При запуске ГКУ-5 (рис. 3) переключатель режимов на пульте оператора ПО-3 должен стоять в положении «ГК». При нажатии кнопки «Пуск» на этом приборе в блок питания в приборе БЭ-3 подаётся ток = 24 В. Из пульта оператора ПО-3 в зависимости от положения переключателя «Скорость» в плату формирования скорости и температуры ПФС прибора БЭ-3 поступают команды:
- «Ручн.», при которой широта со знаком и скорость вводятся вручную с прибора ПО-3;
- «Лаг», при которой широта и знак широты вводятся вручную, а скорость поступает от лага;
- «СНС» (поступает также в плату согласования приёмника СНС с ГКУ-5) , при которой широта со знаком и скорость поступают от приёмника СНС (из НК).
Индикатор «Лаг/СНС» прибора ПО-3 загорается по командам «Лаг» или «СНС».
Также, с переключателей «Скорость» и «Широта» прибора ПО-3 в ручном режиме, поступают:
- в плату управления ДНГ ПУ прибора БЭ-3 аналоговая скорость корабля;
- в плату ПФС прибора БЭ-3 широта корабля в виде sin  и cos .
и cos .
С переключателя «Север - Юг» прибора ПО-3 в плату ПФС прибора БЭ-3 поступают команды «  », «
», «  », в зависимости от знака широты.
», в зависимости от знака широты.
После пуска блок питания начинает вырабатывать постоянные токи с напряжениями +19 В, -19 В, +15 В, -15 В, +8 В, +5 В, переменные прямоугольные токи с напряжениями 24 В и 13 В, а также переменный синусоидальный ток 480 Гц 10 В для питания СКТ-260.
 |
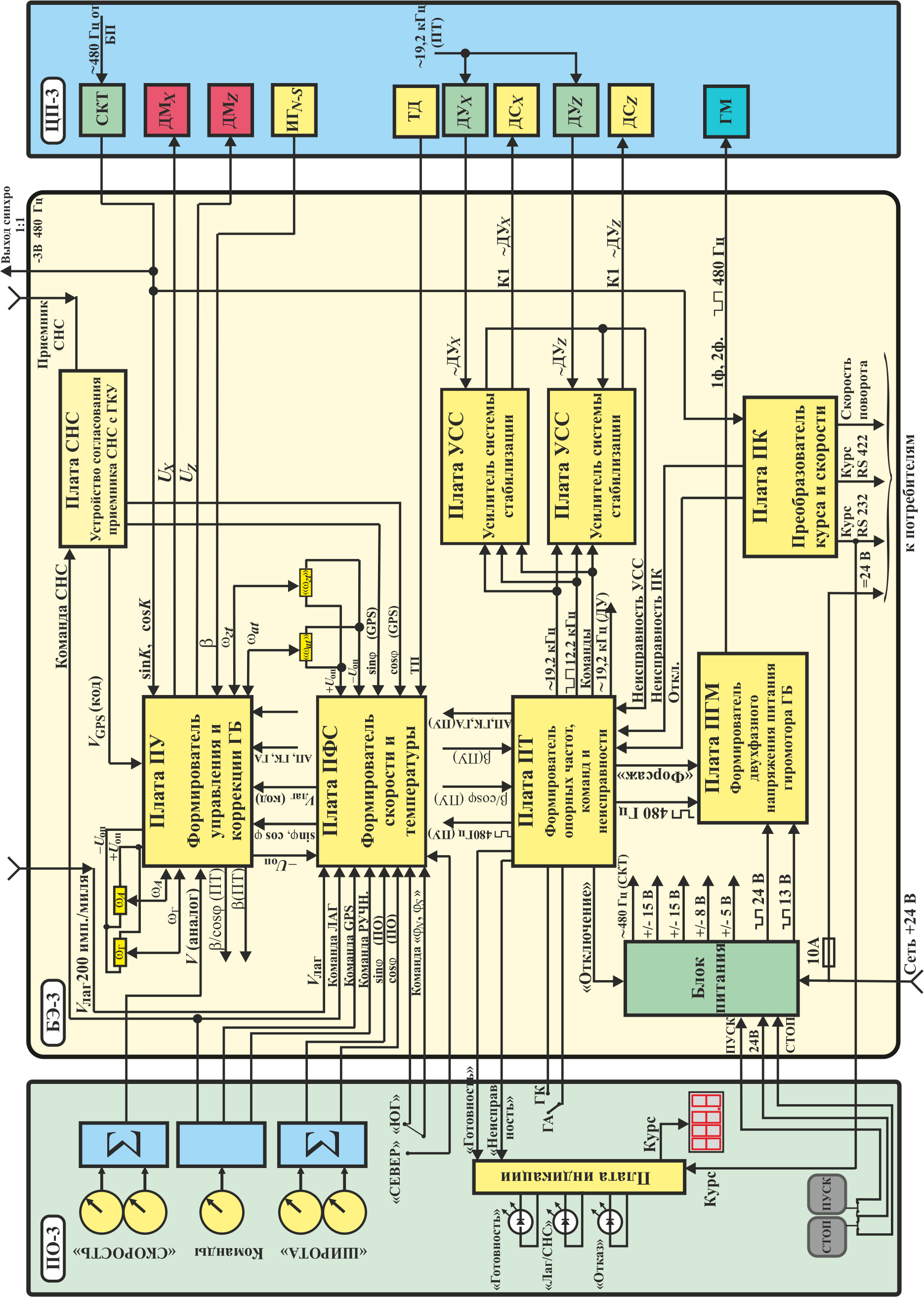
Переменные прямоугольные токи с напряжениями 24 В и 13 В поступают из блока питания в плату питания гиромотора ПГМ, где формируется переменный двухфазный прямоугольный ток частотой 480 Гц, напряжением 10В (22 В для форсированного режима в течение 68 с после пуска) для питания гиромотора, который является синхронным электромотором.
Плата таймера ПТ формирует:
- переменный синусоидальный ток частотой 19,2 кГц, напряжением 2,5 В, который поступает в датчики угла ДУX и ДУZ;
- переменный прямоугольный ток частотой 19,2 кГц, напряжением 2,5 В, который поступает в платы-усилители систем стабилизации УСС;
- переменный прямоугольный ток частотой 2,8 кГц, напряжением 5,0 В, который поступает в платы УСС;
- переменный прямоугольный ток частотой 480 Гц, напряжением 5,0 В, который поступает в платы ПУ и ПГМ;
- команду «Форсаж» для плат ПГМ и УСС. По истечении 68 секунд после пуска команда снимается;
- команду «Подготовка» для плат УСС, которая отключает следящие системы до команды «ГА»;
- команды «ГА», «АП», «ГК» для платы ПУ, которые переключают ГКУ-5 в соответствующие режимы в зависимости от величины сигналов β и  , поступающих из платы ПУ в плату ПТ, а также времени, прошедшего после пуска. «ГА» (горизонтирование) – поступает после разгона гиромотора через 68 с после включения ГКУ-5. «АП» (автоприведение в плоскость меридиана)– поступает через 6 мин 37 с после включения ГКУ-5. «ГК» (гирокомпас) – поступает через 18 мин 24 с после включения ГКУ-5, если в течение 8 минут до этого величина
, поступающих из платы ПУ в плату ПТ, а также времени, прошедшего после пуска. «ГА» (горизонтирование) – поступает после разгона гиромотора через 68 с после включения ГКУ-5. «АП» (автоприведение в плоскость меридиана)– поступает через 6 мин 37 с после включения ГКУ-5. «ГК» (гирокомпас) – поступает через 18 мин 24 с после включения ГКУ-5, если в течение 8 минут до этого величина  не превышала порог, равный 250 мВ;
не превышала порог, равный 250 мВ;
- сигналы «Готовность» и «Отказ» для платы индикации прибора ПО-3. Сигнал «Готовность» выдаётся, если угол α не превышает 1°. Сигнал «Отказ» выдаётся при неисправностях в схеме ГКУ-5.
В плату ПТ из плат УСС и платы курса и скорости циркуляции корабля ПКС поступают сигналы о неисправностях плат УСС и ПКС. Если скорость отработки следящей системы курса в ГКУ-5 превышает 30 град/с, то плата ПКС формирует сигнал отключения ГКУ-5, который поступает в плату ПТ, а затем в блок питания, который обесточивает схему ГКУ-5.
В платы УСС из прибора ЦП-3 с датчиков угла ДУX и ДУZ ДНГ поступают сигналы, пропорциональные углам рассогласования платформы с ротором ДНГ. После усиления из плат УСС эти сигналы передаются снова в прибор ЦП-3 на двигатели стабилизации ДСX и ДСZ, которые согласовывают платформу с ротором ДНГ.
Кроме указанных ранее команд и сигналов в плату ПФС поступают:
- в режиме «СНС» - широта корабля в виде sinj и cosj из платы СНС;
- в режиме «Лаг» - скорость корабля VЛАГ из лага;
- сигнал температуры платформы ТП от датчика температуры ТД, который участвует в формировании сигналов компенсации температурных дрейфов ДНГ.
Из платы ПФС в плату ПУ передаются сигналы sinj и cosj, а также VЛАГ в коде. Кроме указанных ранее команд и сигналов в плату ПУ поступают:
- в режиме «СНС» скорость корабля VСНС в коде из платы СНС;
- сигнал, пропорциональный углу β с индикатора горизонта прибора ЦП-3;
- сигналы sinК и cosК с датчика курса СКТ-260 прибора ЦП-3.
На регулируемые вручную переменные резисторы, вырабатывающие уходы  и
и  из платы ПФС поступает опорное напряжение UОП. С резисторов снимаются сигналы и , которые поступают в плату ПУ. В режиме ГК плата ПТ выдаёт на датчик момента ДМX ДНГ прибора ЦП-3 сигнал
из платы ПФС поступает опорное напряжение UОП. С резисторов снимаются сигналы и , которые поступают в плату ПУ. В режиме ГК плата ПТ выдаёт на датчик момента ДМX ДНГ прибора ЦП-3 сигнал  , а на датчик момента ДМZ ДНГ - сигнал
, а на датчик момента ДМZ ДНГ - сигнал  . В режиме ГА составляющая
. В режиме ГА составляющая  сигнала
сигнала  отсутствует. В результате создания датчиками моментов управляющих и корректирующих моментов ДНГ будет находиться в плоскостях меридиана и горизонта. Датчик курса СКТ-260 вырабатывает аналоговый сигнал курса и передаёт его в плату курса и скорости поворота корабля (в случае заказа этой функции на заводе-изготовителе) ПКС. Плата ПКС передаёт аналоговый и цифровой сигналы курса и скорости циркуляции корабля потребителям и в плату индикации прибора ПО-3. Из платы индикации сигнал курса поступает на индикатор курса прибора ПО-3.
отсутствует. В результате создания датчиками моментов управляющих и корректирующих моментов ДНГ будет находиться в плоскостях меридиана и горизонта. Датчик курса СКТ-260 вырабатывает аналоговый сигнал курса и передаёт его в плату курса и скорости поворота корабля (в случае заказа этой функции на заводе-изготовителе) ПКС. Плата ПКС передаёт аналоговый и цифровой сигналы курса и скорости циркуляции корабля потребителям и в плату индикации прибора ПО-3. Из платы индикации сигнал курса поступает на индикатор курса прибора ПО-3.
Дата: 2019-07-31, просмотров: 546.