Нелинейная модель агрегата
Вывод нелинейной модели агрегата. На примере рассмотрим конкретную техническую систему – смесительный бак:
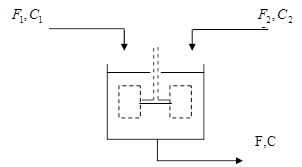
Рисунок 1. Модель бака
F1,F2,F - потери жидкости на истоке и притоке системы, м3/с;
C1,C2,C - концентрация на истоке и притоке системы, Кмоль/м3;
h - уровень жидкости в баке, м;
S - площадь бака,м2;
V - объем жидкости в баке,м3;
Запишем уравнение системы в стационарном (установленном) состоянии, когда приток равняется истоку (уравнение материального баланса):
F10+F20-F0=0 ; C1  ,
,
где индекс 0 означает установившееся состояние.
Записавши условия баланса кинетической и потенциальной энергии на выходе из бака (имеется в виду, что жидкость вытекает самостоятельно)
 ,
,
где
p - плотность жидкости, кг/м3;
w - скорость истока, м/с;
q - ускорение свободного падения,q=9.81 м/с2;
и допуская, что
d - диаметр выходного трубопровода, м.
Получим:
 ,
,
 ,
,
где
k – коэффициент.
При изменении потерь в системе происходит накоплении вещества и переход до нового установленного состояния. Этот переходный процесс описывается дифференциальными уравнениями
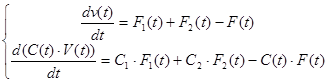
Где dv/dt – приращение объема жидкости,  - прирост массы жидкости.
- прирост массы жидкости.
Приведем эту систему в стандартном состоянии:
Обозначим:
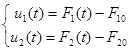
 – изменение во времени отклонения потери от номинального по отношению к первому каналу.
– изменение во времени отклонения потери от номинального по отношению к первому каналу.
 – изменение во времени отклонения потери от номинального по отношению ко второму каналу.
– изменение во времени отклонения потери от номинального по отношению ко второму каналу.
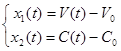
 – изменение во времени отклонения объема от номинального в баке;
– изменение во времени отклонения объема от номинального в баке;
 – отклонение концентрации от номинального значения;
– отклонение концентрации от номинального значения;
 – изменение потерь на выходе;
– изменение потерь на выходе;
 – изменение концентрации на выходе.
– изменение концентрации на выходе.
Запишем нелинейную модель в стандартной форме
Рассмотрим наполнение бака от 0 до номинального значения расхода с учетом прироста, приданного в линеаризованной модели. Таким образом, рассмотрим скачок u 1 =0,03; u 2 =0.
Обозначим  , уравнение бака запишем в виде системы:
, уравнение бака запишем в виде системы:


Подставляя  и u =0.063, найдем время, которое соответствует указанным значениям. Сведем результаты в таблицу.
и u =0.063, найдем время, которое соответствует указанным значениям. Сведем результаты в таблицу.
Таблица 1. Линеаризация системы по первому выходу
|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| y1 | 0.251 | 0.252 | 0.253 | 0.254 | 0.255 | 0.256 | 0.257 | 0.258 | 0.259 | 0.26 |
| t | 0 | 0.841 | 1.785 | 2.86 | 4.106 | 5.584 | 7.402 | 9.753 | 13.081 | 18.793 |
Т.к. нет аналитической зависимости  , используем ее кусочно-линейную аппроксимацию, представляя на промежутке от
, используем ее кусочно-линейную аппроксимацию, представляя на промежутке от  до
до  функцию как
функцию как  . Тогда,
. Тогда,


Занесем полученные значения в таблицу:
Таблица 2 Результаты промежуточного расчета
| a | 0.00119 | 0.00106 | 0.00093 | 0.0008 | 0.00068 | 0.00055 | 0.00043 | 0.0003 | 0.00018 |
| b | 0.251 | 0.252 | 0.253 | 0.254 | 0.255 | 0.256 | 0.257 | 0.258 | 0.259 |
Полученные значения занесем в таблицу:
Таблица 3. Линеаризация системы по второму выходу
| y2 | 3.2012735 | 3.2011172 | 3.2009393 | 3.2007371 | 3.2005089 | 3.2002573 | 3.1999954 | 3.1997612 | 3.1996304 |
| t | 0 | 0.841 | 1.785 | 2.86 | 4.106 | 5.584 | 7.402 | 9.753 | 13.081 |
Получение квадратичной модели
Уравнение квадратичной системы имеет вид:

Матрицы с подстановкой номинального режима:


Запись билинейной модели
Уравнение билинейной системы записывается в виде

Приняв допущение, что критерий оптимальности в форме О.А. Красовского

регулятор определяется по зависимости 
Где матрица определена как 
Линеаризованная модель
Линеаризуем зависимость  , разложив ее на ряд Тейлора.
, разложив ее на ряд Тейлора.



С учетом ранее изложенного запишем:

 ; (т.к.
; (т.к.  ), где
), где  ;
;

Припустив в случае остатка  . Тогда, подставив производную
. Тогда, подставив производную  , получим
, получим



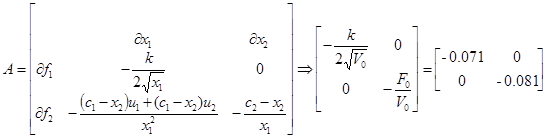
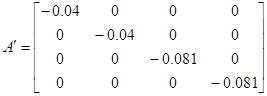
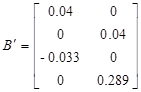
Представим систему в матричной форме:
Тогда матрицы А и В запишутся в виде
 ,
, 
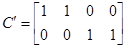
Для определения матрицы С необходимо установить связь между векторами x и y. Т.к.  ,
,  , то
, то
 ;
; 
 , то
, то 
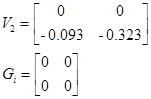
Тогда
Система будет иметь вид
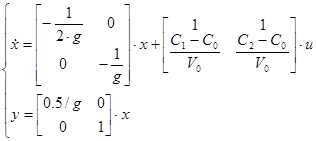
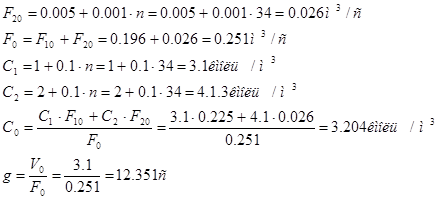
Коэффициенты модели системы:


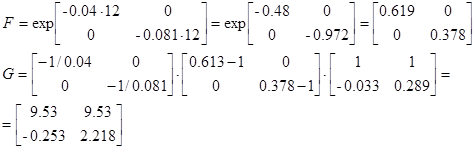
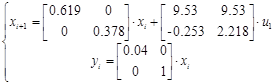
Модель в дискретном времени
Система в дискретном времени имеет вид:
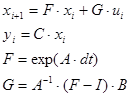
dt= 24 c.
Зададим  ,
,  , получим значения на выходах дискретной системы.
, получим значения на выходах дискретной системы.
Таблица 4 Значение выходов дискретной системы
| Возмущение | Реакция выхода системы y(t) | |||||||
| u1=0.01 u2=0 | y1 y2 | 0 0 | 0.00384 -0.00254 | 0.00624 -0.00352 | 0.0077 -0.03896 | 0.00859 -0.004038 | 0.00913 -0.00409 | 0.00947 -0.00411 |
| время t, с | 0 | 12 | 24 | 37 | 49 | 61 | 74 | |
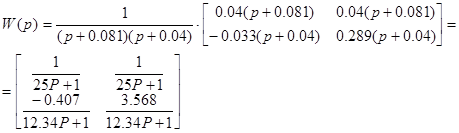
1.1.7 Преобразование модели в форме Ассео





Внешне связное форму получаем из матрицы передаточных функций




Вычисление МПФ системы
 ;
;  ;
;  ; n=2; i=1;
; n=2; i=1; 






Дата: 2019-07-30, просмотров: 328.