В повседневной жизни мы часто сталкиваемся со всякого рода колебательными процессами. При составлении их математических моделей в целях упрощения используется уравнение гармонических колебаний вида: y = S+Asin(w t +j) или y = S+Acos(w t +j). Система, описанная одним из этих уравнений, может находиться во взаимодействии с другой системой, но при этом даже если система описана линейным уравнением вида: y = k x+b, – возникают сложности при решении систем уравнений:
Существует множество различных пакетов прикладных программ, предназначенных для проведения математических и научно-технических расчетов. Прежде всего к ним следует отнести такие программы как Mathematica, MatLab, Maple, MathCad и др., но каждая из этих программ при решении систем нелинейных уравнений использует уже введенный разработчиками алгоритм, который сводится к использованию метода итерации, то есть нахождению решения с помощью последовательного приближения. Но такие встроенные алгоритмы универсальны и рассчитаны прежде всего на большой спектр разновидностей систем уравнений, носящих как линейный так и нелинейный характер, что замедляет их быстродействие и затрудняет их применение при громоздких циклических вычислениях. К недостатку также можно отнести и тот факт, что данные алгоритмы не всегда дают достоверный ответ, из-за универсальности их практически невозможно применять в некоторых частных случаях, о чем свидетельствует ряд проделанных расчетов в MathCad и MatLab.
В случае достаточно громоздких вычислений такая процедура занимает относительно много времени. Поэтому был разработан специальный алгоритм, позволяющий находить решение системы нелинейных уравнений с заданной точностью. Суть расчета заключается в постепенном приближении к истинному значению у методом итерации при изменении времени t. Структура данного алгоритма состоит из следующих этапов:
1. Определение значения параметра t уравнения, с которого начинается итерация (t нач =– b / k, с) и области определения решения системы уравнения:
tлев = (S-A-b)/k-1/(20 × w ), с;
t прав = (S+A-b)/k+1/(20 × w ), с (см. рис. 4.9).
Значение равное 1/(20×w ) (первоначальный шаг итерации) добавлено для расширения границ области поиска решения.
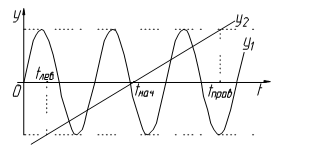
Рис. 4.9. Пояснительная схема к первому этапу итерации
3. Расчет вспомогательного коэффициента K при проверки выполнения условия: у1( t нач )>у2( t нач ), см. рис. 4.10.
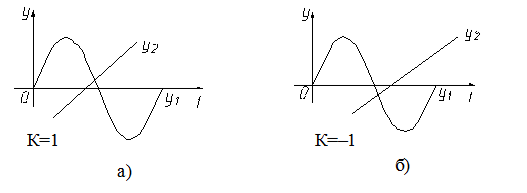
Рис. 4.10. Пояснительная схема к определению вспомогательного коэффициента К
4. Расчет начальной разности значений: ïу1( t нач )–у2( t нач )ï.
4. Определение первоначального шага итерации ( dt =1/(20 w )) и приравнивание к текущему значению параметра t = t нач.
5. Нахождение значения у методом итерации в двух направлениях:
5.1. Проведение итерации в направлении оси абсцисс (см. рис. 4.11): идет приращение параметра t= t+ dt (первоначально t= tнач).
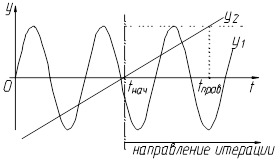
Рис. 4.11. Итерация в направлении оси абсцисс
Как видно из рис. 4.12 при первоначальном значении времени t не выполняется условие y2> y1, то есть K=1. Приращение к параметру t идет до тех пор, пока не выполнится условие К×(y1–y2)<0, что означает переход через точку пересечения графиков. Далее совершаются следующие операции: t= t- dt, dt= dt/2 и проверяется условие:  , где D y – точность расчета корней. Если последнее условие выполняется итерация прекращается и запоминается временное значение yврем1= y2 и tврем1 = t, в противном случае итерация продолжается с измененным значением dt (см. рис. 4.12). При этом необходимо следить чтобы значение параметра t не вышло за пределы [tлев, tправ].
, где D y – точность расчета корней. Если последнее условие выполняется итерация прекращается и запоминается временное значение yврем1= y2 и tврем1 = t, в противном случае итерация продолжается с измененным значением dt (см. рис. 4.12). При этом необходимо следить чтобы значение параметра t не вышло за пределы [tлев, tправ].
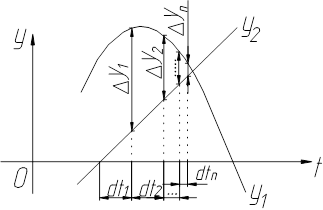
Рис. 4.12. Порядок проведения итерации
5.2. Проведение итерации в противоположном направлении оси абсцисс (см. рис. 4.13): идет уменьшение параметра t = t - dt (первоначально t = t нач). При этом совершаются действия аналогичные, описанным на этапе 5.1. для отыскания решения системы уравнений.
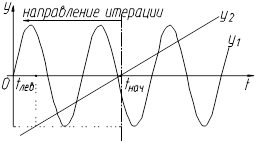
Рис. 4.13. Итерация в противоположном направлении оси абсцисс
6. Выбор необходимого решения из решений полученных на этпах. 5.1. и 5.2. путем отыскания из них решения с наименьшим значением y .
Таким образом, алгоритм программы обладает своего рода элементами искусственного интеллекта:
1) выбор начального шага итерации в блоках 9, 18 блок схемы (см. этап 4 вышеприведенного алгоритма);
2) выбор оптимального значения параметра t на начальном этапе итерации в блоках 9, 18 блок схемы;
4) мониторинг процесса итерации в целях предотвращения поиска решения за пределами области возможных решений системы нелинейных уравнений.
4) Изменение шага в процессе итерации для ускорения поиска решения.
По данному алгоритма была разработана блок схема и по которой написана программа на Delphi (см. приложение).
На базе данного алгоритма можно создавать алгоритмы для решения и других видов систем нелинейных уравнений, которые нельзя решить аналитически.
Дата: 2019-07-24, просмотров: 431.