Введение
Проблема модернизации системы управления смесительного бака с целью улучшения его техника – экономических показателей требует решения следующих задач.
Исследование свойств технологического агрегата как многомерной системы для чего необходимо провести эквивалентное и аппроксимационое преобразование модели; провести анализ качественных и количественных свойств системы; идентифицировать многомерную математическую модель по данным эксперимента.
Конструирование многомерных регуляторов для рассматриваемого смесительного бака:
П. – регулятор, апериодический регулятор, децентрализованный регулятор, надежный регулятор, блочно – иерархический регулятор, регулятор для билинейной и для нелинейной модели, программный регулятор.
Оценка качества в замкнутой автоматической системы регулирования и выбор наилучшего типа регулятора.
Исследование свойств технологического агрегата как многомерной системы
Многомерная математическая модель агрегата
Нелинейная модель агрегата
Вывод нелинейной модели агрегата. На примере рассмотрим конкретную техническую систему – смесительный бак:
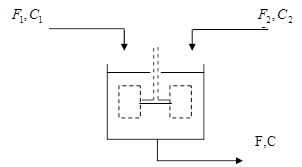
Рисунок 1. Модель бака
F1,F2,F - потери жидкости на истоке и притоке системы, м3/с;
C1,C2,C - концентрация на истоке и притоке системы, Кмоль/м3;
h - уровень жидкости в баке, м;
S - площадь бака,м2;
V - объем жидкости в баке,м3;
Запишем уравнение системы в стационарном (установленном) состоянии, когда приток равняется истоку (уравнение материального баланса):
F10+F20-F0=0 ; C1  ,
,
где индекс 0 означает установившееся состояние.
Записавши условия баланса кинетической и потенциальной энергии на выходе из бака (имеется в виду, что жидкость вытекает самостоятельно)
 ,
,
где
p - плотность жидкости, кг/м3;
w - скорость истока, м/с;
q - ускорение свободного падения,q=9.81 м/с2;
и допуская, что
d - диаметр выходного трубопровода, м.
Получим:
 ,
,
 ,
,
где
k – коэффициент.
При изменении потерь в системе происходит накоплении вещества и переход до нового установленного состояния. Этот переходный процесс описывается дифференциальными уравнениями
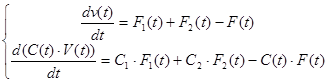
Где dv/dt – приращение объема жидкости,  - прирост массы жидкости.
- прирост массы жидкости.
Приведем эту систему в стандартном состоянии:
Обозначим:
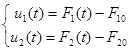
 – изменение во времени отклонения потери от номинального по отношению к первому каналу.
– изменение во времени отклонения потери от номинального по отношению к первому каналу.
 – изменение во времени отклонения потери от номинального по отношению ко второму каналу.
– изменение во времени отклонения потери от номинального по отношению ко второму каналу.
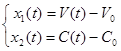
 – изменение во времени отклонения объема от номинального в баке;
– изменение во времени отклонения объема от номинального в баке;
 – отклонение концентрации от номинального значения;
– отклонение концентрации от номинального значения;
 – изменение потерь на выходе;
– изменение потерь на выходе;
 – изменение концентрации на выходе.
– изменение концентрации на выходе.
Запись билинейной модели
Уравнение билинейной системы записывается в виде

Приняв допущение, что критерий оптимальности в форме О.А. Красовского

регулятор определяется по зависимости 
Где матрица определена как 
Линеаризованная модель
Линеаризуем зависимость  , разложив ее на ряд Тейлора.
, разложив ее на ряд Тейлора.



С учетом ранее изложенного запишем:

 ; (т.к.
; (т.к.  ), где
), где  ;
;

Припустив в случае остатка  . Тогда, подставив производную
. Тогда, подставив производную  , получим
, получим



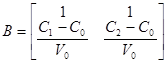
Представим систему в матричной форме:
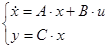
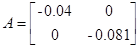
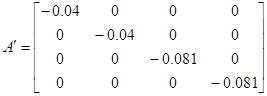
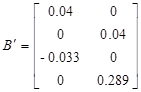
Тогда матрицы А и В запишутся в виде
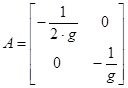 ,
, 
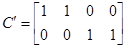
Для определения матрицы С необходимо установить связь между векторами x и y. Т.к.  ,
,  , то
, то
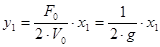 ;
; 
 , то
, то 
Тогда
Система будет иметь вид
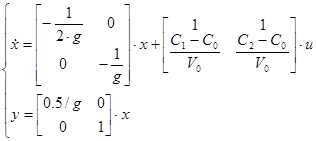
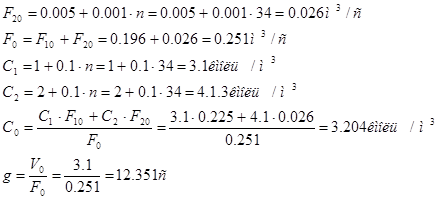
Коэффициенты модели системы:


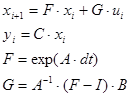
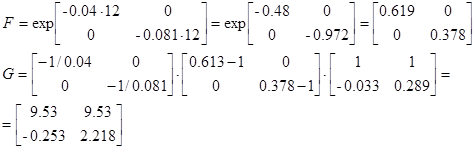
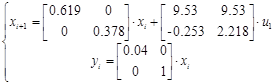
Модель в дискретном времени
Система в дискретном времени имеет вид:
dt= 24 c.
Зададим  ,
,  , получим значения на выходах дискретной системы.
, получим значения на выходах дискретной системы.
Таблица 4 Значение выходов дискретной системы
| Возмущение | Реакция выхода системы y(t) | |||||||
| u1=0.01 u2=0 | y1 y2 | 0 0 | 0.00384 -0.00254 | 0.00624 -0.00352 | 0.0077 -0.03896 | 0.00859 -0.004038 | 0.00913 -0.00409 | 0.00947 -0.00411 |
| время t, с | 0 | 12 | 24 | 37 | 49 | 61 | 74 | |
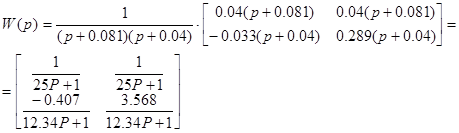
1.1.7 Преобразование модели в форме Ассео





Внешне связное форму получаем из матрицы передаточных функций




Вычисление МПФ системы
 ;
;  ;
;  ; n=2; i=1;
; n=2; i=1; 






Активная идентификация
Для дискретной формы системы ( F , G , C ) из пункта 3. 1. провести реализацию системы.
Запишем систему в виде:


Подавая импульс по первому входу, рассчитаем:










Теперь имея экспериментальные данные, сгруппировав их в матрицы H и H 1 можем приступить к их обработки.
Из собственных векторов от (  ) и (
) и (  ) построим:
) построим:





Для проверки идентификации найдем коэффициент передачи системы

Коэффициент передачи, вычисленный по исходным матрицам

Можно сделать вывод о том, что система идентифицирована, верно
Пассивная идентификация
Для дискретной формы системы (F, G, C) из пункта 3. 1. провести пассивную идентификацию системы, предполагая, что вектор входа изменяется соответственно таблице:
Таблица 7 Значение вектора входа для пассивной идентификации.
| Такт, n | 0 | 1 | 2 | 3 | 4 | 5 |
| U(n) | 0.01 | 0 | 0 | 0.04 | 0 | 0 |
| 0 | 0.01 | 0.02 | 0 | 0.03 | 0 |

Используя матрицы системы в дискретной форме для заданных значений вектора входа, рассчитаем значения вектора выхода

Результаты расчета сведем в таблицу:
| Такт, n | 1 | 2 | 3 | 4 | 5 | 6 |
| y(n) | 0.003935 | 0.006321 | 0.012 | 0.023 | 0.026 | 0.016 |
| -0.0026 | 0.022 | 0.053 | 0.0091 | 0.071 | 0.026 |
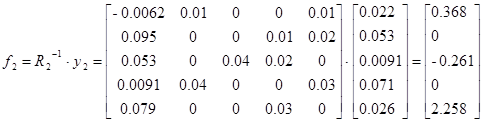
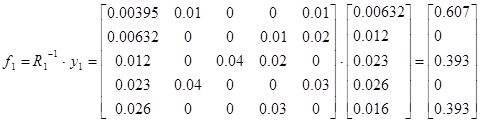
Используя данные эксперимента (Таблица 8) можем приступить непосредственно к определению параметров идентифицированной системы
Тогда

Для проверки идентификации найдем коэффициент передачи системы

Система идентифицирована, верно
В ыводы
Исследован технический объект – смесительный бак. Получен спектр модели: линейная, нелинейная, экспериментальная и аналитическая модель. Проведены эквивалентное аппроксимационое преобразование модели агрегата
Исследованы качественные и количественные свойства системы. Разработаны регуляторы управления объектом: П. – регулятор;
апериодический регулятор; надежный регулятор; блочно – иерархический регулятор; регулятор для билинейной и для нелинейной модели; программный регулятор; регулятор с компенсатором взаимосвязей. А также компенсаторы возмущений и компенсаторы на задании.
Проанализированы процессы в сконструированной системе с регулятором в качественном и количественном отношении (построен процесс в системе с регулятором, вычислен критерий оптимальности, проанализирована робастность, решена обратная задачи конструирования ).
На основании данного анализа можно сделать вывод о том, что наиболее подходящим регулятором для рассмотренной системы является оптимальный П. – регулятор. Хотя он и обладает некоторым перерегулированием, имеет небольшую статическую ошибку (при отсутствии компенсатора на задание), однако все эти недостатки компенсируются его простотой в установке и обслуживании. Помимо этого он обладает наименьшим временем переходного процесса, неплохим показателем критерия оптимальности. В силу своей простоты он является более надежным в том плане, что вероятность выхода из строя самого регулятора мала.
Литература
1. Стопакевич А.А., Методические указания к практическим занятиям по курсу « Основы системного анализа и теория систем » для бакалавров по автоматики. – Одесса: ОНПУ, 1997.
2. Стопакевич А.А. Сложные системы: анализ, синтез, управление. – Одесса: ОНПУ 2004
Введение
Проблема модернизации системы управления смесительного бака с целью улучшения его техника – экономических показателей требует решения следующих задач.
Исследование свойств технологического агрегата как многомерной системы для чего необходимо провести эквивалентное и аппроксимационое преобразование модели; провести анализ качественных и количественных свойств системы; идентифицировать многомерную математическую модель по данным эксперимента.
Конструирование многомерных регуляторов для рассматриваемого смесительного бака:
П. – регулятор, апериодический регулятор, децентрализованный регулятор, надежный регулятор, блочно – иерархический регулятор, регулятор для билинейной и для нелинейной модели, программный регулятор.
Оценка качества в замкнутой автоматической системы регулирования и выбор наилучшего типа регулятора.
Исследование свойств технологического агрегата как многомерной системы
Дата: 2019-07-30, просмотров: 308.