращает число перекладок руля, что приводит к увеличению средней скорости судна и уменьшению расхода топлива.
Для управления электромеханическими рулевыми приводами применяются системы управления — контакторная и генератор — двигатель.
Контакторная система управления рулевыми приводами вследствие наличия большого числа контактов менее надежна, чем система генератор — двигатель, и требует тщательного ухода за реле и контакторами. Поэтому ее обычно применяют для электроприводов небольшой мощности.
Система генератор — двигатель надежна в работе, не требует большого внимания во время эксплуатации и поэтому находит широкое применение. Система управления генератор — двигатель бывает простого и следящего действия.
Грузоподъемные механизмы.
Предназначены для погрузки, выгрузки и перемещения грузов. На судах рыбопромыслового флота используются более интенсивно, чем на судах других отраслей, и их работа в море имеет ряд специфических особенностей. Судовые грузоподъемные механизмы должны обладать надежностью в эксплуатации, высокой производительностью, быть экономичными, иметь удобное управление, малую массу, габариты и стоимость. Режим работы – повторно – кратковременный. Наиболее распространен привод с реверсированием исполнительного эл. двигателя и регулированием его частоты вращения в широких пределах.
Системы управления судовыми грузоподъемными механизмами с электроприводом делятся на системы с непосредственным управлением – контроллерные, системы с дистанционным управлением – релейно-контакторные и выполненные по принципу Г – Д, системы с централизованными постами управления всем комплексом погрузки и разгрузки. В зависимости от рода тока грузоподъемные механизмы выполняют с эл. двигателем постоянного или переменного тока.
В качестве исполнительного двигателя применяют двигатели постоянного тока смешанного возбуждения, независимого возбуждения (схема Г – Д), короткозамкнутые асинхронные многоскоростные двигатели.
Развитие систем управления характеризуется наличием нескольких уровней автоматизации. Первый уровень – системы с непосредственным управлением (контроллерные). Второй уровень – системы дистанционного управления с обратной связью. Третий уровень предусматривает применение централизованных постов, систем управления группой взаимосвязанных судовых подъемных механизмов, использование ЭВМ с целью управления всем комплексом погрузки – разгрузки без участия оператора.
Литература
| 1. | Чекунов К.А. «Судовые электроприводы и электродвижение судов» Л., Судостроение, 1986 |
| 2. | Токарев П.М. «Судовые электрические приборы управления.» М.: Транспорт. 1988. |
| 3. | Сухарев Е.М. Судовые электрические станции и их эксплуатация. Л., Судостроение, 1986. |
| 4. | А.А.Турбаков. Электротехника и электрооборудование судов. М. Транспорт 1965 |
| 5. | Горелейченко А.В. «Судовые электроизмерительные приборы» М. Транспорт 1974 |
| 6. | Яковлев Г.С. «Судовые электроэнергетические устройства», Л., Судостроение, 1967. |
| 7. | Акулов В.П., Бабаев А.М., Белькевич А.И. Судовые электросети и приборы управления. -Л.: Судостроение, 1970. |
| 8. | Фесенко В.И. «Электрооборудование промысловых судов» Л.Судостроение,1992. |
| 9. | Быковский Ю.И., Шеинцев Е.А. «Электрооборудование судов рыбной промышленности».Л. Cудостроение,1976. |
| 10. | Кацман М.М., «Электрические машины». М. Высшая школа, 2002. |
| 11. | Пиотровский Л.М. «Электрические машины» Л. Энергия ,1975. |
| 12. | Хомяков Н.М., Денисов В.В. «Электрооборудование и электродвижение судов» Л. Судостроение, 1969 |
Общие сведения по судовому электрооборудованию
Судовое электрооборудование размещается в помещениях, которые согласно Правилам Регистра РФ делятся на сухие, с повышенной влажностью, влажные, особо сырые, заливаемые водой, затопляемые, опасные и взрывоопасные.
К сухим помещениям относятся общественные, жилые, закрытые помещения, рулевые, штурманские, радио- и трансляционные рубки, специальные электротехнические помещения и ряд других служебных помещений, а также относящиеся к ним коридоры, вестибюли, тамбуры и трапы.
Помещения с повышенной влажностью — это помещения аварийных дизель-генераторов и пожарных насосов, а также машинные и котельные отделения, умывальные, туалетные, уборные, сушильные, камбузы, провизионные кладовые и т. п.
Влажные помещения — кладовые шкиперского имущества, запчастей, фонарные, малярные, а также тамбуры и коридоры, примыкающие к этим помещениям.
Особо сырые помещения — помещения по обработке продуктов промысла и лова, грузовые трюмы, не предназначенные для перевозки и хранения сухого и жидкого топлива, а также легковоспламеняющихся грузов, рефрижераторные трюмы и кладовые, бани, душевые, ванные, прачечные, посудомоечные и заготовительные.
К заливаемым водой помещениям относятся открытые палубы.
К затопляемым относятся помещения и пространства, в которых электрооборудование должно работать под водой.
К опасным относятся помещения и пространства, где имеется горючая пыль, концентрация которой взрывоопасна.
Взрывоопасные помещения на судах делятся на три категории.
К первой категории относятся отсеки и цистерны для воспламеняющихся жидкостей с температурой вспышки паров ниже 60 °С и сжиженных газов, а также грузовые трюмы, предназначенные для перевозки таких жидкостей и газов в специальной таре. К ним же относятся помещения, смежные с этими отсеками, которые не отделены от них коффердамами и не имеют принудительной вентиляции.
Ко второй категории относятся помещения и пространства, в которых могут образоваться скопления воспламеняющихся газов во взрывоопасной концентрации (насосные отделения, компрессорные помещения для сжиженных газов, аккумуляторные помещения, фонарные и малярные кладовые, грузовые трюмы для перевозки угля и т. п.).
К третьей категории относятся трюмы и помещения, в которых возможно образование воспламеняющейся смеси пыли или волокон с воздухом.
Корпуса электрооборудования в зависимости от условий размещения имеют различные степени защиты.
Условное обозначение степени защиты содержит следующие данные:
а) буквы IP;
б) цифровое обозначение степени защиты персонала от соприкосновения с токоведущими или движущимися частями электрооборудования, а также защиты электрооборудования от случайного попадания внутрь посторонних твердых тел;
в) цифровое обозначение степени защиты электрооборудования от попадания внутрь корпуса воды.
Степень защиты от соприкосновения с токоведущими или движущимися частями и от случайного попадания внутрь электрооборудования посторонних твердых тел характеризуется следующим образом:
0 — защита отсутствует;
1 — обеспечивается защита от случайного соприкосновения большого участка поверхности человеческого тела с токоведущими или движущимися частями (защита от преднамеренного доступа к этим частям отсутствует), а также от попадания крупных посторонних твердых тел диаметром не менее 52,5 мм;
2 — предусмотрена защита от соприкосновения пальцев с токоведущими или движущимися частями, а также от попадания твердых тел диаметром не менее 2,5 мм;
3 — обеспечены защита от соприкосновения инструмента, проволоки или аналогичных предметов толщиной более 2,5 мм с токоведущими или движущимися частями, а также защита от попадания тел диаметром не менее 2,5 мм;
4 — предусмотрены защита от соприкосновения инструмента, проволоки или других подобных предметов толщиной более 1 мм с токоведущими или движущимися частями, а также защита от попадания твердых тел толщиной не менее 1 мм;
5 — обеспечены полная защита персонала от соприкосновения с токоведущими или движущимися частями и полная защита электрооборудования от вредных отложений пыли;
6 — гарантированы полная защита персонала от соприкосновения с токоведущими или движущимися частями и полная защита электрооборудования от попадания пыли.
Степень защиты от проникновения воды внутрь корпуса электрооборудования характеризуется следующим образом:
0 — защита отсутствует;
1 —обеспечена защита от капель конденсированной воды, вертикально падающих на корпус;
2 — предусмотрена защита от капель воды, падающих на корпус, наклоненный под углом не более 15° к вертикали;
3 — обеспечена защита от дождя, падающего под углом не более 60° к вертикали;
4 — гарантирована защита от брызг воды, падающих на корпус в любом направлении;
5 — предусмотрена защита от водяной струи, падающей на корпус в любом направлении;
6 — обеспечена защита электрооборудования, расположенного на палубе судна при захлестывании морской волной;
7 — гарантирована защита при погружении в воду, которая при давлении, указанном в стандартах или технических условиях на отдельные виды электрооборудования, не должна проникать внутрь корпуса в течение неограниченно длительного времени.
Рекомендуемые степени защиты электрооборудования указаны в табл. 5.
Таблица 5.
| Степень защиты персонала от прикосновения к токоведущмм или; движущимся частям: и защиты электрооборудования от попадания посторонних тел | Степень защиты от проникновения воды | ||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
| 0 | 1Р00 | 1Р01 | |||||||
| 1 | 1Р10 | 1Р11 | 1Р12 | 1Р13 | |||||
| 2 | 1Р20 | 1Р21 | 1Р22 | 1Р23 | — | — | — | ||
| 3 | 1Р30 | 1Р31 | 1Р32 | 1РЗЗ | 1РЗ4 | — | — | — | — |
| 4 | 1Р40 | 1Р41 | 1Р42 | 1Р43 | 1Р44 | — | — | — | |
| 5 | 1Р50 | 1Р51 | 1Р54 | 1Р55 | 1Р56 | — | — | ||
| 6 | 1Р60 | — | — | 1Р65 | 1Р66 | 1Р67 | 1Р68 | ||
Исполнение электрооборудования определяется характеристикой помещения, в котором оно установлено. В сухих помещениях может устанавливаться оборудование в исполнениях IP20 или IP30 (в каютах, салонах), а также IP22 (в рулевых, штурманских рубках и т. п.). В сухих специальных помещениях допускается установка электрооборудования в исполнении IP10.
В помещениях с повышенной влажностью и влажных помещениях устанавливается электрооборудование в исполнении IP23. В умывальных и туалетных комнатах, а также в уборных, раздевальных, на камбузах и в сушильных помещениях должно устанавливаться электрооборудование в исполнении IP44. В особо сырых помещениях устанавливается электрооборудование в исполнении IP55, в заливаемых водой — IP56, а в затопляемых и опасных помещениях — IP68.
Во взрывоопасных помещениях первой категории не допускается установка электрооборудования за исключением датчиков уровня и температуры в искробезопасном исполнении, а также вибраторов эхолотов и устройств сигнализации обнаружения пожара во взрывозащищенном исполнении (последнее-в грузовых трюмах).
Во взрывоопасных помещениях и пространствах второй категории допускается устанавливать светильники и устройства сигнализации обнаружения пожара во взрывозащищенном исполнении, вибраторы эхолота, электроприводы вентиляторов насосных отделений во взрывозащищенном исполнении при условии размещения их в хорошо вентилируемых и газонепроницаемых выгородках, расположенных внутри насосного помещения, электродвигатели вентиляторов малярных и фонарных кладовых во взрывозащищенном исполнении.
Во взрывоопасных помещениях третьей категории допускается установка электрооборудования в исполнении не ниже IP65.
На судах, предназначенных для постоянного базирования и плавания в тропических районах, должно устанавливаться оборудование в исполнении ТМ, которое обеспечивает надежную его работу при длительных неблагоприятных воздействиях высокой температуры и большой влажности окружающей среды, сильной солнечной радиации, брызг морской воды.
Основными параметрами электрических машин являются напряжение, сила тока, мощность, частота вращения, вращающий момент, КПД, частота переменного тока и коэффициент мощности. Номинальные значения указанных величин, за исключением вращающего момента, приводятся заводом-изготовителем на паспортной табличке, закрепленной на корпусе машины.
Электрические машины, применяемые на судах флота рыбной промышленности, могут иметь естественное или искусственное охлаждение. В первом случае охлаждение осуществляется без специальных устройств, во втором — с использованием вентиляторов, насаженных непосредственно на вал машины (самовентиляция), или отдельных вентиляторов (независимое охлаждение). При независимом охлаждении система может быть замкнутой (без забора воздуха из окружающей среды) или разомкнутой (с забором воздуха из окружающей среды).
По роду тока применяемые машины делятся на машины постоянного и переменного тока. В соответствии с расположением вала на судах они могут быть горизонтального и вертикального исполнения.
Дата: 2019-07-30, просмотров: 870.