Режима «ГИРОКОМПАС»
Управление ДНГ преследует цель обеспечить его необходимое положение относительно географической горизонтной системы координат (ГГСК). Управление ДНГ осуществляется двумя каналами управления, горизонтальным и вертикальным. Горизонтальный канал управления создаёт управляющие и корректирующие моменты, направленные вдоль оси Z ротора, а вертикальный канал управления – моменты, направленные вдоль оси X ротора. Для выработки курса главная ось Y ротора должна совпадать с плоскостями меридиана и горизонта. После подачи питания и, при установленном режиме работы «ГК», решается задача приведения оси Y в эти плоскости. В ГКУ-5 эта задача полностью автоматизирована. Её выполнение осуществляется в несколько этапов. Вначале происходит форсированный разгон ротора до рабочих оборотов. Затем, через 68 секунд после подачи электропитания, включается режим горизонтирования, т. е. приведения в плоскость горизонта главной оси Y. Это осуществляется по команде «ГА» из прибора БЭ-3. Система стабилизации платформы (следящая система) ГКУ-5, которая согласовывает платформу с ротором ДНГ по углам αп и βп отключена до момента начала приведения ротора в плоскость меридиана (автоприведения). В работе системы стабилизации ГКУ-5, имеется важное отличие от подобной системы в ГКУ-1 [1], в которой и согласование следящего элемента с гироскопом и управление самим гироскопом, осуществляется путём подачи сигналов на одни и те же двигатели стабилизации. В ГКУ-5 эти цепи разделены. Управление гироскопом осуществляется путём подачи сигналов на датчики моментов ДМX и ДМZ, а согласование положения платформы с ротором ДНГ - путём подачи сигналов на двигатели стабилизации ДСX и ДСZ.
В ГКУ-5 датчик момента, расположенный вдоль горизонтальной оси X обозначается как ДМX, но создаёт моменты, направленные вдоль оси Z, а датчик момента расположенный вдоль вертикальной оси Z обозначается как ДМZ, но создаёт моменты, направленные вдоль оси X. Канал управления, связанный с ДМX называется горизонтальным, а связанный с ДМZ - вертикальным.
Управление ротором ДНГ осуществляется по сигналу с индикатора горизонта ИГ, расположенного на платформе (рис. 2) и делится на несколько этапов. Во время первого этапа - горизонтирования, по команде «ГА» из прибора БЭ-3, сигнал с индикатора горизонта Uβ = kигβс, где kиг – коэффициент, зависящий от свойств индикатора горизонта, пропорциональный углу βс, пройдя усиление и преобразование в приборе БЭ-3, поступает только в горизонтальный канал управления на датчик момента ДМX, который создаёт момент горизонтирования вдоль оси Z:
 (2.1)
(2.1)
где  – общий коэффициент горизонтального канала, который зависит от свойств индикатора горизонта, цифро-аналогового преобразователя, усилителей и датчика момента горизонтального канала.
– общий коэффициент горизонтального канала, который зависит от свойств индикатора горизонта, цифро-аналогового преобразователя, усилителей и датчика момента горизонтального канала.
В режиме горизонтирования коэффициент увеличивается для создания большего, по сравнению с основными режимами, момента вдоль оси Z. Кроме того, на датчик момента ДМX поступает сигнал коррекции:
 (2.2)
(2.2)
где  - коэффициент цепи управления горизонтального канала, который зависит от свойств цифро-аналогового преобразователя, усилителей и датчика момента горизонтального канала.
- коэффициент цепи управления горизонтального канала, который зависит от свойств цифро-аналогового преобразователя, усилителей и датчика момента горизонтального канала.
Этот сигнал формируется в приборе БЭ-3. Момент коррекции горизонтального канала управления равен:
 . (2.3)
. (2.3)
Составляющими данного момента коррекции являются:
−  - момент коррекции скоростной погрешности ГКУ-5 в режиме ГК [2];
- момент коррекции скоростной погрешности ГКУ-5 в режиме ГК [2];
- - момент компенсации горизонтного дрейфа гироскопа от плоскости горизонта;
− - момент компенсации температурного горизонтного дрейфа гироскопа от плоскости горизонта;
Общий момент, создаваемый вдоль оси Z равен:
 . (2.4)
. (2.4)
В вертикальном канале управления датчик момента ДМZ отключён до момента начала второго этапа - автоприведения ротора ДНГ в плоскость меридиана и не создаёт никаких моментов.
После окончания горизонтирования (через 267 с после включения ГКУ-5) снимается команда «ГА» и выдаётся команда «АП» («Автоприведение»), т. е. начинается автоприведение гироскопа в плоскость меридиана. По этой команде ДНГ управляется, как гироскоп короткопериодного (для ускорения процесса автоприведения) гирокомпаса, а сигнал с индикатора горизонта подаётся в оба канала управления (в вертикальном канале управления включается датчик момента ДМZ). Только для вертикального канала управления этот сигнал делится в приборе БЭ-3 на cos  и, в виде , поступает на датчик момента ДМZ, который создаёт приводящий (аналог управляющего в ГКУ-1) [1] момент вдоль оси X:
и, в виде , поступает на датчик момента ДМZ, который создаёт приводящий (аналог управляющего в ГКУ-1) [1] момент вдоль оси X:
 (2.5)
(2.5)
где  – общий коэффициент вертикального канала, который зависит от свойств индикатора горизонта, цифро-аналогового преобразователя, усилителей и датчика момента горизонтального канала, он увеличивается при автоприведении по сравнению с основными режимами.
– общий коэффициент вертикального канала, который зависит от свойств индикатора горизонта, цифро-аналогового преобразователя, усилителей и датчика момента горизонтального канала, он увеличивается при автоприведении по сравнению с основными режимами.
Угол  делится на cos для регулировки приводящего момента в зависимости от широты. Это даёт возможность увеличивать приводящий момент с увеличением широты и поддерживать постоянным, независимо от широты, период незатухающих колебаний ДНГ (подробно в разд. 2.2), а также преобразовывает закон изменения широтной погрешности.
делится на cos для регулировки приводящего момента в зависимости от широты. Это даёт возможность увеличивать приводящий момент с увеличением широты и поддерживать постоянным, независимо от широты, период незатухающих колебаний ДНГ (подробно в разд. 2.2), а также преобразовывает закон изменения широтной погрешности.
Кроме того, датчик момента ДМZ создаёт момент коррекции  :
:
 . (2.6)
. (2.6)
Этот момент создаётся по сигналу коррекции:
 , (2.7)
, (2.7)
который формируется в приборе БЭ-3. Составляющая момента коррекции  служит для коррекции широтной погрешности ГКУ-5 в режиме ГК [2]. Другие составляющие H
служит для коррекции широтной погрешности ГКУ-5 в режиме ГК [2]. Другие составляющие H  и
и  служат для компенсации азимутального и температурного азимутального дрейфа гироскопа от плоскости меридиана, соответственно.
служат для компенсации азимутального и температурного азимутального дрейфа гироскопа от плоскости меридиана, соответственно.
Общий момент, создаваемый вдоль оси X равен:
 +
+  =
=  . (2.8)
. (2.8)
В горизонтальном канале управления по команде «АП» изменяется коэффициент управления  , и, вместо момента горизонтирования
, и, вместо момента горизонтирования  , формируется демпфирующий момент вдоль оси Z:
, формируется демпфирующий момент вдоль оси Z:
 . (2.9)
. (2.9)
Рассмотрим, какое движение будет совершать главная ось Y ДНГ относительно плоскостей меридиана и горизонта по углам α и β на корабле, движущемся постоянными курсом и скоростью под действием только приводящего и демпфирующего моментов. Для этого воспользуемся уравнениями абсолютного прецессионного движения гироскопов, [2]. В выражения для углов α и β подставим значения приводящего и демпфирующего моментов, получим:
 (2.10)
(2.10)
Не выясняя характер и траекторию этого движения, определим, вначале, координаты положения равновесия ДНГ. Углы α и β, относящиеся к ротору ДНГ, можно считать равными углам, относящимся к платформе αп и  . В положении равновесия углы α и β являются равновесными углами αr и βr, которые не меняются, то есть . При этом из (2.10) получим:
. В положении равновесия углы α и β являются равновесными углами αr и βr, которые не меняются, то есть . При этом из (2.10) получим:
 (2.11)
(2.11)
 (2.12)
(2.12)
Из формул (2.11) и (2.12) видно, что в положении равновесия, под действием только моментов управления, ДНГ не находится ни в плоскости меридиана, ни в плоскости горизонта. Наиболее важным является угол αr, так как он определяет отклонение ДНГ от плоскости меридиана и, следовательно, является погрешностью курса ГКУ-5, в данном случае. Из формулы (2.12) видно, что эта погрешность имеет две составляющие. Первая называется широтной погрешностью и определяется как:
 . (2.13)
. (2.13)
Из (2.13) видно, что по сравнению с широтной погрешностью ГКУ-1 [2], у ГКУ-5 она имеет не тангенциальный, а синусоидальный закон изменения.
Вторая составляющая называется скоростной погрешностью и определяется как:
 . (2.14)
. (2.14)
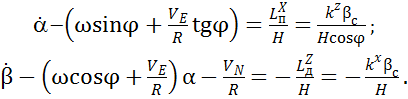
В ГКУ-5, для компенсации широтной и скоростной погрешностей, применяется способ коррекции положения гироскопа относительно плоскости меридиана. Для этих целей, в числе других, и создаются моменты коррекции и  в режиме ГК. С их учётом, дифференциальные уравнения движения ДНГ относительно плоскостей меридиана и горизонта по углам α и β на корабле, движущемся постоянными курсом и скоростью (2.10), будут иметь вид:
в режиме ГК. С их учётом, дифференциальные уравнения движения ДНГ относительно плоскостей меридиана и горизонта по углам α и β на корабле, движущемся постоянными курсом и скоростью (2.10), будут иметь вид:

 ; (2.15)
; (2.15)

(2.16)
Из уравнения (2.15) можно определить, что в положении равновесия, когда


и при = 0,
равновесный угол 
Из уравнения (2.16) можно определить, при тех же условиях, что  , т. е.
, т. е.  и
и  . Таким образом, моменты широтной
. Таким образом, моменты широтной  и скоростной коррекции в режиме ГК устраняют широтную и скоростную погрешности ГКУ-5.
и скоростной коррекции в режиме ГК устраняют широтную и скоростную погрешности ГКУ-5.
Решения дифференциальных уравнений (2.15) и (2.16), т.е. законы изменения углов  и
и  будут иметь вид [2]:
будут иметь вид [2]:
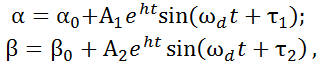 (2.17)
(2.17)
| где | 
| - начальное отклонение от меридиана; |

| - начальное отклонение от горизонта; | |
| А1 | - начальная амплитуда колебаний по углу a; | |
| А2 | - начальная амплитуда колебаний по углу β; | |

| - -круговая частота затухающих колебаний по углам a и β; | |

| – начальная фаза колебаний по углу a; | |

| – начальная фаза колебаний по углу β; | |
| h | - коэффициент затухания колебаний по углам a и β; | |
| t | - текущее время с момента начала работы ГКУ-5. |
Из (2.17) следует, что если в начальный момент ДНГ был отклонен от плоскости меридиана на угол  , а от плоскости горизонта на угол , то он начнет движение к этим плоскостям, которое будет являться периодическим (колебательным) и затухающим, траекторией которого относительно ГГСК является сходящаяся логарифмическая спираль. Для того чтобы колебания были затухающими, коэффициент затухания h должен быть отрицательным. При этом должен выполняться критерий Гурвица [6], который для ГКУ-5 сводится к следующему соотношению
, а от плоскости горизонта на угол , то он начнет движение к этим плоскостям, которое будет являться периодическим (колебательным) и затухающим, траекторией которого относительно ГГСК является сходящаяся логарифмическая спираль. Для того чтобы колебания были затухающими, коэффициент затухания h должен быть отрицательным. При этом должен выполняться критерий Гурвица [6], который для ГКУ-5 сводится к следующему соотношению
 (2.18)
(2.18)
где  – коэффициент демпфирования колебаний маятника в индикаторе горизонта;
– коэффициент демпфирования колебаний маятника в индикаторе горизонта;
c – коэффициент упругости подвеса маятника индикатора горизонта.
Критерий Гурвица определяет соотношение способностей к затуханию колебаний у маятника индикатора горизонта (левая часть) и гироскопа ДНГ (правая часть) и показывает, что способность к затуханию колебаний у гироскопа должна быть больше. Основным источником колебаний ротора ДНГ является маятник ИГ. Его колебания через систему управления гироскопом передаются ротору ДНГ, а через систему стабилизации – платформе, а значит – гироблоку в целом. За счёт подбора коэффициентов цепей управления гироскопом  и можно изменять параметры колебаний ротора ДНГ.
и можно изменять параметры колебаний ротора ДНГ.
Оба колебательных движения ротора ДНГ по углам α и β происходят с одинаковым периодом затухающих колебаний Td [2]:
 (2.19)
(2.19)
Если представить приводящий момент в виде  , то период собственных (незатухающих) колебаний ДНГ T0 при отключённом демпфировании,
, то период собственных (незатухающих) колебаний ДНГ T0 при отключённом демпфировании,
без учёта малой величины  , равен:
, равен:
T0 =  2
2  = 2
= 2  (2.20)
(2.20)
где  – частота собственных колебаний ДНГ.
– частота собственных колебаний ДНГ.
Из (2.20) видно, что период собственных (незатухающих) колебаний ДНГ и гироблока за счёт деления сигнала ИГ на  , не зависит от широты корабля.
, не зависит от широты корабля.
Во время автоприведения по команде «АП» увеличивается (по сравнению с основными режимами) коэффициент управления вертикального канала  , что приводит к уменьшению периодов незатухающих и затухающих колебаний ДНГ. ГКУ-5 становится короткопериодным гирокомпасом, что сокращает время приведения его в меридиан. Однако, при этом, период незатухающих колебаний ДНГ не соответствует периоду Шулера, что будет источником инерционных погрешностей при маневрировании и качке корабля, [2]. Поэтому запуск ГКУ-5 желательно производить на ошвартованном в базе корабле. Приведение ГКУ-5 в плоскость меридиана полностью автоматизировано. Через 18 мин 24 с после включения ГКУ-5, в приборе БЭ-3 начинается сравнение сигнала b/cosj с величиной «Uпорог.1» = 250 мВ и, если, величина сигнала b/cosj не превышает значения «Uпорог.1», то в приборе БЭ-3 начинается отсчёт времени в течение 8 минут. Если за это время указанный сигнал не превысит значение «Uпорог.1», что свидетельствует об окончании приведения ДНГ в плоскость меридиана (отклонение платформы от плоскости меридиана не превышает 1°), то снимается команда «АП», выдаётся команда «ГК» и формируется сигнал готовности в приборе ПО-3.
, что приводит к уменьшению периодов незатухающих и затухающих колебаний ДНГ. ГКУ-5 становится короткопериодным гирокомпасом, что сокращает время приведения его в меридиан. Однако, при этом, период незатухающих колебаний ДНГ не соответствует периоду Шулера, что будет источником инерционных погрешностей при маневрировании и качке корабля, [2]. Поэтому запуск ГКУ-5 желательно производить на ошвартованном в базе корабле. Приведение ГКУ-5 в плоскость меридиана полностью автоматизировано. Через 18 мин 24 с после включения ГКУ-5, в приборе БЭ-3 начинается сравнение сигнала b/cosj с величиной «Uпорог.1» = 250 мВ и, если, величина сигнала b/cosj не превышает значения «Uпорог.1», то в приборе БЭ-3 начинается отсчёт времени в течение 8 минут. Если за это время указанный сигнал не превысит значение «Uпорог.1», что свидетельствует об окончании приведения ДНГ в плоскость меридиана (отклонение платформы от плоскости меридиана не превышает 1°), то снимается команда «АП», выдаётся команда «ГК» и формируется сигнал готовности в приборе ПО-3.
2.2. Работа ГКУ-5 в режиме «ГИРОКОМПАС»
После приведения в меридиан ГКУ-5 автоматически переключается в основной режим ходового гирокомпаса с периодом незатухающих колебаний равным периоду Шулера, за счёт уменьшения коэффициента управления вертикального канала . Через 2,5 часа после включения ГКУ-5 точность работы достигнет нормированных величин. Этот режим используется при плавании корабля в широтах до 85°N(S). В этом режиме коэффициент управления вертикального канала принимает основное рабочее значение, меньшее, по сравнению с режимом автоприведения. В остальном управление ДНГ в основном режиме «ГК» ничем не отличается от управления им в подготовительном режиме по команде «АП». Управление гироскопом осуществляется посредством приводящего и демпфирующего моментов, а коррекция положения – посредством моментов широтной и скоростной коррекции. Также производится компенсация азимутального, горизонтного и температурных дрейфов. Во время маневрирования ГКУ-5 продолжает работать в режиме ГК, поэтому период незатухающих колебаний ДНГ должен быть равен периоду Шулера. Из (2.20) следует, что у ГКУ-5 период незатухающих колебаний не зависит от широты. Если ГКУ-5 настроить на период Шулера в расчётной широте, то он будет сохранять эту настройку в любой другой широте. Эта настройка может быть произведена путём подбора соответствующего коэффициента цепи управления. Приравнивая (2.20) к значению периода Шулера [2], можно получить необходимое значение коэффициента цепи управления
2  ,
,
отсюда:
 . (2.21)
. (2.21)
По формуле (2.21) рассчитывается коэффициент цепи управления вертикального канала для расчётной широты.
Исходя из недокументированных сведений можно предположить, что при превышении сигнала b/cosj величины «Uпорог.2» =
= 1,0 В (вероятно, что отклонение главной оси гироблока от меридиана при этом составляет 4°) выдаётся команда «АП» и ГКУ-5 начинает приходить в меридиан в режиме короткопериодного ГК. В дальнейшем ГКУ-5 будет работать по алгоритму, описанному в 2.1.
Дата: 2019-07-31, просмотров: 533.