В в е д е н и е
В настоящее время продолжается совершенствование гироскопических курсоуказателей для ВМФ РФ. Их развитие происходит по пути применения новых типов чувствительных элементов (гироскопов и акселерометров), новой электронной и электромеханической базы, что приводит к снижению весогабаритных характеристик и потребления электроэнергии, упрощению правил использования и технического обслуживания. К перспективным двухрежимным гирокурсоуказателям относится ГКУ-5, который устанавливается практически на всех строящихся и модернизируемых кораблях и судах ВМФ в качестве основного или резервного курсоуказателя.
В ГКУ-5 применен динамически настраиваемый гироскоп (ДНГ) ГВК-6, который имеет средние точностные характеристики, малый вес и габариты, не требует высокоточной системы термостабилизации и имеет высокую устойчивость к механическим и климатическим воздействиям. Такой гироскоп имеет внутренний упругий подвес, а значит его динамическая характеристика - скорость собственного вращения вокруг главной оси, должна быть настроена так, чтобы изгибы подвеса, обеспечивающие повороты гироскопа вокруг экваториальных осей, не приводили к дрейфам гироскопа от необходимого положения. Моменты инерции ГВК-6 малы, что способствует снижению потребления электроэнергии и возможности использования для его работы двухфазного тока. Управление гироскопом осуществляется с помощью маломощных электромагнитных датчиков момента.
Также, отличительными особенностями ГКУ-5 от прежних двухрежимных курсоуказателей является применение в системе стабилизации двигателей моментного типа и безредукторных следящих систем.
В ГКУ-5 установлен один акселерометр, работающий в режиме индикатора горизонта. Поэтому, отсутствует автоматический переход в режим гироазимута во время манёвра корабля. Положительным при этом является то, что ДНГ не теряет чувствительность к горизонту, как это происходит у ГКУ-1, когда суммарный сигнал двух индикаторов горизонта становится равным нулю. Так как, во время маневрирования, ГКУ-5 продолжает работать в режиме гирокомпаса (если вручную не переключён в режим гироазимута), то необходимо поддерживать его настройку на период Шулера в любой широте. Для этого в ГКУ-5 применён простой способ регулировки направляющего момента за счёт деления сигнала индикатора горизонта на косинус широты.
Для упрощения устройства в ГКУ-5 отсутствуют пороговое устройство, ограничивающее сигнал от индикатора горизонта во время манёвра и фильтр низкой частоты, ослабляющий влияние качки на сигналы управления гироскопом. Также, отсутствуют: схема интегральной коррекции для автоматического определения азимутального дрейфа гироскопа и все виды дрейфов можно определить только вручную, и блок стабилизации, предназначенный для повышения устойчивости следящих систем во время качки или при постоянном наклоне корабля.
Выработка курса в ГКУ-5 осуществляется в плоскости палубы, что приводит к наличию карданной погрешности, а гироазимутальный курс может вырабатываться только локсодромический, что не позволяет в высоких широтах отключить выработку величины, которая пропорциональна тангенсу широты. Также в ГКУ-5 не предусмотрена выработка квазигеографического курса.
Несмотря на указанные упрощения, ГКУ-5 полностью соответствует международным и российским требованиям и стандартам в области судовождения. Для штурманов кораблей и судов его основными достоинствами являются простота эксплуатации, возможность использования в сложных гидрометеорологических условиях под воздействием качки, наклонов, вибрации и ударов корпуса корабля. По своим точностным и временным параметрам, надёжности, ГКУ-5 не уступает другим гироскопическим курсоуказателям, находящимся на вооружении ВМФ РФ.
Настоящее учебно-методическое пособие базируется на документе «Гирокурсоуказатель ГКУ-5. Руководство по эксплуатации. ПИКВ. 461524. 003 РЭ-Э». В пособии рассмотрены вопросы принципа работы, устройства, причин возникновения и компенсации погрешностей, использования по назначению и технического обслуживания ГКУ-5. Пособие предназначено для курсантов и слушателей высших и средних военно-морских учебных заведений и может быть использовано офицерами БЧ-1 при освоении ими ГКУ-5.
Автор благодарит преподавателей цикла кораблевождения специального факультета подготовки иностранных экипажей ВУНЦ ВМФ «ВМА» за помощь в подготовке данного пособия.
Г л а в а 1. ОБЩИЕ СВЕДЕНИЯ
О ГИРОКУРСОУКАЗАТЕЛЕ ГКУ-5
Назначение ГКУ-5
Двухрежимный гирокурсоуказатель ГКУ-5 предназначен для определения географического курса и угловой скорости циркуляции корабля в режимах гирокомпаса или гироазимута.
ГКУ-5 используется при плавании в широтах от 0°до 85°N(S) в режиме гирокомпаса ГК и в широтах от 0°N(S)до 90°N(S) в режиме гироазимута ГА при скорости корабля до 70 уз в условиях:
- температуры окружающей среды от (-10)°С до +55°С (для пеленгаторных репитеров, пелорусов и пеленгаторов от (-40)°С до +65°С);
- давления от 600 мм рт. ст. до 1520 мм рт. ст;
- бортовой качки с амплитудой до 30° и периодом от 6 до 15 с;
- килевой качки с амплитудой до 10° и периодом от 6 до 15 с;
- рысканья с амплитудой до 5° и периодом от 6 до 15 с;
- постоянного крена и дифферента до 45°;
- колебания напряжения корабельной сети переменного тока в пределах 220±22 В, частоты в пределах 50±3 Гц и напряжения постоянного тока в пределах 19,2-31,2 В.
В режиме ГА ГКУ-5 может использоваться в любой широте при резкопеременном движении корабля (например, при выработке данных стрельбы) т. к. курс в этом режиме более устойчив к маневрированию, чем в режиме ГК. При этом погрешность курса ГКУ-5 будет нарастать с увеличением времени его использования в этом режиме.
В указанных условиях ГКУ-5 обеспечивает:
- определение курса от плоскости географического меридиана;
- дистанционную передачу курса аналоговым и цифровым приёмникам;
- дистанционную передачу информации об угловой скорости циркуляции корабля аналоговым приёмникам (при заказе данной функции на заводе-изготовителе);
- автоматический прием сигналов скорости и широты от спутниковой навигационной системы (от навигационного комплекса);
- автоматический прием сигнала скорости от лага;
- ручной ввод скорости и широты;
- дистанционное управление и контроль с единого пульта оператора.
ГКУ-5 выполняет свои функции и сохраняет свои параметры после воздействия следующих внешних факторов:
- предельной температуры воздуха от (-60)°С до +70°С;
- повышенной относительной влажности воздуха до 98 % при температуре +40°С;
- механического удара с пиковым ускорением до 147 м/с2 (15g) и длительностью импульса от 5 до 15 мс.
Технические данные ГКУ-5
1. Предельная (P = 0,95) погрешность курса в режиме ГК составляет:
- в диапазоне широт от 70°S до 70°N при скорости корабля до 70 узлов от ±0,3° (ошвартованный корабль на ровном киле на экваторе) до ±2,7° (любой режим движения корабля при допустимой качке);
- в диапазоне широт от 70° до 85° северной или южной широты при скорости корабля до 70 узлов ±3,0о (любой режим движения корабля при допустимой качке);
2. Увеличение предельной погрешности курса (азимутальный дрейф) в режиме ГА составляет:
- в диапазоне широт от 70°S до 70°N при скорости корабля до 70 уз от ±0,2°/ч (ошвартованный корабль на ровном киле) до ±0,5°/ч (любой режим движения корабля при допустимой качке);
- в диапазоне широт от 70° до 90° северной или южной широты при скорости корабля до 70 узлов от ±0,5°/ч (ошвартованный корабль на ровном киле) до ±1,0°/ч (любой режим движения корабля при допустимой качке);
- погрешности, вызванные конкретными причинами и суммарные погрешности, указаны в табл. 1.
Таблица 1
| Наименование погрешности | Значение в широтах, j | |
| j £ 70° | 70°< j < 90° | |
| 1 | 2 | 3 |
|
Режим ГК | ||
| 1.Установившаяся погрешность (с обратным знаком соответствует постоянной поправке на ошвартованном корабле при качке до 1°) | ±0,3° sесj | - |
| 2. Статическая погрешность в одном пуске (равна среднеквадратическому значению разностей между отдельными и средним значениями компасного пеленга на ориентир) | ±0,2° sесj | - |
| 3. Нестабильность установившейся погрешности от пуска к пуску (равна разнице постоянных поправок, определённых в двух пусках с разницей во времени не менее 6 часов) | ±0,25° sесj | - |
| 4. Погрешность компенсации скоростной погрешности на прямом курсе при постоянной скорости до 70 уз | ±0,2° sесj | - |
| 5. Погрешность вызванная качкой с горизонтальным ускорением до 1 м/с2 | ±0,6° sесj | - |
| 6. Погрешность, вызванная быстрым изменением скорости корабля на величину до 70 уз | ±2,0° | - |
| 7. Погрешность, вызванная быстрым изменением курса на величину до 180° при скорости до 70 уз и при максимальной скорости циркуляции 20°/с | ±2,5° | - |
| 8. Погрешность при любом режиме движения корабля при скорости до 70 уз и при качке с горизонтальным ускорением до 1м/с2 | ±2,7° | ±3,0° |
|
Режим ГА | ||
| 1. Скорость азимутального дрейфа (ухода) на ошвартованном корабле при качке до 1° | ± 0,2°/ч | ± 0,5°/ч |
| 1 | 2 | 3 |
| 2. Скорость азимутального дрейфа (ухода) при движении на прямом курсе при постоянной скорости корабля до 70 уз | ± 0,2°/ч | ± 0,5°/ч |
| 3. Скорость азимутального дрейфа (ухода) при любом режиме движения корабля при скорости до 70 уз | ± 0,5°/ч | ± 1,0°/ч |
3. Время готовности ГКУ-5 к навигационному использованию в широтах до 70°N(S) при нормальной температуре окружающей среды (25±10)° на неподвижном корабле, стоящем на ровном киле, составляет от 25 до 60 мин.
Время готовности ГКУ-5 к навигационному использованию в широтах от 70° до 85°N(S), при температуре окружающей среды, отличной от нормальной, в условиях бортовой и килевой качки может увеличиться до 120 мин.
В обоих случаях при готовности ГКУ-5 к навигационному использованию погрешность курса составит не более ±1°. С нормированной точностью ГКУ-5 начинает вырабатывать курс через 2,5 часа после включения.
4. Электропитание ГКУ-5 осуществляется от корабельной однофазной сети переменного тока 220 В 50 Гц от главного ГРЩ или аварийного АРЩ распределительных щитов по двум независимым линиям или корабельной аварийной сети постоянного тока напряжением 24 В. Если ГКУ-5 включён в состав навигационного комплекса НК, то он получает постоянный ток 24 В из системы электропитания НК.
5. Назначенный ресурс работы ГКУ-5 до капитального ремонта - 30000 ч.
6. Срок службы ГКУ-5 до списания - 12 лет.
Состав ГКУ-5
ГКУ-5 может поставляться в различных комплектациях. Комплектации различаются назначением, типом периферийных приборов и видом используемой корабельной электросети.
Комплектация ГКУ-5 ПИКВ.461524.003 является базовой, используется для вновь строящихся кораблей или судов. Максимальный комплект включает в себя:
- ЦП-3- центральный прибор - 1 шт;
- БЭ-3 - блок электронный - 1 шт;
- ПО-3 -пульт оператора - 1 шт;
- РК - распределительная коробка - 1 шт;
- БП-36.001 - блок питания - 1 шт;
- 38-РШ - репитер аналоговый - (количество зависит от проекта корабля);
- 38-РЦ - репитер цифровой - (количество зависит от проекта корабля);
- 19-РШ – репитер пеленгаторный - (количество зависит от проекта корабля);
- 20-РШ - пелорус палубный - (количество зависит от проекта корабля);
- 21-ГРШ - пелорус настольный - (количество зависит от проекта корабля);
- ПГК-2 - оптический пеленгатор - 2 шт;
- эксплуатационный одиночный комплект ЗИП - 1 шт;
- комплект технической документации - 1 шт.
В другие комплектации ГКУ-5 могут дополнительно входить приборы:
- 23Ц – курсограф - 1 шт;
- ТК1(2,3) - транслятор курса потребителям - 1 шт;
- РБП – расширитель бортового питания - 1 шт;
- ПК1 – переключатель каналов основного и резервного курсоуказания - 1 шт.
1.4. Устройство и основные свойства динамически
настраиваемого гироскопа
ГКУ-5 представляет собой двухрежимный, корректируемый гирокурсоуказатель с использованием в качестве чувствительного элемента динамически настраиваемого гироскопа ДНГ, обеспечивающего требуемую точность курсоуказания, устойчивость к механическим и климатическим воздействиям. Для управления и коррекции ДНГ применена электронная схема, устраняющая скоростную, широтную и другие погрешности, что позволяет эффективно использовать ГКУ-5 при любом режиме движения корабля. После включения ГКУ-5, схема управления обеспечивает автоматическое горизонтирование и приведение гироскопа в плоскость меридиана, а также последующую работу ГКУ-5 в режимах ГК и ГА.
Главным конструктивным отличием ДНГ от гироскопов других двухрежимных гирокурсоуказателей [1], является внутренний упругий вращающийся подвес (рис.1). Упругий подвес находится внутри тороидального ротора. Тороидальный ротор является носителем кинетического момента H, поэтому является гироскопом. Данный гироскоп является уравновешенным трёхстепенным управляемым и корректируемым гироскопом с внутренним упругим подвесом. Он имеет полную свободу вращения вокруг главной оси и, ограниченную углами закручивания упругих элементов, свободу вращения вокруг экваториальных осей. Через упругий подвес ротор крепится к валу электродвигателя (гиромотора).
Рис. 1. ДНГ модели ГВК-6 ГКУ-5
Собственное вращение гироскопа создаётся валом электродвигателя через упругий подвес. Электродвигатель установлен на платформе, которая, в свою очередь, находится в карданном подвесе. Карданный подвес, состоящий из внутренней и наружной рамок, обеспечивает платформе три степени свободы, т. е. повороты вокруг осей YпZпXп. Главными осями платформы и гироскопа являются оси Yп и Y, соответственно. Вертикальными осями являются оси Zп и Z, соответственно, которые направленны вверх, а правую систему осей дополняют оси Xп и X соответственно.
Углами отклонения главных осей платформы и гироскопа от плоскости меридиана являются углы αп и α соответственно, от плоскости горизонта – βп и β соответственно, а углами отклонения осей Xп и X платформы и гироскопа от плоскости горизонта – θп и θ соответственно.
Основной особенностью данной конструкции является чрезвычайно слабая связь через упругий подвес между гироскопом и остальными элементами, включая стабилизированную платформу. Поэтому, влияние вредных моментов действующих на все элементы конструкции, за исключением гироскопа, на точность выработки курса значительно снижается.
Создание полезных моментов для управления ДНГ осуществляется путём воздействия моментов сил электромагнитной индукции датчиков моментов ДМX и ДМZ, установленных внутри корпуса ДНГ, на ротор. Для этого датчики моментов стремятся развернуть гироскоп вокруг осей X и Z. При этом может изогнуться упругий подвес вокруг этих же осей. Напрашивается следствие, что изогнутый упругий подвес, обладая жёсткостью, будет создавать и прикладывать к гироскопу вредные моменты, понижающие точность выработки курса. Однако у ДНГ имеется свойство динамической настройки, которая производится на заводе-изготовителе. Вредные моменты жёсткости изогнутого подвеса могут быть скомпенсированы инерционными моментами (центробежными и кориолисовыми) самого упругого подвеса. Инерционные моменты зависят от осевого и экваториальных моментов инерции упругого подвеса и скорости собственного вращения гироскопа. Моменты жёсткости упругого подвеса определяются вдоль осей X или Z как:
 =2
=2  и
и  =2kα (1.1)
=2kα (1.1)
соответственно,
где k – коэффициент жёсткости упругого подвеса при его изгибе.
Общие инерционные моменты упругого подвеса определяются вдоль осей X или Z как:
 = Ω2(B + C - A)
= Ω2(B + C - A)  = Ω2(B + C- A)α, (1.2)
= Ω2(B + C- A)α, (1.2)
соответственно,
где A – осевой момент инерции упругого подвеса относительно главной оси Y;
B – экваториальный момент инерции упругого подвеса относительно оси X;
C - экваториальный момент инерции упругого подвеса относительно оси Z;
Ω – угловая скорость собственного вращения гироскопа.
Подбором угловой скорости собственного вращения гироскопа, моментов инерции упругого подвеса и коэффициента жёсткости упругих элементов можно добиться условия динамической настройки гироскопа, при котором Мж = Ми вдоль каждой из осей X и Z. Тогда, из соответствующих равенств, можно определить:
 . (1.3)
. (1.3)
Данное условие динамической настройки ДНГ характеризует такое свойство динамически настраиваемого гироскопа с внутренним подвесом, при котором упругий подвес, осуществляя точное линейное совмещение центра тяжести гироскопа с центром его подвеса, не прикладывают к гироскопу вредных моментов при любых его поворотах вокруг осей X и Z. Для сохранения динамической настройки в процессе эксплуатации нестабильность угловой скорости собственного вращения Ω гироскопа должна быть в пределах 0,01–0,001% от нормированного значения.
ДНГ отличается очень малыми размерами и массой (масса его тороидального ротора вместе с упругим подвесом составляет примерно 50 г), что позволяет применять маломощные датчики моментов и электродвигатель привода.

Контрольные вопросы
1. Для чего предназначен ГКУ-5?
2. Чем, с практической точки зрения, отличаются режимы ГК и ГА ГКУ-5?
3. При каких параметрах движения корабля, внешней среды и электропитания можно использовать ГКУ-5?
4. Какие основные функции обеспечивает ГКУ-5?
5. С какой точностью ГКУ-5 вырабатывает курс в режиме ГК и от чего зависит эта точность?
6. Из-за какой величины в режиме ГА у ГКУ-5 нарастает с течением времени погрешность курса, какова скорость нарастания в различных условиях?
7. Каково время готовности ГКУ-5 к использованию в зависимости от внешних условий?
8. Какими видами электропитания нужно обеспечить ГКУ-5 для его работы?
9. Какие приборы входят в состав ГКУ-5 в зависимости от его комплектации?
10. Каковы главные конструктивные отличия гироскопа ДНГ от гироскопов других гирокурсоуказателей?
11. Перечислите все характеристики ДНГ.
12. В чём заключается условие динамической настройки ДНГ?
13. От чего зависит сохранение динамической настройки ДНГ в процессе эксплуатации ГКУ-5?
РЕЖИМАХ
Режима «ГИРОКОМПАС»
Управление ДНГ преследует цель обеспечить его необходимое положение относительно географической горизонтной системы координат (ГГСК). Управление ДНГ осуществляется двумя каналами управления, горизонтальным и вертикальным. Горизонтальный канал управления создаёт управляющие и корректирующие моменты, направленные вдоль оси Z ротора, а вертикальный канал управления – моменты, направленные вдоль оси X ротора. Для выработки курса главная ось Y ротора должна совпадать с плоскостями меридиана и горизонта. После подачи питания и, при установленном режиме работы «ГК», решается задача приведения оси Y в эти плоскости. В ГКУ-5 эта задача полностью автоматизирована. Её выполнение осуществляется в несколько этапов. Вначале происходит форсированный разгон ротора до рабочих оборотов. Затем, через 68 секунд после подачи электропитания, включается режим горизонтирования, т. е. приведения в плоскость горизонта главной оси Y. Это осуществляется по команде «ГА» из прибора БЭ-3. Система стабилизации платформы (следящая система) ГКУ-5, которая согласовывает платформу с ротором ДНГ по углам αп и βп отключена до момента начала приведения ротора в плоскость меридиана (автоприведения). В работе системы стабилизации ГКУ-5, имеется важное отличие от подобной системы в ГКУ-1 [1], в которой и согласование следящего элемента с гироскопом и управление самим гироскопом, осуществляется путём подачи сигналов на одни и те же двигатели стабилизации. В ГКУ-5 эти цепи разделены. Управление гироскопом осуществляется путём подачи сигналов на датчики моментов ДМX и ДМZ, а согласование положения платформы с ротором ДНГ - путём подачи сигналов на двигатели стабилизации ДСX и ДСZ.
В ГКУ-5 датчик момента, расположенный вдоль горизонтальной оси X обозначается как ДМX, но создаёт моменты, направленные вдоль оси Z, а датчик момента расположенный вдоль вертикальной оси Z обозначается как ДМZ, но создаёт моменты, направленные вдоль оси X. Канал управления, связанный с ДМX называется горизонтальным, а связанный с ДМZ - вертикальным.
Управление ротором ДНГ осуществляется по сигналу с индикатора горизонта ИГ, расположенного на платформе (рис. 2) и делится на несколько этапов. Во время первого этапа - горизонтирования, по команде «ГА» из прибора БЭ-3, сигнал с индикатора горизонта Uβ = kигβс, где kиг – коэффициент, зависящий от свойств индикатора горизонта, пропорциональный углу βс, пройдя усиление и преобразование в приборе БЭ-3, поступает только в горизонтальный канал управления на датчик момента ДМX, который создаёт момент горизонтирования вдоль оси Z:
 (2.1)
(2.1)
где  – общий коэффициент горизонтального канала, который зависит от свойств индикатора горизонта, цифро-аналогового преобразователя, усилителей и датчика момента горизонтального канала.
– общий коэффициент горизонтального канала, который зависит от свойств индикатора горизонта, цифро-аналогового преобразователя, усилителей и датчика момента горизонтального канала.
В режиме горизонтирования коэффициент увеличивается для создания большего, по сравнению с основными режимами, момента вдоль оси Z. Кроме того, на датчик момента ДМX поступает сигнал коррекции:
 (2.2)
(2.2)
где  - коэффициент цепи управления горизонтального канала, который зависит от свойств цифро-аналогового преобразователя, усилителей и датчика момента горизонтального канала.
- коэффициент цепи управления горизонтального канала, который зависит от свойств цифро-аналогового преобразователя, усилителей и датчика момента горизонтального канала.
Этот сигнал формируется в приборе БЭ-3. Момент коррекции горизонтального канала управления равен:
 . (2.3)
. (2.3)
Составляющими данного момента коррекции являются:
−  - момент коррекции скоростной погрешности ГКУ-5 в режиме ГК [2];
- момент коррекции скоростной погрешности ГКУ-5 в режиме ГК [2];
- - момент компенсации горизонтного дрейфа гироскопа от плоскости горизонта;
− - момент компенсации температурного горизонтного дрейфа гироскопа от плоскости горизонта;
Общий момент, создаваемый вдоль оси Z равен:
 . (2.4)
. (2.4)
В вертикальном канале управления датчик момента ДМZ отключён до момента начала второго этапа - автоприведения ротора ДНГ в плоскость меридиана и не создаёт никаких моментов.
После окончания горизонтирования (через 267 с после включения ГКУ-5) снимается команда «ГА» и выдаётся команда «АП» («Автоприведение»), т. е. начинается автоприведение гироскопа в плоскость меридиана. По этой команде ДНГ управляется, как гироскоп короткопериодного (для ускорения процесса автоприведения) гирокомпаса, а сигнал с индикатора горизонта подаётся в оба канала управления (в вертикальном канале управления включается датчик момента ДМZ). Только для вертикального канала управления этот сигнал делится в приборе БЭ-3 на cos  и, в виде , поступает на датчик момента ДМZ, который создаёт приводящий (аналог управляющего в ГКУ-1) [1] момент вдоль оси X:
и, в виде , поступает на датчик момента ДМZ, который создаёт приводящий (аналог управляющего в ГКУ-1) [1] момент вдоль оси X:
 (2.5)
(2.5)
где  – общий коэффициент вертикального канала, который зависит от свойств индикатора горизонта, цифро-аналогового преобразователя, усилителей и датчика момента горизонтального канала, он увеличивается при автоприведении по сравнению с основными режимами.
– общий коэффициент вертикального канала, который зависит от свойств индикатора горизонта, цифро-аналогового преобразователя, усилителей и датчика момента горизонтального канала, он увеличивается при автоприведении по сравнению с основными режимами.
Угол  делится на cos для регулировки приводящего момента в зависимости от широты. Это даёт возможность увеличивать приводящий момент с увеличением широты и поддерживать постоянным, независимо от широты, период незатухающих колебаний ДНГ (подробно в разд. 2.2), а также преобразовывает закон изменения широтной погрешности.
делится на cos для регулировки приводящего момента в зависимости от широты. Это даёт возможность увеличивать приводящий момент с увеличением широты и поддерживать постоянным, независимо от широты, период незатухающих колебаний ДНГ (подробно в разд. 2.2), а также преобразовывает закон изменения широтной погрешности.
Кроме того, датчик момента ДМZ создаёт момент коррекции  :
:
 . (2.6)
. (2.6)
Этот момент создаётся по сигналу коррекции:
 , (2.7)
, (2.7)
который формируется в приборе БЭ-3. Составляющая момента коррекции  служит для коррекции широтной погрешности ГКУ-5 в режиме ГК [2]. Другие составляющие H
служит для коррекции широтной погрешности ГКУ-5 в режиме ГК [2]. Другие составляющие H  и
и  служат для компенсации азимутального и температурного азимутального дрейфа гироскопа от плоскости меридиана, соответственно.
служат для компенсации азимутального и температурного азимутального дрейфа гироскопа от плоскости меридиана, соответственно.
Общий момент, создаваемый вдоль оси X равен:
 +
+  =
=  . (2.8)
. (2.8)
В горизонтальном канале управления по команде «АП» изменяется коэффициент управления  , и, вместо момента горизонтирования
, и, вместо момента горизонтирования  , формируется демпфирующий момент вдоль оси Z:
, формируется демпфирующий момент вдоль оси Z:
 . (2.9)
. (2.9)
Рассмотрим, какое движение будет совершать главная ось Y ДНГ относительно плоскостей меридиана и горизонта по углам α и β на корабле, движущемся постоянными курсом и скоростью под действием только приводящего и демпфирующего моментов. Для этого воспользуемся уравнениями абсолютного прецессионного движения гироскопов, [2]. В выражения для углов α и β подставим значения приводящего и демпфирующего моментов, получим:
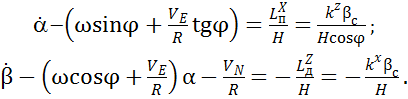 (2.10)
(2.10)
Не выясняя характер и траекторию этого движения, определим, вначале, координаты положения равновесия ДНГ. Углы α и β, относящиеся к ротору ДНГ, можно считать равными углам, относящимся к платформе αп и  . В положении равновесия углы α и β являются равновесными углами αr и βr, которые не меняются, то есть . При этом из (2.10) получим:
. В положении равновесия углы α и β являются равновесными углами αr и βr, которые не меняются, то есть . При этом из (2.10) получим:
 (2.11)
(2.11)
 (2.12)
(2.12)
Из формул (2.11) и (2.12) видно, что в положении равновесия, под действием только моментов управления, ДНГ не находится ни в плоскости меридиана, ни в плоскости горизонта. Наиболее важным является угол αr, так как он определяет отклонение ДНГ от плоскости меридиана и, следовательно, является погрешностью курса ГКУ-5, в данном случае. Из формулы (2.12) видно, что эта погрешность имеет две составляющие. Первая называется широтной погрешностью и определяется как:
 . (2.13)
. (2.13)
Из (2.13) видно, что по сравнению с широтной погрешностью ГКУ-1 [2], у ГКУ-5 она имеет не тангенциальный, а синусоидальный закон изменения.
Вторая составляющая называется скоростной погрешностью и определяется как:
 . (2.14)
. (2.14)
В ГКУ-5, для компенсации широтной и скоростной погрешностей, применяется способ коррекции положения гироскопа относительно плоскости меридиана. Для этих целей, в числе других, и создаются моменты коррекции и  в режиме ГК. С их учётом, дифференциальные уравнения движения ДНГ относительно плоскостей меридиана и горизонта по углам α и β на корабле, движущемся постоянными курсом и скоростью (2.10), будут иметь вид:
в режиме ГК. С их учётом, дифференциальные уравнения движения ДНГ относительно плоскостей меридиана и горизонта по углам α и β на корабле, движущемся постоянными курсом и скоростью (2.10), будут иметь вид:

 ; (2.15)
; (2.15)

(2.16)
Из уравнения (2.15) можно определить, что в положении равновесия, когда


и при = 0,
равновесный угол 
Из уравнения (2.16) можно определить, при тех же условиях, что  , т. е.
, т. е.  и
и  . Таким образом, моменты широтной
. Таким образом, моменты широтной  и скоростной коррекции в режиме ГК устраняют широтную и скоростную погрешности ГКУ-5.
и скоростной коррекции в режиме ГК устраняют широтную и скоростную погрешности ГКУ-5.
Решения дифференциальных уравнений (2.15) и (2.16), т.е. законы изменения углов  и
и  будут иметь вид [2]:
будут иметь вид [2]:
 (2.17)
(2.17)
| где | 
| - начальное отклонение от меридиана; |

| - начальное отклонение от горизонта; | |
| А1 | - начальная амплитуда колебаний по углу a; | |
| А2 | - начальная амплитуда колебаний по углу β; | |

| - -круговая частота затухающих колебаний по углам a и β; | |

| – начальная фаза колебаний по углу a; | |

| – начальная фаза колебаний по углу β; | |
| h | - коэффициент затухания колебаний по углам a и β; | |
| t | - текущее время с момента начала работы ГКУ-5. |
Из (2.17) следует, что если в начальный момент ДНГ был отклонен от плоскости меридиана на угол  , а от плоскости горизонта на угол , то он начнет движение к этим плоскостям, которое будет являться периодическим (колебательным) и затухающим, траекторией которого относительно ГГСК является сходящаяся логарифмическая спираль. Для того чтобы колебания были затухающими, коэффициент затухания h должен быть отрицательным. При этом должен выполняться критерий Гурвица [6], который для ГКУ-5 сводится к следующему соотношению
, а от плоскости горизонта на угол , то он начнет движение к этим плоскостям, которое будет являться периодическим (колебательным) и затухающим, траекторией которого относительно ГГСК является сходящаяся логарифмическая спираль. Для того чтобы колебания были затухающими, коэффициент затухания h должен быть отрицательным. При этом должен выполняться критерий Гурвица [6], который для ГКУ-5 сводится к следующему соотношению
 (2.18)
(2.18)
где  – коэффициент демпфирования колебаний маятника в индикаторе горизонта;
– коэффициент демпфирования колебаний маятника в индикаторе горизонта;
c – коэффициент упругости подвеса маятника индикатора горизонта.
Критерий Гурвица определяет соотношение способностей к затуханию колебаний у маятника индикатора горизонта (левая часть) и гироскопа ДНГ (правая часть) и показывает, что способность к затуханию колебаний у гироскопа должна быть больше. Основным источником колебаний ротора ДНГ является маятник ИГ. Его колебания через систему управления гироскопом передаются ротору ДНГ, а через систему стабилизации – платформе, а значит – гироблоку в целом. За счёт подбора коэффициентов цепей управления гироскопом  и можно изменять параметры колебаний ротора ДНГ.
и можно изменять параметры колебаний ротора ДНГ.
Оба колебательных движения ротора ДНГ по углам α и β происходят с одинаковым периодом затухающих колебаний Td [2]:
 (2.19)
(2.19)
Если представить приводящий момент в виде  , то период собственных (незатухающих) колебаний ДНГ T0 при отключённом демпфировании,
, то период собственных (незатухающих) колебаний ДНГ T0 при отключённом демпфировании,
без учёта малой величины  , равен:
, равен:
T0 =  2
2  = 2
= 2  (2.20)
(2.20)
где  – частота собственных колебаний ДНГ.
– частота собственных колебаний ДНГ.
Из (2.20) видно, что период собственных (незатухающих) колебаний ДНГ и гироблока за счёт деления сигнала ИГ на  , не зависит от широты корабля.
, не зависит от широты корабля.
Во время автоприведения по команде «АП» увеличивается (по сравнению с основными режимами) коэффициент управления вертикального канала  , что приводит к уменьшению периодов незатухающих и затухающих колебаний ДНГ. ГКУ-5 становится короткопериодным гирокомпасом, что сокращает время приведения его в меридиан. Однако, при этом, период незатухающих колебаний ДНГ не соответствует периоду Шулера, что будет источником инерционных погрешностей при маневрировании и качке корабля, [2]. Поэтому запуск ГКУ-5 желательно производить на ошвартованном в базе корабле. Приведение ГКУ-5 в плоскость меридиана полностью автоматизировано. Через 18 мин 24 с после включения ГКУ-5, в приборе БЭ-3 начинается сравнение сигнала b/cosj с величиной «Uпорог.1» = 250 мВ и, если, величина сигнала b/cosj не превышает значения «Uпорог.1», то в приборе БЭ-3 начинается отсчёт времени в течение 8 минут. Если за это время указанный сигнал не превысит значение «Uпорог.1», что свидетельствует об окончании приведения ДНГ в плоскость меридиана (отклонение платформы от плоскости меридиана не превышает 1°), то снимается команда «АП», выдаётся команда «ГК» и формируется сигнал готовности в приборе ПО-3.
, что приводит к уменьшению периодов незатухающих и затухающих колебаний ДНГ. ГКУ-5 становится короткопериодным гирокомпасом, что сокращает время приведения его в меридиан. Однако, при этом, период незатухающих колебаний ДНГ не соответствует периоду Шулера, что будет источником инерционных погрешностей при маневрировании и качке корабля, [2]. Поэтому запуск ГКУ-5 желательно производить на ошвартованном в базе корабле. Приведение ГКУ-5 в плоскость меридиана полностью автоматизировано. Через 18 мин 24 с после включения ГКУ-5, в приборе БЭ-3 начинается сравнение сигнала b/cosj с величиной «Uпорог.1» = 250 мВ и, если, величина сигнала b/cosj не превышает значения «Uпорог.1», то в приборе БЭ-3 начинается отсчёт времени в течение 8 минут. Если за это время указанный сигнал не превысит значение «Uпорог.1», что свидетельствует об окончании приведения ДНГ в плоскость меридиана (отклонение платформы от плоскости меридиана не превышает 1°), то снимается команда «АП», выдаётся команда «ГК» и формируется сигнал готовности в приборе ПО-3.
2.2. Работа ГКУ-5 в режиме «ГИРОКОМПАС»
После приведения в меридиан ГКУ-5 автоматически переключается в основной режим ходового гирокомпаса с периодом незатухающих колебаний равным периоду Шулера, за счёт уменьшения коэффициента управления вертикального канала . Через 2,5 часа после включения ГКУ-5 точность работы достигнет нормированных величин. Этот режим используется при плавании корабля в широтах до 85°N(S). В этом режиме коэффициент управления вертикального канала принимает основное рабочее значение, меньшее, по сравнению с режимом автоприведения. В остальном управление ДНГ в основном режиме «ГК» ничем не отличается от управления им в подготовительном режиме по команде «АП». Управление гироскопом осуществляется посредством приводящего и демпфирующего моментов, а коррекция положения – посредством моментов широтной и скоростной коррекции. Также производится компенсация азимутального, горизонтного и температурных дрейфов. Во время маневрирования ГКУ-5 продолжает работать в режиме ГК, поэтому период незатухающих колебаний ДНГ должен быть равен периоду Шулера. Из (2.20) следует, что у ГКУ-5 период незатухающих колебаний не зависит от широты. Если ГКУ-5 настроить на период Шулера в расчётной широте, то он будет сохранять эту настройку в любой другой широте. Эта настройка может быть произведена путём подбора соответствующего коэффициента цепи управления. Приравнивая (2.20) к значению периода Шулера [2], можно получить необходимое значение коэффициента цепи управления
2  ,
,
отсюда:
 . (2.21)
. (2.21)
По формуле (2.21) рассчитывается коэффициент цепи управления вертикального канала для расчётной широты.
Исходя из недокументированных сведений можно предположить, что при превышении сигнала b/cosj величины «Uпорог.2» =
= 1,0 В (вероятно, что отклонение главной оси гироблока от меридиана при этом составляет 4°) выдаётся команда «АП» и ГКУ-5 начинает приходить в меридиан в режиме короткопериодного ГК. В дальнейшем ГКУ-5 будет работать по алгоритму, описанному в 2.1.
Широтная погрешность ГКУ-5
Широтная погрешность возникает из-за того, что для управления гироскопом предусмотрено конструктивное создание моментов по оси Z поплавка. Широтная погрешность определяется формулой (2.13):
 .
.
Из формулы видно, что δКφ зависит от параметров и и широты корабля. У ГКУ-5 эта погрешность из-за деления сигнала ИГ на имеет синусоидальный закон изменения, т. е на экваторе она равна 0°, а на полюсе – величине  .
.
Для предупреждения широтной погрешности в ГКУ-5 предусмотрена широтная коррекция положения гироскопа относительно плоскости меридиана. Для этого, согласно формуле (2.7) в БЭ-3 рассчитывается сигнал широтной коррекции:
 ).
).
По данному сигналу датчик момента ДМZ согласно формуле (2.6) создаёт корректирующий момент
 ),
),
при котором положение поплавка оказывается скорректированным на угол противоположный по направлению и равный по величине широтной погрешности. Однако, из-за погрешностей в широте и скорости, которые поступают в БЭ-3, часть широтной погрешности остается не скомпенсированной и образуется остаточная широтная погрешность (2.6.4).
2.6.3. С коростная погрешность ГКУ-5
Скоростная погрешность аналогична соответствующей погрешности гирокомпасов. Скоростная погрешность ГКУ-5 определяется формулой (2.14):
 .
.
У ГКУ-5, для предупреждения скоростной погрешности, осуществляется скоростная коррекция положения гироскопа относительно плоскости меридиана. Для этого, согласно формуле (2.2), в БЭ-3 рассчитывается сигнал скоростной коррекции:
 .
.
По данному сигналу датчик момента ДМX , согласно формуле (2.3), создаёт корректирующий момент:
 ,
,
при котором положение гироскопа оказывается скорректированным на угол, противоположный по направлению и равный по величине скоростной погрешности. Однако, из-за погрешностей в скорости, которая поступает в БЭ-3, часть скоростной погрешности оказывается не скомпенсированной и образуется остаточная скоростная погрешность (2.6.4).
2.6.4. П огрешности ГКУ-5 из-за неточного ввода внешней информации
Погрешности ввода широты и скорости в БЭ-3 вызывают остаточные широтную и скоростную погрешности ГКУ-5 в режиме ГК. Суммарная остаточная погрешность из-за неправильного ввода широты и скорости в режиме ГК составляет [8]
δКгк= (0,05×δ  +0,06×δV×cosКгк×sec ), (2.23)
+0,06×δV×cosКгк×sec ), (2.23)
где Кгк – курс в режиме ГК, град.;
δКгк – погрешность курса в режиме ГК, град.;
 - широта корабля, град.;
- широта корабля, град.;
δ – погрешность широты, град.;
δV – погрешность скорости, уз.
Погрешности ввода широты и скорости вызывают погрешности азимутальной и горизонтной коррекции ГКУ-5 в режиме ГА. Суммарный остаточный азимутальный дрейф из-за неправильного ввода широты и скорости в режиме ГА составляет [8]
 =(0,25∙δ ∙cos +0,017∙δV∙sinКГА∙tg ), (2.24)
=(0,25∙δ ∙cos +0,017∙δV∙sinКГА∙tg ), (2.24)
где КГА - курс в режиме ГА, град.
2.6.5. Инерционные погрешности ГКУ-5
Инерционные погрешности возникают из-за воздействия на элементы ГКУ-5 сил инерции во время маневров и качки корабля.
Гироскоп ДНГ является уравновешенным гироскопом, то есть его центр тяжести совмещен с центром подвеса. Инерционные силы, действующие на гироскоп во время маневров и качки корабля, плеча не имеют и моментов не создают. Можно считать, что маневрирование и качка корабля непосредственно на ДНГ не влияет.
Вместе с тем, в составе ГКУ-5 имеются элементы, которые являются маятниковыми устройствами. Ими являются индикатор горизонта и платформа. У этих элементов центр тяжести смещен вниз относительно точки подвеса, поэтому у сил инерции имеется плечо, они создают моменты и вызывают отклонения маятника индикатора горизонта и платформы от нулевого положения во время маневров и качки корабля. Из-за этого во время манёвров корабля возникают инерционные погрешности ДГКУ, которые делятся на три рода:
1. Инерционной погрешностью ГКУ-5 первого рода δ1 называется погрешность, вызванная неравенством фактического периода незатухающих колебаний ДНГ периоду Шулера.
Чувствительный элемент ГКУ-5 представляет собой совокупность ДНГ и ИГ. ИГ представляет собой маятниковое устройство с относительно небольшим периодом собственных колебаний. Однако, как показано в разделе 2.2, путём установки необходимого коэффициента  можно создать у ДНГ период незатухающих колебаний равный периоду Шулера. Из-за деления сигнала ИГ в вертикальном канале управления на cos период незатухающих колебаний ДНГ не будет зависеть от широты. При этом вредный сигнал, поступающий в вертикальный канал управления из-за отклонения маятника ИГ под действием сил инерции во время манёвра корабля, не будет вызывать погрешность в положении ДНГ относительно компасного меридиана. Коэффициент согласно формуле (2.21) зависит от величины кинетического момента ДНГ – H. Кинетический момент H должен быть постоянным, но из-за колебаний температуры внутри ДНГ и параметров электропитания, подаваемого на гиромотор, фактически, он может изменяться. Из-за непостоянства этой величины период незатухающих колебаний ДНГ может измениться и у ГКУ-5 появится остаточная инерционная погрешность 1 рода.
можно создать у ДНГ период незатухающих колебаний равный периоду Шулера. Из-за деления сигнала ИГ в вертикальном канале управления на cos период незатухающих колебаний ДНГ не будет зависеть от широты. При этом вредный сигнал, поступающий в вертикальный канал управления из-за отклонения маятника ИГ под действием сил инерции во время манёвра корабля, не будет вызывать погрешность в положении ДНГ относительно компасного меридиана. Коэффициент согласно формуле (2.21) зависит от величины кинетического момента ДНГ – H. Кинетический момент H должен быть постоянным, но из-за колебаний температуры внутри ДНГ и параметров электропитания, подаваемого на гиромотор, фактически, он может изменяться. Из-за непостоянства этой величины период незатухающих колебаний ДНГ может измениться и у ГКУ-5 появится остаточная инерционная погрешность 1 рода.
Инерционная погрешность 1 рода имеет следующие свойства:
- погрешность δ1 достигает максимума практически в момент окончания маневра корабля и имеет прямую зависимость от времени манёвра и величины ускорения;
- величина погрешности δ1 прямо пропорциональна коэффициенту и обратно пропорциональна кинетическому моменту гироскопа Н;
- δ1 вызывают только ускорения корабля северного и южного направления;
2. Инерционной погрешностью ГКУ-5 второго рода δ2 называется погрешность, вызванная вредным сигналом, создаваемым горизонтальным каналом управления из-за воздействия сил инерции во время маневра корабля на маятник индикатор горизонта.
При отклонении маятника ИГ во время манёвра корабля под действием сил инерции вредный сигнал горизонтального канала управления изменяет необходимый демпфирующий момент  , что вызывает погрешность в положении ДНГ относительно меридиана δ2.
, что вызывает погрешность в положении ДНГ относительно меридиана δ2.
Инерционная погрешность 2 рода имеет следующие свойства:
- погрешность δ2 достигает максимума через четверть периода затухающих колебаний ГКУ-5 после окончания маневра корабля и имеет квадратичную зависимость от времени манёвра и прямую – от величины ускорения;
- погрешность δ2 имеет направление, противоположное погрешности δ1;
- погрешность δ2 прямо пропорциональна коэффициенту и обратно пропорциональна квадрату кинетического момента поплавка Н;
- δ2 вызывают только ускорения корабля северного и южного направления;
3. Инерционной погрешностью ГКУ-5 третьего рода δ3, называется погрешность, вызванная вредным сигналом, создаваемым вертикальным каналом управления из-за воздействия сил инерции во время маневра корабля на платформу.
Благодаря тому, что к нижней части платформы прикреплены грузы, у неё понижен центр тяжести, и она представляет собой короткопериодный маятник. При отсутствии ускорений, под действием силы тяжести, платформа занимает положение, при котором ось платформы Xп находится в горизонте, то есть угол θп = 0. Так как, ось платформыYп практически совпадает с меридианом, то ось Xп направлена вдоль линии первого вертикала Е - W. При наличии у корабля ускорения jE, направленного вдоль этой линии, ось Xп отклонится от плоскости горизонта на угол θп  . При этом, через корпус ДНГ, гиромотор, вал и упругий подвес, платформа развернет ротор ДНГ вокруг оси Y на равный угол θ = θп, так как ДНГ не обладает устойчивостью, препятствующей таким поворотам. Из-за поворота ротора ДНГ изменится приводящий момент, что вызовет погрешность в положении ДНГ относительно меридиана δ3.
. При этом, через корпус ДНГ, гиромотор, вал и упругий подвес, платформа развернет ротор ДНГ вокруг оси Y на равный угол θ = θп, так как ДНГ не обладает устойчивостью, препятствующей таким поворотам. Из-за поворота ротора ДНГ изменится приводящий момент, что вызовет погрешность в положении ДНГ относительно меридиана δ3.
Данную погрешность можно охарактеризовать следующим образом:
- погрешность δ3 достигает максимума, как и δ2, примерно через четверть периода затухающих колебаний ГКУ-5 после окончания маневра корабля и имеет квадратичную зависимость от времени манёвра и, прямую - от величины ускорения;
- погрешность δ3 прямо пропорциональна коэффициенту  ГКУ-5 и обратно пропорциональна кинетическому моменту гироскопа;
ГКУ-5 и обратно пропорциональна кинетическому моменту гироскопа;
- погрешность δ3 имеет направление, как и δ2, противоположное погрешности δ1;
- δ3 вызывают только ускорения корабля восточного и западного направлений.
4. Четвертной или интеркардинальной называется погрешность во время качки корабля. Она возникает во время длительной регулярной качки корабля, когда одновременно начинают раскачиваться маятник индикатора горизонта вокруг оси Xп и платформа вокруг оси Yп. Эта погрешность зависит от параметров индикатора горизонта и платформы ГКУ-5. Также она зависит от курса, амплитуды и периода качки корабля. На курсах корабля равных четвертным румбам она максимальна и равна нулю на курсах, равных главным румбам.
Для предупреждения инерционных погрешностей ГКУ-5 применены следующие способы:
- индикатор горизонта заполнен вязкой жидкостью, что увеличивает коэффициент затухания и период собственных колебаний маятника. Это уменьшает углы отклонения маятника от нулевого положения из-за воздействия на него сил инерции. Данный способ предупреждает возникновение всех инерционных погрешностей;
- путём установки необходимого коэффициента у ДНГ создан период незатухающих колебаний равный периоду Шулера. Данный способ предупреждает возникновение инерционной погрешности 1 рода;
- в подвесе гироблока имеется демпфер, который уменьшает постоянное отклонение и раскачивание гироблока относительно плоскости горизонта по углу Θп из-за воздействия сил инерции. Данный способ предупреждает возникновение инерционной 3 рода, и четвертной погрешностей;
- ГКУ-5 устанавливается на кораблях на удалении от центра качки не превышающих ±15 м по продольной и ±2 м по поперечной и вертикальной осям корабля. Данный способ предупреждает возникновение четвертной погрешности.
Контрольные вопросы
1. Какие каналы управления ДНГ имеются в ГКУ-5, из каких элементов они состоят, в чём состоит цель управления ДНГ?
2. Какие команды автоматически выдаются в схему ГКУ-5 после включения до переключения в основной режим ГК?
3. Какие полезные моменты управляют ДНГ после подачи команды «ГА», как они создаются в каналах управления?
4. Какие полезные моменты управляют ДНГ после подачи команды «ГК», как они создаются в каналах управления?
5. Какие полезные моменты управляют ДНГ после подачи команды «Автоприведение», как они создаются в каналах управления?
6. Как движется ДНГ относительно ГГСК после подачи команды «Автоприведение»?
7. Какое положение равновесия занимает ДНГ относительно ГГСК в результате выполнения команды «Автоприведение»?
8. Почему период незатухающих колебаний ДНГ не зависит от широты корабля?
9. Как контролируется выполнение команды «Автоприведение»?
10. В каком случае выдается команда «ГК» для переключения в режим ГК?
11. Как производится настройка ГКУ-5 на период Шулера в режиме ГК?
12. Какую функцию выполняют моменты коррекции положения ДНГ в режиме ГК?
13. Какую функцию выполняют моменты коррекции положения ДНГ в режиме ГА?
14. В какой канал управления перестаёт поступать сигнал ИГ в режиме ГА и к чему это приводит?
15. Какие элементы входят в состав системы стабилизации ГКУ-5, в чём новизна части этих элементов?
16. Каковы функции системы стабилизации ГКУ-5?
17. Как работают линии электропитания ГКУ-5 по функциональной схеме?
18. Как работают линии ввода внешней информации по функциональной схеме?
19. Как работают линии подачи команд по функциональной схеме?
20. Как работают линии управления ДНГ по функциональной схеме?
21. Как работает система стабилизации по функциональной схеме?
22. Как работает линия выработки курса и передачи его потребителям по функциональной схеме?
23. Каковы причины возникновения карданной погрешности ГКУ-5?
24. Каковы причины возникновения широтной погрешности ГКУ-5, как она компенсируется?
25. Каковы причины возникновения скоростной погрешности ГКУ-5, как она компенсируется?
26. К чему приводит неточный ввод внешней информации в ГКУ-5?
27. Перечислите инерционные погрешности ГКУ-5 и причины их возникновения.
Устройство прибора ЦП-3
Центральный прибор крепится тремя винтами к металлической плите (рис. 4,5,6).
Внизу прибора имеется ручка регулировки яркости подсветки шкалы курса. Сама шкала курса находится сверху прибора под стеклом съёмного кожуха. На стекле нанесён индекс, совмещённый с ДП корабля.

Рис. 4. Внешний вид ЦП-3 сбоку спереди
С другой стороны прибора имеются два штепсельных электроразъёма.
Съёмный кожух поднимается вверх после отворота четырёх вертикальных винтов. Под кожухом находится платформа в кардановом подвесе (рис.7).
Карданов подвес состоит из двух рамок – наружной вертикальной и внутренней горизонтальной. На платформе (рис. 7,8,9) установлены: гироскоп ДНГ, индикатор горизонта (акселерометр), термодатчик и уровень. К платформе снизу прикреплены два маятниковых груза, обеспечивающие горизонтальное положение платформы при поворотах корпуса прибора вокруг оси Yп, плата предварительного усиления сигналов датчиков угла, а сбоку - жидкостный демпфер для гашения колебаний платформы вокруг оси Yп платформы.
На внутренней рамке установлен ротор, а на внешней – статор двигателя стабилизации ДСX. На наружной рамке установлены роторы двигателя стабилизации ДСZ и датчика курса СКТ-260, а также шкала курса. На корпусе прибора установлены статоры двигателя стабилизации ДСZ и датчика курса СКТ-260.
Рис. 5. Внешний вид ЦП-3 сверху
Рис. 6. Внешний вид ЦП-3 сбоку сзади
Рис. 7. Внутренний вид ЦП-3 сбоку
Рис. 8. Внутренний вид ЦП-3 сверху
Рис. 9. Внутренний вид ЦП-3 снизу
Устройство прибора БЭ-3
Блок электронный имеет настенный прямоугольный литой корпус. Крепится четырьмя винтами. Снизу имеет девять штепсельных электроразъёмов (рис.10).

Рис.10. Внешний вид БЭ-3 снизу
Спереди корпус имеет крышку, запирающуюся замком. Внутри корпуса расположены блок питания БП и электронные платы (рис. 11):
Рис.11. Внутренний вид БЭ-3
- плата питания гиромотора ПГМ;
- плата таймера ПТ;
- плата управления ПУ;
- плата формирования скорости ПФС;
- две платы усилителей следящих систем по азимутальному и горизонтальному каналам УСС;
- плата курса и скорости циркуляции корабля ПКС;
- плата спутниковых навигационных систем СНС;
и кронштейн с регулировочными резисторами и контрольными гнёздами «ωА», «ωГ», «ωАt», «ωГt», «О.Т.» (общая точка), возможно, контрольным гнездом «ωt», в зависимости от модификации (как на фото), и предохранителем выходного тока = 24 В на 10 А.
На передней планке БП имеются:
- предохранитель входного тока = 24 В на 5 А;
- индикатор исправности предохранителя на 5 А (горит при отсутствии или перегорании предохранителя);
- планка «Контроль» с контрольными гнёздами для замера напряжений;
- таблица соответствия гнёзд планки измеряемым напряжениям.
На передней планке платы ПГМ в зависимости от модификации ГКУ-5 могут быть (на фото отсутствуют) контрольные гнёзда:
- «1» - выход первой фазы питания гиромотора;
- «2» - выход второй фазы питания гиромотора;
- «3» - О.Т. (общая точка питания гиромотора).
На передней планке платы ПУ имеются контрольные гнёзда:
- «1» - U  ;
;
- «2» - U ;
- «3» - Usin ;
- «4» - UvcosK;
- «5» - UsinKtg ;
- «6» - (+10В) - опорное напряжение;
- «7» - (-10)В - опорное напряжение;
- «8» - О.Т.
На передней планке каждой платы УСС имеются контрольные гнёзда:
- «1» - усиленный сигнал с ДУX (ДУZ) ДНГ;
- «2» - усиленный, демодулированный и отфильтрованный сигнал с ДУX (ДУZ) ДНГ;
- «3» - О.Т.;
- «4» - выходной сигнал следящей системы (импульсный широтно-модулированный сигнал);
- «5» -  частотой 12,8 кГц;
частотой 12,8 кГц;
- возможные контрольные гнёзда «6», «7», «8» (как на фото), также светодиод «Неисправность», который сигнализирует об отказе соответствующей следящей системы ГКУ
На передней планке платы СНС могут быть 8 контрольных гнёзд в зависимости от модификации (как на фото) и светодиод «Неисправность» (может быть на самой плате, сбоку). Постоянное свечение светодиода свидетельствует об отсутствии приёма информации от СНС (из НК), а его мигание – о приёме информации от СНС (из НК).
Устройство прибора ПО-3
Пульт оператора (рис. 12) является настольным прибором и имеет кронштейн для регулировки наклона двумя ручками. Для крепления прибора в кронштейне имеются четыре отверстия для болтов.
На лицевой панели прибора сосредоточены органы управления ГКУ-5. Кнопками «ПУСК» и «СТОП» производится включение и выключение ГКУ-5. Тумблером «ГК-ГА» осуществляется выбор режима работы ГКУ-5.

Рис. 12. Внешний вид ПО-3
Ручками «Широта» грубого и точного отсчётов вручную выставляется широта корабля. В положении «СНС» (может отсутствовать, в зависимости от модификации) ручки грубого отсчёта, широта поступает от приёмника СНС (из НК). Знак широты вводится тумблером «СЕВЕР-ЮГ». Ручками «СКОРОСТЬ» грубого и точного отсчётов вручную выставляется скорость корабля. В положении «СНС» ручки грубого отсчёта, скорость (в некоторых модификациях и широта) поступает от приёмника СНС (из НК), а в положении «Лаг» - от лага.
При установке ручек в указанные положения горит индикатор «ЛАГ/СНС». Индикатор «ГОТОВНОСТЬ» зелёного свечения свидетельствует о готовности ГКУ-5 к навигационному использованию. Индикатор «ОТКАЗ» красного свечения свидетельствует о неисправности ГКУ-5. При неисправности, также, подаётся звуковой сигнал через отверстия звукового устройства. На индикаторе «КУРС» высвечивается выработанный в ГКУ-5 курс корабля. Для регулировки яркости его свечения имеется рукоятка.
Устройство прибора РК
РК предназначена для передачи курса цифровым и аналоговым потребителям. Имеет прямоугольный литой корпус настенного исполнения с крышкой. Для закрывания крышки имеется замок. Внутри корпуса размещены распределительная плата и плата с тумблерами и предохранителями (рис. 13).
Рис. 13. Внутренний вид РК
Устройство прибора 38-РШ
Прибор 38-РШ является аналоговым репитером курса (рис.14). Имеет прямоугольный литой корпус. Внутри на кронштейне находится шаговый двигатель, который зубчатой передачей связан со шкалами грубого и точного отсчётов. Для согласования репитера с прибором ЦП-3 имеется пульт, который соединяется с репитером кабелем. На пульте имеется кнопка «Согласование» и ручка для регулировки яркости подсветки шкалы репитера. На репитере имеются кнопки для регулировки яркости шкалы курса и цифровой вход.
Рис. 14. Внешний вид 38-РШ
Устройство прибора 38-РЦ
Прибор является цифровым репитером курса (рис. 15). Имеет литой корпус

Рис. 15. Внешний вид 38-РЦ
На корпусе имеется цифровой вход. На передней панели электронный индикатор «Курс» и ручка для регулировки яркости подсветки индикации курса. Внутри корпуса расположены три электронные платы:
- плата индикации П1;
- плата ввода П2;
Устройство прибора 19-РШ
| Прибор 19-РШ является пеленгаторным репитером, на который устанавливается пеленгатор ПГК-2М (рис. 16). На корпусе имеется цифровой вход. Внутри на кронштейне находится шаговый двигатель, который зубчатой передачей связан со шкалами грубого и точного отсчётов. На шкале грубого отсчёта имеется также шкала с мелкими цифрами для снятия отсчёта через призму пеленгатора. | Рис. 16. Внешний вид 19-РШ 
|
На внешнем кольцеобразном ободе репитера нанесена шкала курсового угла. Для управления двигателем внутри прибора установлены плата управления и блок питания. Согласование репитера с прибором ЦП-3 служит пульт, аналогичный пульту репитера 38-РШ.
Рис. 19. Внутренний вид БП-36.001
Рис. 20. Внутренний вид ТК-1
Устройство прибора 23Ц
Предназначен (рис. 21)для отображения курса на индикаторе и записи его на бумаге.
| Состоит из двух устройств – пульта сопряжения курсографа ПСК и записывающего устройства курсографа ЗУК – соединённых кабелем. Курс в курсограф поступает в цифровом коде. | |
| Рис. 21. Внешний вид 23Ц |
На ПСК имеется индикатор, на который можно вывести курс, время или дату. Переключение информации осуществляется кнопкой «Режим». Кнопка «Выбор» служит для выбора корректируемого параметра. Кнопка «Набор» служит для изменения выбранного параметра. Также имеются две кнопки для изменения яркости свечения индикаторов. Кнопка «60/600» служит для изменения скорости протяжки бумаги. Саму скорость показывает точечный индикатор с надписями «60 мм/ч» или «600 мм/ч». Для приведения ПСК в исходное состояние после сбоев в работе имеется кнопка «Сброс». ЗУК состоит из принтера и кожуха. Во время работы кожух снимается. Для включения принтера имеется переключатель «Power» (Питание) с двумя положениями «On» (Вкл.) и «Off» (Выкл.).
Контрольные вопросы
1. Назовите основные элементы корпуса прибора ЦП-3.
2. Назовите основные элементы гироблока ЦП-3.
3. Назовите электронные платы, входящие в состав прибора БЭ-3.
4. Для чего предназначены органы управления на блоке питания БП прибора БЭ-3?
5. Для чего предназначены органы управления на плате ПГМ?
6. Для чего предназначены органы управления на платах УСС?
7. Для чего предназначены органы управления на плате СНС?
8. Для чего предназначены органы управления на приборе ПО-3?
9. Для чего предназначен прибор РК и его органы управления?
10. Для чего предназначен прибор 38-Ш и его органы управления?
11. Для чего предназначен прибор 38-РЦ и его органы управления?
12. Для чего предназначен прибор 19-РШ и его органы управления?
13. Для чего предназначены приборы 20-РШ и 21-ГРШ?
14. Для чего предназначен прибор БП-36.001 и его органы управления?
15. Для чего предназначен прибор ТК-1(ТК-2, ТК-3) и его органы управления?
16. Для чего предназначен курсограф 23Ц, какие приборы входят в его состав и органы управления они имеют?
Подготовка к работе, включение и выключение
Перед каждым пуском ГКУ-5 необходимо:
- проверить на корабельных электрощитах (на системе электропитания НК) подаваемое на ГКУ-5 электропитание;
- произвести внешний и внутренний осмотр приборов ГКУ-5. Обратить внимание на подключение всех кабелей, исправность заземления приборов и металлических оплёток кабелей, наличие всех предохранителей в приборах БЭ-3, РК, БП-36.001 и их соответствие требуемым номиналам;
- установить органы управления на приборах в исходные положения:
- открыть крышку РК и все тумблеры установить во включённое положение;
- на ТК тумблеры «220В ГРЩ», «220В АРЩ» и «=24В» во включённое положение,
- открыть крышку ТК и все тумблеры установить во включённое положение;
- на БП-36.001 тумблер «Питание» в положение «Вкл»;
- на ПО-3 переключатель «Север/Юг» в положение полушария, где осуществляется пуск; переключатель «ГК/ГА» в положение «ГК»; переключатели «Широта» в положения 0° («СНС», если имеется такое положение) в случае наличия сопряжения с приёмником СНС (НК), или вручную выставить текущую широту корабля; переключатель «Скорость» в положение «Лаг», если имеется сопряжение с лагом, «СНС» - если имеется сопряжение с приёмником СНС (НК), или вручную выставить значение скорости корабля; ручку регулировки яркости выставить в среднее положение.
Для пуска ГКУ-5 нажать кнопку «Пуск» на ПО-3. На цифровом табло должно высветиться текущее положение платформы относительно диаметральной плоскости корабля. После загорания индикатора «Готовность» ГКУ-5 готов к работе в режиме ГК и на табло «Курс» будет показан курс корабля с предельной погрешностью не более 1,0°. Через 2,5 часа после подачи электропитания ГКУ-5 будет вырабатывать курс с нормированной точностью.
Подготовка курсографа 23Ц производится в следующей последовательности:
- снять кожух с ЗУК;
- заправить бумагу в принтер, поместив её в направляющие и прокрутив валик ручкой на правом торце принтера;
- подать питание на ПСК и ЗУК;
- нажать кнопку «Сброс» на ПСК;
- установить переключатель «Power» на принтере в положение «On»;
- кнопками «Режим», «Выбор», «Набор» установить на индикаторе текущее время и дату;
- установить скорость подачи бумаги 600 мм/час, нажав кнопку «60/600» на ПСК;
- установить ПСК в режим курса, нажав кнопку «Режим». Через 5 минут работы курсографа убедиться в появлении на бумаге изображения курсограммы.
Выключение ГКУ-5 осуществляется нажатием кнопки «Стоп» на ПО-3 и установкой всех тумблеров на ТК, БП-36.001 и РК в положение «Откл».
Осмотр ГКУ-5
Произвести внешний и внутренний осмотр приборов ГКУ-5. Обратить внимание на подключение всех кабелей, исправность заземления приборов и металлических оплёток кабелей, наличие всех предохранителей в приборах БЭ-3, РК, БП-36.001 и их соответствие требуемым номиналам. Проверить крепление блоков, плат и элементов внутри приборов.
Установить органы управления на приборах в исходные положения:
- открыть крышку РК и все тумблеры установить в выключенное положение;
- на ТК тумблеры «220В ГРЩ», «220В АРЩ» и «=24В» установить в выключенное положение, открыть крышку ТК и все тумблеры установить в выключенное положение;
- на БП-36.001 тумблер «Питание» в положение «Выкл»;
- на ПО-3 установить переключатель «Север/Юг» в положение полушария, где осуществляется пуск; переключатель «ГК/ГА» в положение «ГК»; переключатели «Широта» в положения 0о («СНС», если имеется такое положение) в случае наличия сопряжения с приёмником СНС (НК), или вручную выставить текущую широту корабля; переключатель «Скорость» в положение «Лаг», если имеется сопряжение с лагом, «СНС» - если имеется сопряжение с приёмником СНС (НК), или вручную выставить значение скорости корабля; ручку регулировки яркости выставить в среднее положение.
Борьба за живучесть ГКУ-5
В ГКУ-5 осуществляется непрерывный автоматический контроль работоспособности. При неисправностях ГКУ-5, ведущих к неправильной выработке курса, схема автоматического контроля вырабатывает звуковой сигнал неисправности и загорается красный индикатор «Отказ» на ПО-3.
В этом случае необходимо проверить:
- правильность установки переключателей «ШИРОТА», «СКОРОСТЬ» и «СЕВЕР /ЮГ» на ПО-3;
- горение индикатора на плате СНС внутри БЭ-3 при вводе в ГКУ-5 широты и скорости от приёмника СНС (НК). Если индикатор горит постоянно, то широта и скорость из приёмника СНС (НК) не поступают. Перейти на ручной ввод широты и скорости в ГКУ-5;
- горение индикатора над предохранителем 5А на блоке питания прибора БЭ-3, при необходимости заменить предохранитель;
- работу лага при вводе в ГКУ-5 скорости от лага, при неисправности лага перейти на ручной ввод скорости в ГКУ-5;
- горение индикатора хотя бы на одной из плат УСС в БЭ-3. Если он горит, то неисправна следящая система ГКУ-5;
- значение напряжения питания на корабельном распределительном щите (системе электропитания НК), при необходимости отрегулировать напряжение.
Если предпринятые действия не привели к погасанию индикатора «Отказ» на ПО-3, то необходимо выключить ГКУ-5 и, выждав не менее 2 мин, повторно его включить.
В случае быстрого изменения показаний на цифровом табло ПО-3 или репитерах, при неизменном или медленном изменении курса корабля, необходимо немедленно нажать кнопку «Стоп» на ПО-3. Если отработка следящей системы курса превысит 30 град/с (корабль не может циркулировать с такой скоростью), через 8 секунд после возникновения неисправности происходит автоматическое отключение ГКУ-5. Повторное включение ГКУ-5 произвести не ранее, чем через 2 минуты после выключения.
Если после повторного включения ГКУ-5, индикатор «Отказ» вновь загорится или вновь будет наблюдаться быстрое изменение показаний курса, необходимо выключить ГКУ-5 и начать устранение неисправности, пользуясь таблицей характерных неисправностей или обратиться к базовым специалистам или на завод-изготовитель.
Таблица 2
ХАРАКТЕРНЫЕ НЕИСПРАВНОСТИ, УСТРАНЕНИЕ КОТОРЫХ ВОЗМОЖНО ЛИЧНЫМ СОСТАВОМ КОРАБЛЯ (ВЫПИСКА)
| Неисправность | Вероятная причина | Метод устранения |
| 1 | 2 | 3 |
| При включении тумблера «ПИТАНИЕ» на БП-36.001: | ||
| а) не горит индикатор на БП-36.001; | - сгорел предохранитель FU1 либо FU2, либо оба вместе; | - заменить сгоревший предохранитель в БП-36.001; |
| б) горит индикатор на БП-З6.001, но при нажатии на кнопку «ПУСК» на ПО-3 отсутствует индикация на цифровом табло ПО-З | - сгорел предохранитель FU5 | - заменить сгоревший предохранитель в БП-36.001 |
| 1 | 2 | 3 |
| При нажатии на кнопку «ПУСК» на ПО-3 включается подсветка ЦП-3. Присутствует звук вращения гиромотора. Через 1 мин после включения наблюдается быстрое вращение шкалы ЦП-3, которое прекращается через 8с в результате автоматического отключения ГКУ-5 | - неисправность одной из плат УСС. | - заменить одну плату УСС в БЭ-3. Если неисправность осталась, заменить вторую плату УСС, при этом первую плату УСС установить на место |
| При нажатии на кнопку «ПУСК» на ПО-3 включается подсветка ЦП-3. Присутствует индикация курса на ПО-3. Через промежуток времени от 36 до 40 мин после нажатия кнопки «ПУСК» загорается индикатор ОТКАЗ на ПО-3 и включается звуковой сигнал отказа | - неисправность плат ПТ или ПУ | - заменить плату ПТ в БЭ-3. Если неисправность осталась заменить плату ПУ |
| При включении тумблера «ПИТАНИЕ» на БП-36.001: а) не горит индикатор на БП-36.001; | - сгорел предохранитель FU1 либо FU2, либо оба вместе; | - заменить сгоревший предохранитель в БП-36.001; |
| б) горит индикатор на БП-З6.001, но при нажатии на кнопку «ПУСК» на ПО-3 отсутствует индикация на цифровом табло ПО-З | - сгорел предохранитель FU5; | - заменить сгоревший предохранитель в БП-36.001; |
| в) горит индикатор на БП-36.001, но отсутствует подсветка на репитерах | - сгорел предохранитель FU6; | - заменить сгоревший предохранитель в БП-36.001; |
| г) горит индикатор на БП-36.001, но отсутствует подсветка на одном из репитеров | - сгорел предохранитель в БЭ-3; | -заменить сгоревший предохранитель в БЭ-3; |
| 1 | 2 | 3 |
| д) при отсутствии в корабельной сети переменного тока напряжением 220 В, 50 Гц (присутствует питание постоянным током напряжением 24 В от аккумулятора) и нажатии на кнопку «ПУСК» на ПО-3 отсутствует индикация на цифровом табло ПО-З | - сгорел предохранитель в РК; - сгорела лампа подсветки; - сгорел предохранитель FU3 либо FU4, либо оба | - заменить сгоревший предохранитель в РК, соответствующий данному репитеру; - заменить сгоревшую лампу в репитере; - заменить сгоревший предохранитель в БП-36.001 |
| При нажатии кнопки «ПУСК» на ПО-3 отсутствует индикация на цифровом табло ПО-3. Горит индикатор на блоке питания БП в БЭ-3 | - сгорел предохранитель 5А | - заменить сгоревший предохранитель в БЭ-3 на БП |
| Не светится подсветка шкалы ЦП-3 при работе приборов ГКУ-5 | - перегорела лампа подсветки | - заменить фонарь ПИКВ.676515.001 |
| При нажатии на кнопку «ПУСК» на ПО-3 не включается подсветка ЦП-3. Отсутствует звук вращения гиромотора | - неисправен блок питания БП в БЭ-3 | - заменить блок питания БП в БЭ-3 |
| При нажатии на кнопку «ПУСК» на ПО-3 включается подсветка ЦП-3. Отсутствует звук вращения гиромотора. Через 1 мин после включения наблюдается быстрое вращение шкалы ЦП-3, которое прекращается через 8 сек. в результате автоматического отключения ГКУ-5 | - неисправность плат ПГМ или ПТ в БЭ-3, либо неисправность в ЦП-3. | - заменить плату ПГМ в БЭ-3; -если неисправность осталась заменить плату ПТ в БЭ-3; - если неисправность осталась, заменить гироблок (ЦП-3). |
| - неисправность блока БП или плат ПГМ или ПТ в БЭ-3. | - заменить блок питания БП в БЭ-3; - если неисправность осталась, заменить плату ПГМ в БЭ-3; - если неисправность осталась заменить плату ПТ в БЭ-3 | |
| 1 | 2 | 3 |
| Завышенное значение установившейся погрешности курсоуказания ГКУ-5 | - при ручном вводе широты: а) ошибка при вводе широты; б) неисправность плат ПФС, ПУ, ПТ в БЭ-3; - при вводе широты от приемника СНС (НК): | - правильно ввести широту места нахождения корабля; - заменить поочередно платы ПФС, ПУ и ПТ; - проверить и в случае неисправности заменить приемник СНС; |
| а) неисправность приемника СНС (неисправность в НК); б) неисправна плата СНС; - изменение собственного дрейфа гироблока; - неисправность гироблока | - заменить плату СНС; - провести компенсацию собственных дрейфов гироблока в соответствии с п.8.3.4 - заменить гироблок (ЦП-3) |
П р и м е ч а н и е: для устранения перечисленных в таблице неисправностей используется комплект одиночного ЗИП. Замена плат и блоков, входящих в ЗИП, производится в соответствии с инструкцией по использованию одиночного комплекта ЗИП ПИКВ.461524.003 ИИ.
Контрольные вопросы
1. Что нужно сделать для подготовки ГКУ-5 к пуску?
2. Как производится пуск и выключение ГКУ-5?
3. В каких режимах используется ГКУ-5 в зависимости от внешних условий?
4. Как производится коммутация ввода внешней информации в ГКУ-5?
5. На какие виды делится техническое обслуживание ГКУ-5?
6. Как выполняется проверка сопротивления изоляции ГКУ-5?
7. Как выполняется проверка времени готовности к использованию?
8. Как выполняются определение и компенсация постоянной поправки и горизонтного дрейфа?
9. Как выполняются определение и компенсация азимутального дрейфа?
10. Как выполняется проверка согласования ПО-3 и репитеров курса?
11. Как выполняется проверка параметров следящей системы курса?
12. Как выполняется проверка выставки в ДП пеленгаторных репитеров?
13. Как выполняется проверка погрешности скоростной коррекции?
14. Какие первичные действия необходимо предпринять в случае загорания индикатора «Отказ» на ПО-3?
15. Какие первичные действия необходимо предпринять в случае быстрого изменения показаний на цифровом табло ПО-3 и репитерах?
16. Какие действия необходимо предпринять если первичные действия не привели к устранению неисправности ГКУ-5?
Литература
1. Берещук А. И., Лабутин С.Ф., Химич П. Г. Основы устройства и эксплуатации гироскопического курсоуказателя ГКУ-1. -СПб: СПб ВМИ, 2007.
2. Клименко А. Н., Позняк В.К., Радосавлевич Б .Д. Технические средства навигации подводных лодок, ч. 1. -СПб: СПб ВМИ, 2005.
3. Лаврентьев А.В. и др. Гироскопические и инерциальные навигационные системы. -СПб: ВВМУ, 1994.
4. Лаврентьев А. В. и др. Морские средства навигации надводных кораблей, ч. 1. -СПб: СПб ВМИ, 2007.
5. Парамонов А. Б. Курс лекций по учебной дисциплине «Основы эксплуатации и ремонта морских средств навигации». -СПб: СПб ВМИ, 2007.
6. Ривкин С.С. Теория гироскопических устройств, ч.1.-Л.: Судпромгиз, 1962.
7. Смирнов Е. Л. Технические средства судовождения, ч.1. -М.: Транспорт, 1988.
8. Гирокурсоуказатель ГКУ-5. Руководство по эксплуатации.
ПИКВ.461524.003 РЭ-Э.
Оглавление
| Методические рекомендации по изучению ГКУ-5 в теме 12 дисциплины ЭМСН и пользованию данным пособием | 2 |
| Введение | 4 |
| Г л а в а 1. ОБЩИЕ СВЕДЕНИЯ О ГИРОКУРСОУКАЗАТЕЛЕ ГКУ-5 … … … … … … … … … … … … … … … … .. | 6 |
| 1.1. Назначение ГКУ-5 … … … … … … … … … … … … | 6 |
| 1.2. Технические данные ГКУ-5 … … … … … … … … … . | 7 |
| 1.3. Состав ГКУ-5 … … … … … … … … … … … … … .. | 9 |
| 1.4. Устройство и основные свойства динамически настраиваемого гироскопа … … … … … … … … … … … ... ... | 10 |
| Контрольные вопросы … … … … … … … … … … … … … | 10 |
| Г л а в а 2. РАБОТА ГКУ-5 В РАЗЛИЧНЫХ РЕЖИМАХ … … | 16 |
| 2.1. Работа ГКУ-5 в подготовительном подрежиме режима «ГИРОКОМПАС» … … … ... … … … … … … … … … … | 16 |
| 2.2. Работа ГКУ-5 в режиме «ГИРОКОМПАС» … … … ... | 23 |
| 2.3. Работа ГКУ-5 в режиме «ГИРОАЗИМУТ» … … … … | 25 |
| 2.4. Работа системы стабилизации ГКУ-5 … … … … … … | 27 |
| 2.5. Работа ГКУ-5 по функциональной схеме … … … .. | 28 |
| 2.6. Основные погрешности работы ГКУ-5 … … … … … . | 32 |
| Контрольные вопросы … … … … … … … … … … … … … | 38 |
| Г л а в а 3. УСТРОЙСТВО ПРИБОРОВ ГКУ-5 … … … … … … … … | 40 |
| 3.1. Устройство прибора ЦП-3 … … … … … … … … … … | 40 |
| 3.2. Устройство прибора БЭ-3 … … … … … … … … … … | 45 |
| 3.3. Устройство прибора ПО-3 … … … … … … … … … … | 48 |
| 3.4. Устройство прибора РК … … … … … … … … … … … | 49 |
| 3.5. Устройство прибора 38-РШ … … … … … … … … … ... | 49 |
| 3.6. Устройство прибора 38-РЦ … … … … … … … … … … | 50 |
| 3.7. Устройство прибора 19-РШ … … … … … … … … … | 51 |
| 3.8. Устройство приборов 20-РШ И 21-ГРШ … … … … … | 52 |
| 3.9. Устройство прибора БП-36.001 … … … … … … … … | 52 |
| 3.10. Устройство прибора ТК-1 (ТК-2, ТК-3) … … … … … . | 53 |
| 3.11. Устройство прибора 23Ц … … … … … … … … … … | 54 |
| Контрольные вопросы … … … … … … … … … … … … … | 55 |
| Г л а в а 4. ЭКСПЛУАТАЦИЯ ГКУ-5 … … … … … … … … … … | 56 |
| 4.1. Подготовка к работе, включение и выключение … … … | 56 |
| 4.2. Использование ГКУ-5 по назначению … … … … … … . | 57 |
| 4.3. Техническое обслуживание ГКУ-5 … … … … … … … . | 59 |
| 4.4. Борьба за живучесть ГКУ-5 … … … … … … … … … . | 73 |
| Контрольные вопросы … … … … … … … … … … … … … | 78 |
| Литература … … … … … … … … … … … … … … … … … … … … … . | 79 |
Учебное издание
Курсоуказатель гку-5
Редактор И. А. Кулакова
Пост. в производство Подписано в печать Формат 60х841/16.
Усл. печ.л. 4,53. Уч.-изд. л. 3,39. Тираж 100 экз. Зак.
Бесплатно
ЛПУ ЛИТ № 2 ВМИ ВУНЦ ВМФ «ВМА»
В в е д е н и е
В настоящее время продолжается совершенствование гироскопических курсоуказателей для ВМФ РФ. Их развитие происходит по пути применения новых типов чувствительных элементов (гироскопов и акселерометров), новой электронной и электромеханической базы, что приводит к снижению весогабаритных характеристик и потребления электроэнергии, упрощению правил использования и технического обслуживания. К перспективным двухрежимным гирокурсоуказателям относится ГКУ-5, который устанавливается практически на всех строящихся и модернизируемых кораблях и судах ВМФ в качестве основного или резервного курсоуказателя.
В ГКУ-5 применен динамически настраиваемый гироскоп (ДНГ) ГВК-6, который имеет средние точностные характеристики, малый вес и габариты, не требует высокоточной системы термостабилизации и имеет высокую устойчивость к механическим и климатическим воздействиям. Такой гироскоп имеет внутренний упругий подвес, а значит его динамическая характеристика - скорость собственного вращения вокруг главной оси, должна быть настроена так, чтобы изгибы подвеса, обеспечивающие повороты гироскопа вокруг экваториальных осей, не приводили к дрейфам гироскопа от необходимого положения. Моменты инерции ГВК-6 малы, что способствует снижению потребления электроэнергии и возможности использования для его работы двухфазного тока. Управление гироскопом осуществляется с помощью маломощных электромагнитных датчиков момента.
Также, отличительными особенностями ГКУ-5 от прежних двухрежимных курсоуказателей является применение в системе стабилизации двигателей моментного типа и безредукторных следящих систем.
В ГКУ-5 установлен один акселерометр, работающий в режиме индикатора горизонта. Поэтому, отсутствует автоматический переход в режим гироазимута во время манёвра корабля. Положительным при этом является то, что ДНГ не теряет чувствительность к горизонту, как это происходит у ГКУ-1, когда суммарный сигнал двух индикаторов горизонта становится равным нулю. Так как, во время маневрирования, ГКУ-5 продолжает работать в режиме гирокомпаса (если вручную не переключён в режим гироазимута), то необходимо поддерживать его настройку на период Шулера в любой широте. Для этого в ГКУ-5 применён простой способ регулировки направляющего момента за счёт деления сигнала индикатора горизонта на косинус широты.
Для упрощения устройства в ГКУ-5 отсутствуют пороговое устройство, ограничивающее сигнал от индикатора горизонта во время манёвра и фильтр низкой частоты, ослабляющий влияние качки на сигналы управления гироскопом. Также, отсутствуют: схема интегральной коррекции для автоматического определения азимутального дрейфа гироскопа и все виды дрейфов можно определить только вручную, и блок стабилизации, предназначенный для повышения устойчивости следящих систем во время качки или при постоянном наклоне корабля.
Выработка курса в ГКУ-5 осуществляется в плоскости палубы, что приводит к наличию карданной погрешности, а гироазимутальный курс может вырабатываться только локсодромический, что не позволяет в высоких широтах отключить выработку величины, которая пропорциональна тангенсу широты. Также в ГКУ-5 не предусмотрена выработка квазигеографического курса.
Несмотря на указанные упрощения, ГКУ-5 полностью соответствует международным и российским требованиям и стандартам в области судовождения. Для штурманов кораблей и судов его основными достоинствами являются простота эксплуатации, возможность использования в сложных гидрометеорологических условиях под воздействием качки, наклонов, вибрации и ударов корпуса корабля. По своим точностным и временным параметрам, надёжности, ГКУ-5 не уступает другим гироскопическим курсоуказателям, находящимся на вооружении ВМФ РФ.
Настоящее учебно-методическое пособие базируется на документе «Гирокурсоуказатель ГКУ-5. Руководство по эксплуатации. ПИКВ. 461524. 003 РЭ-Э». В пособии рассмотрены вопросы принципа работы, устройства, причин возникновения и компенсации погрешностей, использования по назначению и технического обслуживания ГКУ-5. Пособие предназначено для курсантов и слушателей высших и средних военно-морских учебных заведений и может быть использовано офицерами БЧ-1 при освоении ими ГКУ-5.
Автор благодарит преподавателей цикла кораблевождения специального факультета подготовки иностранных экипажей ВУНЦ ВМФ «ВМА» за помощь в подготовке данного пособия.
Г л а в а 1. ОБЩИЕ СВЕДЕНИЯ
О ГИРОКУРСОУКАЗАТЕЛЕ ГКУ-5
Назначение ГКУ-5
Двухрежимный гирокурсоуказатель ГКУ-5 предназначен для определения географического курса и угловой скорости циркуляции корабля в режимах гирокомпаса или гироазимута.
ГКУ-5 используется при плавании в широтах от 0°до 85°N(S) в режиме гирокомпаса ГК и в широтах от 0°N(S)до 90°N(S) в режиме гироазимута ГА при скорости корабля до 70 уз в условиях:
- температуры окружающей среды от (-10)°С до +55°С (для пеленгаторных репитеров, пелорусов и пеленгаторов от (-40)°С до +65°С);
- давления от 600 мм рт. ст. до 1520 мм рт. ст;
- бортовой качки с амплитудой до 30° и периодом от 6 до 15 с;
- килевой качки с амплитудой до 10° и периодом от 6 до 15 с;
- рысканья с амплитудой до 5° и периодом от 6 до 15 с;
- постоянного крена и дифферента до 45°;
- колебания напряжения корабельной сети переменного тока в пределах 220±22 В, частоты в пределах 50±3 Гц и напряжения постоянного тока в пределах 19,2-31,2 В.
В режиме ГА ГКУ-5 может использоваться в любой широте при резкопеременном движении корабля (например, при выработке данных стрельбы) т. к. курс в этом режиме более устойчив к маневрированию, чем в режиме ГК. При этом погрешность курса ГКУ-5 будет нарастать с увеличением времени его использования в этом режиме.
В указанных условиях ГКУ-5 обеспечивает:
- определение курса от плоскости географического меридиана;
- дистанционную передачу курса аналоговым и цифровым приёмникам;
- дистанционную передачу информации об угловой скорости циркуляции корабля аналоговым приёмникам (при заказе данной функции на заводе-изготовителе);
- автоматический прием сигналов скорости и широты от спутниковой навигационной системы (от навигационного комплекса);
- автоматический прием сигнала скорости от лага;
- ручной ввод скорости и широты;
- дистанционное управление и контроль с единого пульта оператора.
ГКУ-5 выполняет свои функции и сохраняет свои параметры после воздействия следующих внешних факторов:
- предельной температуры воздуха от (-60)°С до +70°С;
- повышенной относительной влажности воздуха до 98 % при температуре +40°С;
- механического удара с пиковым ускорением до 147 м/с2 (15g) и длительностью импульса от 5 до 15 мс.
Технические данные ГКУ-5
1. Предельная (P = 0,95) погрешность курса в режиме ГК составляет:
- в диапазоне широт от 70°S до 70°N при скорости корабля до 70 узлов от ±0,3° (ошвартованный корабль на ровном киле на экваторе) до ±2,7° (любой режим движения корабля при допустимой качке);
- в диапазоне широт от 70° до 85° северной или южной широты при скорости корабля до 70 узлов ±3,0о (любой режим движения корабля при допустимой качке);
2. Увеличение предельной погрешности курса (азимутальный дрейф) в режиме ГА составляет:
- в диапазоне широт от 70°S до 70°N при скорости корабля до 70 уз от ±0,2°/ч (ошвартованный корабль на ровном киле) до ±0,5°/ч (любой режим движения корабля при допустимой качке);
- в диапазоне широт от 70° до 90° северной или южной широты при скорости корабля до 70 узлов от ±0,5°/ч (ошвартованный корабль на ровном киле) до ±1,0°/ч (любой режим движения корабля при допустимой качке);
- погрешности, вызванные конкретными причинами и суммарные погрешности, указаны в табл. 1.
Таблица 1
| Наименование погрешности | Значение в широтах, j | |
| j £ 70° | 70°< j < 90° | |
| 1 | 2 | 3 |
|
Режим ГК | ||
| 1.Установившаяся погрешность (с обратным знаком соответствует постоянной поправке на ошвартованном корабле при качке до 1°) | ±0,3° sесj | - |
| 2. Статическая погрешность в одном пуске (равна среднеквадратическому значению разностей между отдельными и средним значениями компасного пеленга на ориентир) | ±0,2° sесj | - |
| 3. Нестабильность установившейся погрешности от пуска к пуску (равна разнице постоянных поправок, определённых в двух пусках с разницей во времени не менее 6 часов) | ±0,25° sесj | - |
| 4. Погрешность компенсации скоростной погрешности на прямом курсе при постоянной скорости до 70 уз | ±0,2° sесj | - |
| 5. Погрешность вызванная качкой с горизонтальным ускорением до 1 м/с2 | ±0,6° sесj | - |
| 6. Погрешность, вызванная быстрым изменением скорости корабля на величину до 70 уз | ±2,0° | - |
| 7. Погрешность, вызванная быстрым изменением курса на величину до 180° при скорости до 70 уз и при максимальной скорости циркуляции 20°/с | ±2,5° | - |
| 8. Погрешность при любом режиме движения корабля при скорости до 70 уз и при качке с горизонтальным ускорением до 1м/с2 | ±2,7° | ±3,0° |
|
Режим ГА | ||
| 1. Скорость азимутального дрейфа (ухода) на ошвартованном корабле при качке до 1° | ± 0,2°/ч | ± 0,5°/ч |
| 1 | 2 | 3 |
| 2. Скорость азимутального дрейфа (ухода) при движении на прямом курсе при постоянной скорости корабля до 70 уз | ± 0,2°/ч | ± 0,5°/ч |
| 3. Скорость азимутального дрейфа (ухода) при любом режиме движения корабля при скорости до 70 уз | ± 0,5°/ч | ± 1,0°/ч |
3. Время готовности ГКУ-5 к навигационному использованию в широтах до 70°N(S) при нормальной температуре окружающей среды (25±10)° на неподвижном корабле, стоящем на ровном киле, составляет от 25 до 60 мин.
Время готовности ГКУ-5 к навигационному использованию в широтах от 70° до 85°N(S), при температуре окружающей среды, отличной от нормальной, в условиях бортовой и килевой качки может увеличиться до 120 мин.
В обоих случаях при готовности ГКУ-5 к навигационному использованию погрешность курса составит не более ±1°. С нормированной точностью ГКУ-5 начинает вырабатывать курс через 2,5 часа после включения.
4. Электропитание ГКУ-5 осуществляется от корабельной однофазной сети переменного тока 220 В 50 Гц от главного ГРЩ или аварийного АРЩ распределительных щитов по двум независимым линиям или корабельной аварийной сети постоянного тока напряжением 24 В. Если ГКУ-5 включён в состав навигационного комплекса НК, то он получает постоянный ток 24 В из системы электропитания НК.
5. Назначенный ресурс работы ГКУ-5 до капитального ремонта - 30000 ч.
6. Срок службы ГКУ-5 до списания - 12 лет.
Состав ГКУ-5
ГКУ-5 может поставляться в различных комплектациях. Комплектации различаются назначением, типом периферийных приборов и видом используемой корабельной электросети.
Комплектация ГКУ-5 ПИКВ.461524.003 является базовой, используется для вновь строящихся кораблей или судов. Максимальный комплект включает в себя:
- ЦП-3- центральный прибор - 1 шт;
- БЭ-3 - блок электронный - 1 шт;
- ПО-3 -пульт оператора - 1 шт;
- РК - распределительная коробка - 1 шт;
- БП-36.001 - блок питания - 1 шт;
- 38-РШ - репитер аналоговый - (количество зависит от проекта корабля);
- 38-РЦ - репитер цифровой - (количество зависит от проекта корабля);
- 19-РШ – репитер пеленгаторный - (количество зависит от проекта корабля);
- 20-РШ - пелорус палубный - (количество зависит от проекта корабля);
- 21-ГРШ - пелорус настольный - (количество зависит от проекта корабля);
- ПГК-2 - оптический пеленгатор - 2 шт;
- эксплуатационный одиночный комплект ЗИП - 1 шт;
- комплект технической документации - 1 шт.
В другие комплектации ГКУ-5 могут дополнительно входить приборы:
- 23Ц – курсограф - 1 шт;
- ТК1(2,3) - транслятор курса потребителям - 1 шт;
- РБП – расширитель бортового питания - 1 шт;
- ПК1 – переключатель каналов основного и резервного курсоуказания - 1 шт.
1.4. Устройство и основные свойства динамически
настраиваемого гироскопа
ГКУ-5 представляет собой двухрежимный, корректируемый гирокурсоуказатель с использованием в качестве чувствительного элемента динамически настраиваемого гироскопа ДНГ, обеспечивающего требуемую точность курсоуказания, устойчивость к механическим и климатическим воздействиям. Для управления и коррекции ДНГ применена электронная схема, устраняющая скоростную, широтную и другие погрешности, что позволяет эффективно использовать ГКУ-5 при любом режиме движения корабля. После включения ГКУ-5, схема управления обеспечивает автоматическое горизонтирование и приведение гироскопа в плоскость меридиана, а также последующую работу ГКУ-5 в режимах ГК и ГА.
Главным конструктивным отличием ДНГ от гироскопов других двухрежимных гирокурсоуказателей [1], является внутренний упругий вращающийся подвес (рис.1). Упругий подвес находится внутри тороидального ротора. Тороидальный ротор является носителем кинетического момента H, поэтому является гироскопом. Данный гироскоп является уравновешенным трёхстепенным управляемым и корректируемым гироскопом с внутренним упругим подвесом. Он имеет полную свободу вращения вокруг главной оси и, ограниченную углами закручивания упругих элементов, свободу вращения вокруг экваториальных осей. Через упругий подвес ротор крепится к валу электродвигателя (гиромотора).
Рис. 1. ДНГ модели ГВК-6 ГКУ-5
Собственное вращение гироскопа создаётся валом электродвигателя через упругий подвес. Электродвигатель установлен на платформе, которая, в свою очередь, находится в карданном подвесе. Карданный подвес, состоящий из внутренней и наружной рамок, обеспечивает платформе три степени свободы, т. е. повороты вокруг осей YпZпXп. Главными осями платформы и гироскопа являются оси Yп и Y, соответственно. Вертикальными осями являются оси Zп и Z, соответственно, которые направленны вверх, а правую систему осей дополняют оси Xп и X соответственно.
Углами отклонения главных осей платформы и гироскопа от плоскости меридиана являются углы αп и α соответственно, от плоскости горизонта – βп и β соответственно, а углами отклонения осей Xп и X платформы и гироскопа от плоскости горизонта – θп и θ соответственно.
Основной особенностью данной конструкции является чрезвычайно слабая связь через упругий подвес между гироскопом и остальными элементами, включая стабилизированную платформу. Поэтому, влияние вредных моментов действующих на все элементы конструкции, за исключением гироскопа, на точность выработки курса значительно снижается.
Создание полезных моментов для управления ДНГ осуществляется путём воздействия моментов сил электромагнитной индукции датчиков моментов ДМX и ДМZ, установленных внутри корпуса ДНГ, на ротор. Для этого датчики моментов стремятся развернуть гироскоп вокруг осей X и Z. При этом может изогнуться упругий подвес вокруг этих же осей. Напрашивается следствие, что изогнутый упругий подвес, обладая жёсткостью, будет создавать и прикладывать к гироскопу вредные моменты, понижающие точность выработки курса. Однако у ДНГ имеется свойство динамической настройки, которая производится на заводе-изготовителе. Вредные моменты жёсткости изогнутого подвеса могут быть скомпенсированы инерционными моментами (центробежными и кориолисовыми) самого упругого подвеса. Инерционные моменты зависят от осевого и экваториальных моментов инерции упругого подвеса и скорости собственного вращения гироскопа. Моменты жёсткости упругого подвеса определяются вдоль осей X или Z как:
=2 и =2kα (1.1)
соответственно,
где k – коэффициент жёсткости упругого подвеса при его изгибе.
Общие инерционные моменты упругого подвеса определяются вдоль осей X или Z как:
= Ω2(B + C - A) = Ω2(B + C- A)α, (1.2)
соответственно,
где A – осевой момент инерции упругого подвеса относительно главной оси Y;
B – экваториальный момент инерции упругого подвеса относительно оси X;
C - экваториальный момент инерции упругого подвеса относительно оси Z;
Ω – угловая скорость собственного вращения гироскопа.
Подбором угловой скорости собственного вращения гироскопа, моментов инерции упругого подвеса и коэффициента жёсткости упругих элементов можно добиться условия динамической настройки гироскопа, при котором Мж = Ми вдоль каждой из осей X и Z. Тогда, из соответствующих равенств, можно определить:
. (1.3)
Данное условие динамической настройки ДНГ характеризует такое свойство динамически настраиваемого гироскопа с внутренним подвесом, при котором упругий подвес, осуществляя точное линейное совмещение центра тяжести гироскопа с центром его подвеса, не прикладывают к гироскопу вредных моментов при любых его поворотах вокруг осей X и Z. Для сохранения динамической настройки в процессе эксплуатации нестабильность угловой скорости собственного вращения Ω гироскопа должна быть в пределах 0,01–0,001% от нормированного значения.
ДНГ отличается очень малыми размерами и массой (масса его тороидального ротора вместе с упругим подвесом составляет примерно 50 г), что позволяет применять маломощные датчики моментов и электродвигатель привода.
Контрольные вопросы
1. Для чего предназначен ГКУ-5?
2. Чем, с практической точки зрения, отличаются режимы ГК и ГА ГКУ-5?
3. При каких параметрах движения корабля, внешней среды и электропитания можно использовать ГКУ-5?
4. Какие основные функции обеспечивает ГКУ-5?
5. С какой точностью ГКУ-5 вырабатывает курс в режиме ГК и от чего зависит эта точность?
6. Из-за какой величины в режиме ГА у ГКУ-5 нарастает с течением времени погрешность курса, какова скорость нарастания в различных условиях?
7. Каково время готовности ГКУ-5 к использованию в зависимости от внешних условий?
8. Какими видами электропитания нужно обеспечить ГКУ-5 для его работы?
9. Какие приборы входят в состав ГКУ-5 в зависимости от его комплектации?
10. Каковы главные конструктивные отличия гироскопа ДНГ от гироскопов других гирокурсоуказателей?
11. Перечислите все характеристики ДНГ.
12. В чём заключается условие динамической настройки ДНГ?
13. От чего зависит сохранение динамической настройки ДНГ в процессе эксплуатации ГКУ-5?
Г л а в а 2. РАБОТА ГКУ-5 В РАЗЛИЧНЫХ
РЕЖИМАХ
Дата: 2019-07-31, просмотров: 1331.