Система в дискретном времени имеет вид:
dt=24 c.

Зададим  ,
,  , получим значения на выходах дискретной системы, которые совпадают с расчетом задания в п.4.
, получим значения на выходах дискретной системы, которые совпадают с расчетом задания в п.4.
Таблица 6 Значение выходов дискретной системы
| Возмущение | Реакция выхода системы y(t) | |||||||||||
| u1=0.01
u2=0 | y1 y2 10-3 | 0 | 0 | 3.874 | 6.247 | 7.701 | 8.591 | 9.137 | 9.471 | 9.676 | 9.802 | 9.878 |
| 0 | 0 | -2.548 | -3.523 | -3.896 | -4.038 | -4.093 | -4.114 | -4.122 | -4.125 | -4.126 | ||
| такт | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |

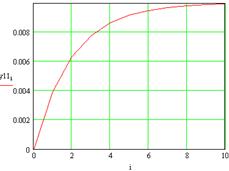
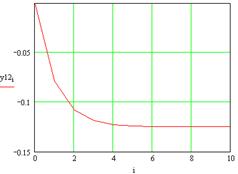
Рисунок 10 – Реакция выходов системы на возмущения u (t)
Построение графиков кривой разгона нелинейной системы
Данные для построения графиков получены в пункте 1.1.2
Для первого выхода пользуемся таблицей 1. Получившиеся графики можем сопоставить с графиками полученным в пункте 1.3.1, введя поправку на начальное значение параметра
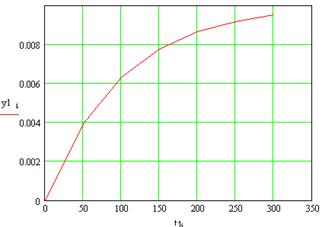
Рисунок 11 – Реакция первого выхода на возмущения u1(t) в пункте 1.3.1
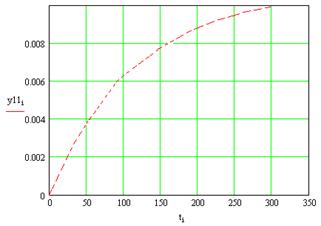
Рисунок 12 – Реакция первого выхода на возмущение для линеаризованной системы
Легко видеть, что эти график совпадают, что говорит о том, что линеаризация по первому выходу проведена на приемлемом уровне
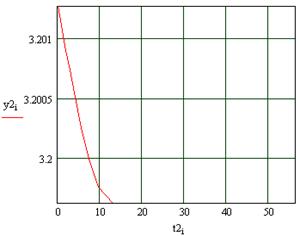
Рисунок 14 – Реакция второго выхода на возмущения u1(t) полученного в пункте 1.3.1

Рисунок 13 – Реакция второго выхода на возмущения для линеаризованной системы
В данном случае имеет место погрешность которую можно связать с ошибкой вносимой кусочно – линейной аппроксимации.
Установившиеся состояния системы
Вычислить постоянное значение состояния системы в условиях


Т.к. установившееся значение предполагает отсутствие динамики, то систему можно записать в следующем виде


Идентификация многомерной математической модели по данным эксперимента
Активная идентификация
Для дискретной формы системы ( F , G , C ) из пункта 3. 1. провести реализацию системы.
Запишем систему в виде:


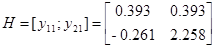
Подавая импульс по первому входу, рассчитаем:










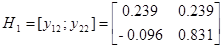
Теперь имея экспериментальные данные, сгруппировав их в матрицы H и H 1 можем приступить к их обработки.
Из собственных векторов от (  ) и (
) и (  ) построим:
) построим:





Для проверки идентификации найдем коэффициент передачи системы

Коэффициент передачи, вычисленный по исходным матрицам

Можно сделать вывод о том, что система идентифицирована, верно
Пассивная идентификация
Для дискретной формы системы (F, G, C) из пункта 3. 1. провести пассивную идентификацию системы, предполагая, что вектор входа изменяется соответственно таблице:
Таблица 7 Значение вектора входа для пассивной идентификации.
| Такт, n | 0 | 1 | 2 | 3 | 4 | 5 |
| U(n) | 0.01 | 0 | 0 | 0.04 | 0 | 0 |
| 0 | 0.01 | 0.02 | 0 | 0.03 | 0 |

Используя матрицы системы в дискретной форме для заданных значений вектора входа, рассчитаем значения вектора выхода

Результаты расчета сведем в таблицу:
| Такт, n | 1 | 2 | 3 | 4 | 5 | 6 |
| y(n) | 0.003935 | 0.006321 | 0.012 | 0.023 | 0.026 | 0.016 |
| -0.0026 | 0.022 | 0.053 | 0.0091 | 0.071 | 0.026 |
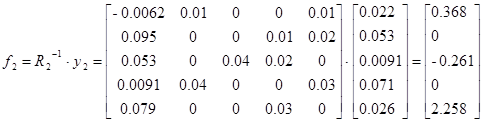
Используя данные эксперимента (Таблица 8) можем приступить непосредственно к определению параметров идентифицированной системы
Тогда

Для проверки идентификации найдем коэффициент передачи системы

Система идентифицирована, верно
Дата: 2019-07-30, просмотров: 308.